
Fターム[5J084CA31]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コンピュータ処理 (337)
Fターム[5J084CA31]に分類される特許
61 - 80 / 337
距離画像カメラおよびこれを用いた対象物の面形状認識方法
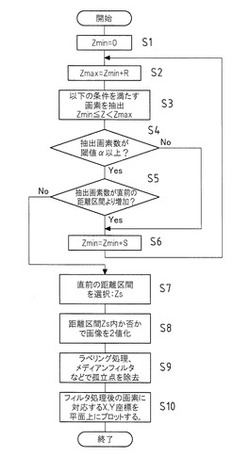
【課題】様々な形状の箱などが混載されている場合であっても、それらを正確に分離して認識可能な距離画像カメラおよびこれを用いた対象物の面形状認識方法を提供する。
【解決手段】対象物へ向けて光を照射する発光部11と、反射光が戻ってくるまでの時間の測定値から算出される距離情報を画素毎に有する距離画像を取得する撮像部12と、取得した前記距離画像の各画素の前記距離情報が前記距離画像カメラからの距離を複数に分割した距離区間のいずれに対応するかを判定し、前記距離区間毎に前記距離情報が対応する画素数をそれぞれ集計した集計結果が最大であった前記距離区間いずれかを選択するとともに、そうして選択された前記距離区間のみに前記距離情報が対応する画素の2次元配置位置に基づいて前記対象物が前記距離画像カメラに対向している面の形状を認識する画像処理を行う演算制御部13とを備える。
(もっと読む)
対象物識別装置及びプログラム

【課題】解像度が低下する遠方に存在する物体であっても、精度良く対象物か否かを識別する。
【解決手段】評価点群抽出部22で、レーザレーダ12により観測された観測データを取得して、観測データに基づいて、車両周辺の物体上の複数の点の各々を3次元空間に投影し、投影された点を点間距離に基づいてグループ化し、対象物の大きさに相当する大きさのグループに含まれる点群を評価点群として抽出する。特徴量算出部24で、抽出された評価点群の水平面内の分布の高さ方向の変化を示すスライス特徴量を算出し、識別情報記憶部26に記憶された識別情報と比較して、抽出された評価点群が示す物体が対象物か否かを識別する。
(もっと読む)
検査方法、及び検査システム
【課題】配置基準軸と設置基準軸とが規定条件を満たしているか否かの検査を、より好適に実施すること。
【解決手段】配置基準軸と設置基準軸とが水平方向に沿って不一致である場合、対象レーダ装置5では、右規定範囲と左規定範囲とが左右非対称となるため、右規定範囲と左規定範囲とでは、検出開始時間Tsが不一致となる。この場合、対象レーダ装置5から照射され、輪郭範囲の大きさは、正常輪郭範囲の大きさに比べて、大きくなったり小さくなったりする。配置基準軸と設置基準軸とが垂直方向に沿って不一致であれば、輪郭範囲は、対象レーダ装置5を中心として、正常輪郭範囲が回転した形状となる。したがって、検出開始時間Tsが基準時間を超え、検出時間Tdが基準範囲を超えていれば、配置基準軸と設置基準軸とが規定条件を満たしていないことがわかる。
(もっと読む)
測距システム
【課題】光源の強度や環境光に依存しない信頼性の高い距離情報を取得することができる測距システムを提供する。
【解決手段】照射装置と固体撮像装置と演算部とを備える測距システムであって、前記固体撮像装置は、第1照射タイミングで照射された照射光の反射光を第1受光期間で受光し、第2照射タイミングで照射された前記照射光の前記反射光を第2受光期間でそれぞれ受光するとともに、前記第1照射タイミング又は前記第2照射タイミングに対して予め決められた第3受光期間で受光し、前記演算部は、前記第1受光期間〜前記第3受光期間で得られた光電子数とを用いて前記測距対象までの距離を算出し、前記第1受光期間及び前記第2受光期間は前記固体撮像装置に到達する前記反射光の強度が減少してから該反射光の前記固体撮像装置への到達が終了するまでの時間を含み、前記第3受光期間は前記固体撮像装置に到達する前記反射光の強度が一定となる時間である。
(もっと読む)
形質計測装置及び形質計測システム
【課題】映像情報を用いることなく、形状データに基づくルゴシティを得ることで、水中の形質を簡単に把握することができる形質計測装置を提供する。
【解決手段】レーザ発振器15によって水中の測定領域に向けてレーザ光を射出する。光センサ19によって測定領域に照射されたレーザ光の散乱光を反射光として検出する。演算用PC11によって反射光に基づいて測定領域の形状データを計測し、計測した形状データに基づいて、測定領域の面積と表面積との関係をルゴシティとして算出し、算出したルゴシティに基づいて測定領域の形質を判定する。
(もっと読む)
計測装置,計測方法および計測プログラム
【課題】 レーザレンジファインダで複数の対象を計測して多様な情報を得る。
【解決手段】 計測装置(10)は、スキャン面(Scn)が水平面に対して傾斜したLRF(14)で複数の対象(T1,T2,…)を計測する。計測装置のコンピュータ(12)は、ステップS1で複数の対象に関する3次元形状モデル(M1,M2)をデータベース(50)に登録し、その後、ステップS3でLRF14を制御してスキャン面の水平面に対する傾斜角(α)を変化させつつ、ステップS5〜S19(およびS21〜S39)で複数の対象それぞれのパーティクルフィルタ(38a,38b,…)を用いてLRF14からの計測データと3次元形状モデルとの比較を行うことにより複数の対象それぞれの3次元形状および姿勢、特に人の体の方向および頭の方向を少なくとも推定する。
(もっと読む)
車載レーダ装置
【課題】道路環境に適した検知が可能な車載レーダ装置を提供する。
【解決手段】車両が左側通行であることに基づいて生じる左右非対称な道路環境や、ドライバの習性に基づいて生じる左右非対称な死角範囲を考慮して、右方向の検知に用いる右照射光SRは長い検知距離を、左方向の検知に用いる左照射光SLは、広い検知範囲を確保できるように設定(αL>αR,γL>γR,βL>βR)する。これにより、交差点に進入した時に交差道路の手前側車線を右方向から自車両に向かって接近してくる車両を、早期に検知することができると共に、ドライバの注意が右側に偏ることによって左側から前方にかけて広がる死角中の物標を、的確に検知することができる。
(もっと読む)
車両用物体検出装置
【課題】電磁波を用いて物体を検知する場合、反射強度の弱い、自車の進行方向に対して横長の壁などの物体が自車の進行方向に対して横方向から移動したと誤検知することを防止するようにした車両用物体検出装置を提供する。
【解決手段】自車の進行方向に電磁波を送信し、進行方向に存在する物体に反射させて得た反射点に基づいて物体を経時的に検知する車両用物体検出装置において、反射点を2次元平面に投影して得た点群を検出し(S10)、検出された点群の重心位置を算出し(S10)、算出された重心位置が進行方向に対して横方向に移動すると共に、横方向の検知幅が変化しているか否か判定し(S14,S16,S20,S22,S28)、算出された重心位置が横方向に移動すると共に、横方向の検知幅が変化しているとき、物体は横方向に移動していないと判定する(S24)。
(もっと読む)
反射型光電センサ
【課題】被検出物体の有無の検出以外に光電センサから被検出物体の反射率を判別することができる反射型光電センサを提供する。
【解決手段】図2(a)に示すように投光手段から被検出物体に照射する光Pfを第1〜第6のパルス光Pf1〜Pf6に分割し、各パルス光の投光量Eを相違させて、変化率ε1の光Pfを被検出物体に照射する。被検出物体から反射されたパルス光を受光手段により受光し、図2(b)に示すパルス光Pgの受光量Wの変化率ε2を判別する。被検出物体の反射率δが異なると、図2(b)又は図2(c)に示すようにパルス光Pgの受光量Wの変化率ε2も変化するので、この両者の相関データに基づいて、判定されたパルス光Pgの受光量Wの変化率ε2に応じた被検出物体の反射率δを選択して判別する。
(もっと読む)
状態判定装置、状態判定方法およびプログラム
【課題】監視エリアの様々な状態を容易に確認可能とする。
【解決手段】不特定多数の人(移動体)が往来する環境下での、通常状態での人の移動速度VRおよび移動方向θRを予め求めておく。そして、当該環境下で、人の移動速度Vおよび移動方向θを求め、これら移動速度Vおよび移動方向θと、通常状態において予め求めた移動速度VRおよび移動方向θRとを比較し、比較結果に基づき当該環境の状態が異常状態であるか否かを判定する。
(もっと読む)
レーザスキャナ及び動体検知方法
【課題】3次元データ内への動体の測定データの混入防止を自動で行うことで、作業効率の向上を図るレーザスキャナ及び動体検知方法を提供する。
【解決手段】投光光軸34に沿って測距光40を射出する投光光学系33と、測距光40を偏向し測定エリアに照射する偏向光学部材と、偏向光学部材を高低方向に回転させる高低角駆動部と、偏向光学部材を水平方向に回転させる水平角駆動部と、測距光40の反射光に基づき測定を行い測定エリアの距離データを求める測距部4と、測定エリアを含む画像データを連続して取得可能な第2の撮像部6と、制御部7とを具備し、制御部7は画像データと距離データとに基づき3次元画像を取得する第1の画像処理部と、時間的に隣接する画像データの比較により動体を検知する第2の画像処理部とを有する。
(もっと読む)
距離測定装置
【課題】測定対象物までの距離に拘らず、光検出器のダイナミックレンジの範囲で、測定対象物までの距離を精度よく測定することができる距離測定装置を提供する。
【解決手段】距離測定装置は、測定対象物に対し測定光を投光する光投光部と、等速で回転移動して対象物で反射された反射光を複数方向に反射可能に構成された可動鏡と、可動鏡で反射された反射光を集光する集光素子と、集光素子の焦点面に配置された予め定めた面積の受光領域を備え、受光領域で受光された光を検出する光検出部と、測定範囲の上限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が最大となる位置に可動鏡を移動させ、測定範囲の下限距離に在る対象物からの反射光を受光した場合には受光領域への結合効率が小さくなる位置に可動鏡を移動させる駆動制御部と、計測時間から測定対象物までの距離を演算する演算部と、を備える。
(もっと読む)
異物検知装置
【課題】低SNR環境下でも、異物を正確に検知することができる異物検知装置を得ることを目的とする。
【解決手段】三次元画像の縦方向成分が同一の画素単位に、異物の検知処理を開始する前に三次元画像撮像装置1から出力された各画素の反射強度値Ii,jの中で、最大の反射強度値Iimaxと最小の反射強度値Iiminを取得して、最大の反射強度値Iimaxを上限閾値THUPに設定するとともに、最小の反射強度値Iiminを下限閾値THLOWに設定する閾値設定部11を設ける。
(もっと読む)
安全性の高められたレーザー送信を制御する方法および装置
【課題】レーザー感知システムからのノンアイセーフレーザー信号の送信を制御して、レーザー感知システムの動作範囲の境界外に場所を定められた近くの物体に高められた安全性を提供すること。
【解決手段】信号の放出を制御するシステムであって、信号を送信する信号ユニットであって、システムは、送信された信号によって意図した目標と衝突するための動作範囲を含む、信号ユニットと、レンジユニットであって、物体の範囲を決定し、決定された範囲に基づいて信号の送信を制御し、信号の送信は、動作範囲外にある物体の決定された範囲に応答して不能にされる、レンジユニットとを備えている、システム。
(もっと読む)
車両用道路形状認識方法及び装置、記録媒体
【課題】デメリットシーンにおいてより正確な道路形状を頻度良く算出することができる車両用道路形状認識方法及び装置、記録媒体を提供する。
【解決手段】物体までの距離及び車幅方向の角度に基づき、車両前方の道路形状を認識し、その認識された道路形状及びその認識程度に基づき、物体が自車と同一車線上にいる可能性を判定し、その判定結果に基づいて自車線確率を補正するための補正値を算出する。そして、自車走行路の曲率と認識された道路形状の曲率とに乖離があるか否かを判定し、乖離がない場合、自車線確率を補正値にて補正し、その補正後の自車線確率に基づいて先行車を選択する一方、乖離がある場合、自車線確率を補正値にて補正せずに自車線確率に基づいて先行車を選択する。
(もっと読む)
物体検出装置
【課題】光学窓の汚れを検出するための受光素子を設けることなく、光学窓の汚れを検出できるようにする。
【解決手段】鉛直下方向を含む面内を走査するようにレーザー光の向きを変化させて光学窓を介して照射するとともに、レーザー光が物体に反射した反射光を光学窓を介して受光するレーザーセンサ10を備え、レーザー光の照射方向を鉛直下方向に変化させて、路面に反射した反射光が検出されたか否かに基づいて光学窓の汚れを判定する(S202〜S216)。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】受光素子に対する電気ノイズに対する影響を阻止することにより、誤検出の発生を防止することのできる光学式位置検出装置、および当該光学式位置検出装置を備えた入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置において、受光部13は、検出光が放射状に出射された検出対象空間に位置する対象物体で反射した検出光を受光する。受光部13には、受光素子130の受光面131を部分的に覆うシールド部材14が設けられている。シールド部材14において、入射部140は、受光面131に対する法線方向から一方側および反対側に傾くに伴って幅広になっている。従って、受光素子130での受光強度は、受光面131に対する法線方向から入射した検出光と、受光面131に対する法線方向から傾いた斜め方向から入射した検出光とにおいて差が小さい。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1BKと表面1FTとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が表面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と光入射面1BKとの間に位置すると共に、光入射面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
植生検出装置及び植生検出方法
【課題】座標変換などのシステムの統合を容易にし、またコストや物理的サイズも抑え、夜間など暗い環境にも対応する植生検出装置を提供する。
【解決手段】植物の葉で吸収されにくい波長の第1の3次元レーザレーダ21と、吸収されやすい波長の第2の3次元レーザレーダ22とから出力された計測値(距離、角度、反射率)を取得する第1及び第2の3次元点群取得部11及び12と、第1の3次元レーザレーダ21による第1の計測点と、その第1の計測点に最も近い第2の3次元レーザレーダ22による第2の計測点とを対応づける対応付け部16と、対応づけられた第1及び第2の計測点について、第1の計測点の反射率と第2の計測点の反射率との比を求める反射率比算出部15と、反射率の比に基づいて互いに対応づけられた計測点が植物か否かを判定する判定部17とを備えている。
(もっと読む)
距離センサ及び距離画像センサ
【課題】不要なノイズ成分の発生を抑制し、高精度な距離検出を行なうことが可能な距離センサ及び距離画像センサを提供すること。
【解決手段】距離画像センサ1は、光入射面1FTと裏面1BKとを有する半導体基板1A、電極TX1,TX2、半導体領域FD1,FD2、及び半導体領域SR1を備える。半導体基板1Aには、入射光に応じて電荷が発生する光感応領域が光入射面1FT側に設けられている。半導体領域FD1,FD2は、光感応領域にて発生した電荷を蓄積する。電極TX1,TX2は、光感応領域にて発生した電荷を半導体領域FD1,FD2に転送する。半導体領域SR1は、半導体基板1Aにおける半導体領域FD1,FD2と裏面1BKとの間に位置すると共に、裏面1BKに直交する方向から見て、半導体領域FD1,FD2を覆うように形成されており、半導体領域FD1,FD2と逆の導電型である。
(もっと読む)
61 - 80 / 337
[ Back to top ]