
Fターム[5J084CA31]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | コンピュータ処理 (337)
Fターム[5J084CA31]に分類される特許
21 - 40 / 337
画像処理装置、画像処理方法、プログラム、および画像処理システム
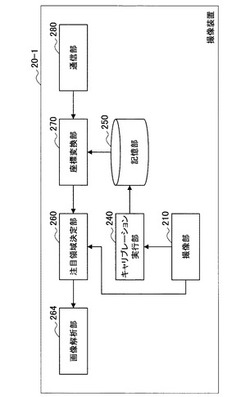
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
障害物感知装置及びそれを備えたロボット掃除機

【課題】円錐形ミラーを使用して均一なライン光を形成することによって、全方向に対する障害物の感知が可能な障害物感知装置及びそれを備えるロボット掃除機を提供すること。
【解決手段】障害物感知装置は、発光部、前記発光部を駆動させるための発光駆動部、及び前記発光部の光照射方向に、その頂点が前記発光部に向かうように配置され、前記発光部から発生された光を全方向に照射されるライン光に変換する第1円錐形ミラーを有するライン光発信部と;前記第1円錐形ミラーから照射された後、障害物に反射されて戻ってくる反射光を集光する第2円錐形ミラー、前記第2円錐形ミラーの頂点から所定の距離だけ離間するように配置され、前記反射光を通過させるレンズ、前記レンズを通過した反射光を撮像する撮像部、及び画像処理部を含む反射光受信部と;障害物感知制御部と;を含む。
(もっと読む)
滞留度検出装置及び乗客コンベア
【課題】利用者の足元を見ることで倒れを検知する装置を用いて、利用者の人数(占有率)と歩行速度に基づいて乗降口付近での滞留度を検出する滞留度検出装置、及び、乗客コンベアを得る。
【解決手段】人が滞留していることを検出する走査範囲である検知エリアに水平面状にレーザビームを放射するスキャン型距離センサ7を備え、スキャン型距離センサ7は、乗客の足元を見るように設置され、測定した角度毎の距離を蓄積し、スキャン型距離センサで捉えた検知エリア内のデータから人数と、足の静止時間により算出した歩行速度に基づいて警報や停止等の制御指令を出す。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置を、レーザビームの走査面を90°以内で変化可能な構成とし、走査面を一方向に角度45°だけ傾けて距離Laを測定し(S3)、次は走査面を逆方向に90°だけ傾けて距離Lbを測定する(S4,S5)。測定距離La,Lbより地面内の第1基準水平方向に対して傾いている角度θcを算出し(S6)角度θc傾ける(S7)。次に走査面を地面と直角にして(S8)距離Ld1,Ld2を夫々測定し(S10,S11)、その測定結果よりレーザビームが基準角度0°にある状態で第2基準水平方向と平行になるまでの角度差θxを算出すると(S12)、本体を地面の方向に角度差θxだけ傾けて走査面を90°回転させる(S14)。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
近赤外線及び遠赤外線を用いる物体検知装置
【課題】 物体を適切に検知することができる物体検出装置の提供
【解決手段】 自動ドアセンサ100は、近赤外線センサ部100A、遠赤外線センサ部100B及び制御部100Cを有している。近赤外線センサ部100Aは、近赤外線を用いて近赤外線検知領域R110に物体が存在するか否かを検知する。近赤外線センサ部100Aは、複数の近赤外線投光領域を形成することによって、物体の存在、物体の検知位置、物体の移動方向を検知する。遠赤外線センサ部100Bは、遠赤外線検知領域R130からの遠赤外線を受光することによって、遠赤外線検知領域R130に人が存在するか否かを検知する。制御部100Cは、近赤外線センサ部100A及び遠赤外線センサ部100Bの検知結果に基づいて、自動ドアシステム50のドアパネル55a、55bを開閉するための所定の信号を発生する。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置11に、本体11aが壁面3に設置された状態で、レーザビームの走査面を90°変化可能なものを使用し、レーザビームの走査面を地面2と直角にした状態で、2つの走査角度θ1,θ2について地面までの距離l1,l2をそれぞれ測定し、その測定結果に基づいて、レーザビームが基準角度0°にある状態で、地面2と平行になるまでの角度差θxを算出する。そして、レーザレーダ装置11の本体11aを地面2の方向に角度差θxだけ傾けて、レーザビームの走査面を90°回転させる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
侵入検出装置及びロボットシステム
【課題】撮像部によって上方から撮像して侵入物を検出する場合、検出範囲の形が円錐形となり、検出範囲がそれだけ狭くなってしまう問題が生じる。
【解決手段】作業が行われる領域を含む作業面1と、作業面1に設けられた識別領域3と、識別領域3に対向する位置に設けられた反射鏡4と、反射鏡4を介して識別領域3を撮像する撮像部5と、撮像された識別領域3の画像に基づいて、識別領域3に侵入した侵入物を検出する侵入物検出部と、を有する。
(もっと読む)
信号処理装置
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
レーザー監視システム
【課題】入港する船舶を検査するためのレーザー監視システムによる方法及びシステムの提供。
【解決手段】レーザー監視システムは、概して水位線150以下に配置された筐体と筐体内に配置されたレーザー及び検出器機構110を含む。この機構はレーザー源とセンサーを含む。レーザー源は、検査対象となっている船舶100に向けてレーザービーム220を発射するように構成されている。センサーはレーザービームの反射光を受信するように構成されている。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
距離,速度測定装置
【課題】測定周期毎に、送信波を反射した物標との距離(ひいては速度)を可能な限り精度良く求めることができる距離,速度測定装置を提供する。
【解決手段】受光チャンネルCHi(i=1〜4)のそれぞれについて一発測距回路321と積分測距回路322とを並行して動作させ、受光チャンネルCHiから得られる受信信号Riが上閾値より大となる一発測距領域では一発測距回路321による第1測距値D1を、受信信号Riが下閾値以下となる積分測距領域では積分測距回路322による第2測距値D2を、受信信号Riが下閾値より大且つ上閾値以下となる中間領域では、両測距値D1,D2の加重平均値を距離データDとして生成する。
(もっと読む)
位置・姿勢推定可能な移動体システム及び自律移動ロボットシステム
【課題】照射するレーザ光の反射光によって周囲の幾何的特徴を識別し、自装置の現在位置・姿勢を推定する際、幾何的特徴に乏しい環境においても確実に位置・姿勢を推定することが可能な移動体システムを提供する。
【解決手段】光学作用部材35を移動経路の棚や壁面等の障害物32に任意な位置と間隔にて取り付け固定する。これにより、移動体10から照射されるレーザ光は、障害物32から距離センサ部12に向けて反射するが、光学作用部材35からは反射光が到達しないため、反射光によって得られる幾何形状データ34に新たな幾何的特徴を生成することができ、移動体10は容易に自装置の現在位置及び姿勢を推定することができる。
(もっと読む)
車両用制御装置
【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
画像形成装置
【課題】装置を使用する予定のない人を検知してしまう誤検知を抑制することをより簡易な構成で実現することができる技術を提供する。
【解決手段】記録材に画像を形成する画像形成部と、人が操作するユーザインタフェースと、画像形成部を収納する装置筐体におけるユーザインタフェースを操作する人が位置する側の外面を形成する支持部カバー500と、人を検知する第1の人検知部600と、を備え、第1の人検知部600は、ユーザインタフェースを操作する人が位置すると想定される領域に人が近づいてきたことを検知可能な向きに配置された焦電型センサ610を有し、支持部カバー500は、第1の人検知部600の手前側に配置されて焦電型センサ610の検知範囲の一部を覆うことで、第1の人検知部600の検知範囲A1を水平面に対して斜め下方の範囲に限定する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
21 - 40 / 337
[ Back to top ]