
Fターム[5J084CA31]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コンピュータ処理 (337)
Fターム[5J084CA31]に分類される特許
121 - 140 / 337
人物検出装置、人物検出方法及びプログラム

【課題】人物検出装置、人物検出方法及びプログラムにおいて、人物を正確、且つ、比較的簡単に検出することを目的とする。
【解決手段】重力方向と平行な垂直面以外の任意平面で走査範囲を走査して基準位置から走査範囲内の対象物までの距離を測定する走査部と、距離に基づいて対象物の任意平面上の断面形状に相当する第1のパターンを算出する算出部と、人物の両脚に相当する任意平面上の断面形状の第2のパターンが予め複数登録されている記憶部と、第1及び第2のパターンを比較して、比較結果に基づいて対象物から人物の脚の特徴を抽出する抽出部と、抽出した特徴に基づいて対象物が人物であるか否かを判断する判断部を備えるように構成する。
(もっと読む)
光学式センサ汚損防止装置

【課題】汚れ防止のために光学式センサの前方に発生させるガスの流量を、汚損物サイズに応じて変化させることが可能な光学式センサ汚損防止装置を提供すること。
【解決手段】光学式センサ10の前方にガス流SBを発生させるガス流発生手段30を備える構成とし、光学式センサ10の前方を飛来する汚損物Pの大きさを検出する汚損物サイズ検出手段10を設ける。検出された汚損物Pの大きさに応じて、ガス流発生手段30によるガス流SBの流量を変化させるガス量調節手段20,30を備える構成とする。そして、汚損物Pのサイズが大きい場合に、ガス流SBの流量を増加することで、汚損物Pが光学式センサ10に付着することを防止する。
(もっと読む)
物体検出装置
【課題】 本願は、物体を精度良く検出することができる物体検出装置を提供する。
【解決手段】 本願の物体検出装置10は、2次元走査型の距離計測センサ12と、距離計測センサの出力に基づいて物体を検出する演算装置と、を備えている。距離計測センサ12は、計測対象となる物体36に応じて設定された測定高さH0より低い位置HLに設置されている。また、距離計測センサ12は、距離計測センサ12がセンサ正面を計測するときの距離計測方向θが水平面Pに対して斜め上方を向くように設置されている。
(もっと読む)
対象物検出装置
【課題】対象物か否かを判断する情報を残しながらも情報量を低減させ、距離画像を用いた対象物の検出における処理負荷を従来よりも低減する。
【解決手段】アクティブ型の距離画像センサ1により距離画像を生成する。背景取得手段2は背景距離画像を記憶し、差分画像生成手段3は、距離画像と背景距離画像とから距離差分画像を生成する。注目画素抽出手段4は、距離差分画像における画素値が存在閾値以上である画素を距離画像から注目画素として抽出し、密度計測手段5では、注目画素を3次元の仮想空間にマッピングし単位体積のブロックごとに注目画素の個数を密度として求める。有効ブロック抽出手段6は、密度が対象閾値以上であるブロックを有効ブロックとして抽出し、領域統合手段7は、隣接する有効ブロックを統合してグループを形成する。対象物判別手段8は、グループのサイズが適正範囲であれば、対象物として判別する。
(もっと読む)
遠隔監視システム
【課題】監視領域と監視室とが離れている場合であっても、低コストで監視業務を効率化することができ、障害物の内容や障害物検知装置の異常を的確に把握することができる遠隔監視システムを提供する。
【解決手段】レーザ光Lを照射して計測データDを出力する計測手段1と、障害物を検出する障害物検出手段2と、障害物検出時に警報信号を出力する出力手段3と、計測データDを単位時間Δt毎に区切った計測データファイルFを作成する計測データ処理手段4と、計測データファイルFを保存する記憶手段5と、計測データファイルFを出力手段3に伝送する通信手段6と、を備え、計測データ処理手段4は、障害物が検出された場合に障害物検出時tnの計測データDを含む計測データファイルFnを抽出して伝送する。
(もっと読む)
無人搬送車
【課題】光軸調整を容易に行うこと。
【解決手段】複数の反射部17a〜17eを左右方向に段状に配置してなる検査用の反射板17に対して発光させる。そして、反射光を受光することにより、何れの反射部17a〜17eからの反射光であるかを特定する。そして、その結果を、発光部の光軸を調整するための指標となる光軸調整情報として表示部16aに表示させる。表示部16aには、反射した反射部17a〜17eに対応するシンボルHa〜Heが点灯した状態で表示されるので、その表示内容から光軸調整の有無及び調整量を認識できる。
(もっと読む)
センサー系及びその動作方法
【課題】受光面積、受光量、感度、光電荷の伝送効率、正確度を向上し、チップ上の占有面積を低減できるセンサー系を提供する。
【解決手段】本センサー系は、半導体基板上に形成され、それぞれが、第1フォトゲートと第2フォトゲートとを含む複数のフォトゲート対と、半導体基板内に形成された第1共有フローティングディフュージョン領域と、半導体基板上に形成された複数の第1伝送トランジスタと、を含む。複数の第1伝送トランジスタのそれぞれは、第1制御信号に応答して、複数のフォトゲート対のそれぞれの第1フォトゲート下に形成された複数の電荷を第1共有フローティングディフュージョン領域に伝送する。
(もっと読む)
距離測定装置
【課題】測距対象物の誤認識を防止することができる距離測定装置を提供する。
【解決手段】距離測定装置10は、垂直方向に隣接する計測点までの水平方向の距離差が閾値より小さい場合に、所定の高さを有する測距対象物が存在すると判定する距離測定装置において、任意の測定点に対して距離を測定する測距部1と、測距部1による測定誤差、及び計測点の候補を記憶する記憶部2と、記憶部2により記憶された計測点の候補の中から、記憶部2により記憶された測定誤差による距離差の最大値よりも閾値の方が大きくなるものを計測点として選択決定する選択部3と、を備える。これにより、所望の測距対象物であっても測定誤差のために測距対象として判定されず誤認識してしまうことを防止することが可能になる。
(もっと読む)
距離情報抽出方法及び該方法を採用した光学装置
【課題】距離情報抽出方法及び該方法を採用した光学装置を提供する。
【解決手段】数学的に理想的な波形ではない実際の非線形的波形を考慮し、光学装置と被写体との間の距離を決定する方法及び装置が開示され、該方法と装置は、被写体に投射された波形の類型の制限を受けることなく正確な距離情報を抽出でき、歪曲及び非線形性がほとんどない高価の光源や光変調素子を使用する必要がなく、複雑な誤差補償手段が要求されない。また、既存の光源、光変調素子及び光学装置をそのまま利用でき、追加コストがかからない。さらに、あらかじめ計算された距離情報が保存されているルックアップテーブルを使用するために、距離情報を抽出するにおいて演算量が非常に小さいので、リアルタイム距離情報映像の撮影が可能である。
(もっと読む)
対象物検出装置及びプログラム
【課題】計算コストを削減して対象物を早期に検出する。
【解決手段】障害物推定部22で、レーザレーダ12の観測データ、及び車両センサ14の検出値に基づいて、障害物を検出すると共に、障害物の種類を推定し、死角領域推定部24で、障害物により形成される死角領域の位置、大きさ、及び死角領域境界線の長さを推定する。対象物推定部26で、死角領域推定部24の推定結果に基づいて、死角領域から出現する可能性のある対象物の種類を推定し、探索範囲設定部28で、死角領域の位置に基づいて、対象物の探索範囲を設定する。優先度設定部30では、探索範囲に優先度を設定する。探索条件設定部32で、死角領域推定部24の推定結果、及び自車両から探索範囲までの距離に基づいて、探索条件を設定し、対象物識別部36で、識別モデル記憶部34から対象物の種類に応じた識別モデルを読み出し、撮影画像の探索範囲から抽出されたウインドウ画像と照合する。
(もっと読む)
ピクセルアレイと記憶アレイを別個に備える復調センサ
【課題】ピクセルの開口率および画像品質を犠牲にすることなくピクセルサイズを縮小可能であり、各ピクセルの信号ごとに追加の後処理回路を所望に組み込むことができ、モーションアーチファクトを最小限に抑えることのできる復調センサを提供する。
【解決手段】複数のピクセル210を含み、各ピクセル210が少なくとも2個のサンプルを生成するピクセルアレイ110と、複数の記憶要素310を含み、各記憶要素310が複数のピクセル210のうちの対応する1つから少なくとも2個のサンプルを受け取る記憶アレイ150とを備える。
(もっと読む)
液晶表示装置および測距光学装置
【課題】 ビームスプリッタを備えた測距装置等において、安価で表現の自由度が高い液晶パネルを使用して、高輝度・高コントラストの表示が可能な表示装置を提供する。
【解決手段】 対物レンズと接眼レンズとの間の光路上に介装したビームスプリッタ3を介して、対物レンズからの観察像に、表示装置からの表示画像を合成する装置において、前記表示装置として、LEDをバックライト17aとして備える垂直配向型の液晶パネル17bを設け、かつ前記液晶パネルは、前記接眼レンズ(12)に向けた表示画像の光路L1に対して所定角度だけ傾斜して設ける。
(もっと読む)
放射線透視装置
【課題】運動する被検査物の内部を簡単に透視できる放射線透視装置を提供することを目的とする。
【解決手段】放射線透視装置が、放射線照射部から離間した被検査物に放射線を照射して被検査物の内部を透視する放射線透視装置であって、被検査物の位置を検出する位置検出手段と、該位置検出手段が、検出した被検査物の位置に向けて放射線を照射するように放射線照射部を制御する制御手段とを具備する。
(もっと読む)
三次元画像を形成するための識別専用オプトロニックシステムおよび方法
【課題】三次元画像を形成するための識別専用オプトロニックシステム及び方法を提供する。
【解決手段】光センサと、通信手段21、22と、コンピュータ処理手段1とを含み、センサが捕捉した画像から三次元の物体を再構成し、当該再構成に基づいて物体を識別可能にする、物体を識別するためのオプトロニックシステムであって、光センサが、物体5周囲の何通りかの観測角61、62で捕捉された、物体5の表面で反射される電磁放射の輝度レベルを表す物体の画像を記録でき、通信手段21、22が、物体表面で反射される電磁放射の輝度レベルを表す前記物体の画像を処理すべく構成された断層撮影機能によって、三次元で物体を再構成できるよう、前記画像をコンピュータ処理手段1に送信できる。
(もっと読む)
移動体検出方法及びレーザ距離測定装置
【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
測距装置、測距方法、及びそのプログラム
【課題】被写体の測距の高精度化を図ることができる測距装置、測距方法、及びそのプログラムを提供する。
【解決手段】測距装置は、光を発光する光源と、前記光源により発光されて、被写体で反射された反射光を撮像する撮像部と、前記撮像部が撮像することにより得られた画素の画素値を、被写体までの距離を示す距離情報に変換する距離情報変換部と、前記距離情報に基づいて第1の撮像条件を設定する撮像条件設定部と、前記光源及び前記撮像部を制御して、前記第1の撮像条件で前記被写体を撮像させる撮像制御部と、を備える。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。 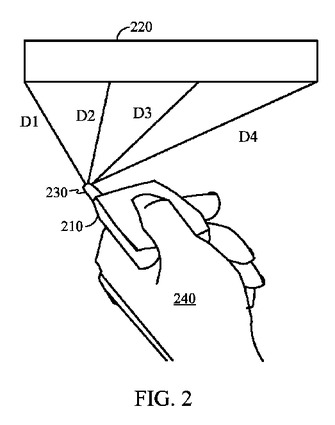 (もっと読む)
(もっと読む)
フォームファクタが小さいサイズセンサ
本明細書で開示される主題は、モバイル機器から遠隔の物体までの距離を測定すること、または遠隔の物体のサイズを測定することに関する。 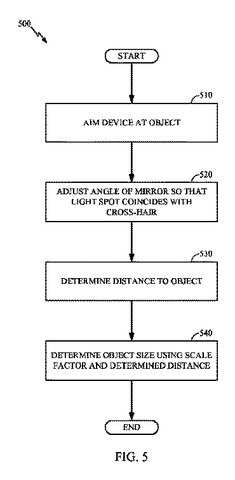 (もっと読む)
(もっと読む)
距離計測装置および距離計測方法
【課題】計測対象までの距離を適切に計測することができる距離計測装置および距離計測方法を提供すること。
【解決手段】計測対象に対して複数の投光ドットからなる投光パターンで光を照射し、前記光が照射された計測対象を撮像することで、前記計測対象までの距離を計測する際に、前記投光パターンを構成する複数の投光ドットを、前記光の光軸と垂直な面上の前記光の照射位置と撮像位置とを結ぶ直線と平行な複数の線であるグリッド線のうち、それぞれ、所定の一対のグリッド線を両端とするものとし、該投光ドットの両端を画定するグリッド線の位置、および前記撮像ドットの撮像画面上の位置に基づき、前記撮像ドットと、前記投光ドットとの対応付けを行い、対応付けた撮像ドットおよび投光ドットに基づいて前記計測対象までの距離を計測する。
(もっと読む)
測距装置および測距方法
【課題】被測定物までの距離の測定結果のバラツキを抑制する。
【解決手段】測定制御部71は、複数の光出力レベルの測定光を用いて、各光出力レベル毎に被測定物までの距離の測定処理を所定の回数ずつ実行するように、測距装置1の各部を制御する。統計処理部83は、所定の回数の測定処理において、受光した光の強度を示す受光信号の所定のサンプリング周期毎の値が所定の閾値以上となる回数を各所定の時間毎にカウントすることにより得られる度数分布を、各光出力レベル毎に作成する。選択部72は、各光出力レベルに対する度数分布の中から、被測定物までの距離の演算に用いる度数分布を選択する。演算部73は、選択された度数分布を用いて、被測定物までの距離を演算する。本発明は、例えば、被測定物までの距離を測定する測距装置に適用できる。
(もっと読む)
121 - 140 / 337
[ Back to top ]