
Fターム[5J084CA32]の内容
光レーダ方式及びその細部 (24,468) | 装置の電気系(制御回路) (5,248) | 統計的処理 (195)
Fターム[5J084CA32]に分類される特許
161 - 180 / 195
測距装置および測距方法

【課題】 複数回測距してみた個々の測距データのバラツキが小さい場合、測距回数を減らすことで測距時間を短縮し、逆に測距データのバラツキが大きい場合、測距回数をより多くすることで測距精度を向上させる。
【解決手段】 ステップS201〜S204により、投射レンズからスクリーン迄の距離に応じた値をM回算出する。ステップS205M回算出した距離に応じた値のバラつきを標準偏差を使って算出する。このバラつきが所定の範囲に収まっていればM回測定した平均値の値は正しいとし、これを最終的にピンと調整のための測距データとする。もし、所定の範囲に収まっていなければ、ステップS207以降で投射レンズからスクリーン迄の距離に応じた値をN回測定し、この(M+N)回測距した平均値を最終的にピンと調整のための測距データとする。
(もっと読む)
自己混合レーザを用いる三次元計測内視鏡

【課題】これまでの内視鏡において対象物までの距離を測るには対象物にスポット光を照射し、三角法に基づいて距離を求めていたが、基線長が短く精度に問題があった。また自己混合半導体レーザによれば近距離でも精度よく距離が測れるが、多点における計測が困難であった。
【解決手段】観察範囲の中央部を自己混合半導体レーザによる距離測定とし、周辺部をパターン投影法による距離測定とすることにより、自己混合半導体レーザの測定点の少なさを解消し、対象物の三次元計測の精度向上ができる。また、中央部において自己混合半導体レーザにより測定した結果を、パターン投影法による測定結果に反映させることにより、パターン投影法による測定結果の補正も行える。
(もっと読む)
光測距装置
【課題】受光パルスの波高値に影響されることなく高精度な測距が可能な光測距装置を提供する。
【解決手段】受光パルスをフィルタリングした後の信号のゼロクロス点を受光時刻として光パルスの投光時刻から受光時刻までの時間を計測して測距対象物1までの距離を算出する第1測距部5と、受光パルスレベルが閾値に到達した時点を受光時刻として光パルスの投光時刻から受光時刻までの時間を計測して測距対象物1までの距離を算出する第2測距部6と、波高値検出部7の検出波高値に基づいて検出波高値が低レベル領域のときは第1測距部5の算出距離を測距対象物1までの距離として選択するよう、高レベル領域のときは第2測距部6の算出距離を測距対象物1までの距離として選択するよう測距値選択部9に選択指令を出力する波高値判別部8とを備える
(もっと読む)
車両用レーダ装置
【課題】反射強度が低下した先行車両の検知可能距離の低下を抑制し、かつ、光学設計上の制約を少なくする。
【解決手段】距離検出を行うときには発光体140での発光を行わず、受光素子82に入射される光の強度に応じた受光信号が得られるようにし、距離検出を行わないときには発光体140での発光を行い、受光素子82における受光信号成分が一定値となるようにする。これにより、距離検出を行わないときの受光信号の波形から、一定値となる受光信号成分を差し引けば、ノイズ成分のみが残ることになる。そして、このときに得られるノイズ成分をバックグランドノイズ算出回路99で求めることにより、受光信号からノイズ成分を除去することが可能となる。これにより、レーダ装置の検知可能距離が低下することを防ぐことが可能となり、光学設計上の制約も少なくすることが可能となる。
(もっと読む)
検出センサ
【課題】比較的簡単な構成で、移動する物体を測定することが可能な検出センサを提供することを目的とする。
【解決手段】光電センサ30は、投光部31、受光部33、データ処理部40、出力回路51、出力回路制御部55などから構成され、移動するワークWに向けて、投光・受光動作を行なって、ワークWの位置を検出する。受光部33から出力される受光信号Cnはデータ処理部40に入力される。データ処理部40は第一データ処理部45、第二データ処理部47などから構成される。ワークが測定エリアになく測定が正しく行なわれていない場合には、受光信号Cnの変化が大きく現れるが、この変化を、第二データ処理部47で監視することで、ワークWが測定エリアから外れている場合には、出力回路51の出力動作を停止させる。これにより、ワークWが測定エリアから外れた状態で測定された測定結果が、外部に出力されることがない。
(もっと読む)
物体検出装置
【課題】物体の個体識別を簡素化するとともに高速化することができる物体検出装置を提供する。
【解決手段】レーザレーダ装置7は、検知領域内の物体を検知して(S101)、反射光量データを得るとともに(S103)、自車101から物体までの距離および方位を取得する(S103)。レーダ装置7は、取得した反射光量データに基づき、検知物体を高反射体または低反射体に属性判別する(S104)。CCDカメラ4は検知領域を撮像し(S105)、画像データ生成部5は画像データを生成する(S106)。画像処理部6は、レーダ装置7で得られた物体検知情報と属性情報とから画像データ上でのマッチング処理領域を設定して、それぞれの属性に応じたサンプリングパターンでパターンマッチングを行う。画像処理部6は、このマッチング結果に基づいて物体の個体識別を行う(S107)。
(もっと読む)
一体型レーザ/赤外線前方監視光学装置
【課題】FLIR/レーザーに基づく目標化および撮像システムにおいて、IRのLOSとレーザーのLOSとの固定された整合誤差およびダイナミック整合誤差を低減することにより、当該エリア内の目標を認識する能力を大幅に改善する。
【解決手段】IRのLOSとレーザーのLOSの間の固定された整合誤差は、改善された内部ボアサイトモジュール(図10)および対応するボアサイト方法により低減される。ダイナミック整合誤差はレーザーエネルギーおよびIRエネルギーの双方に対する単一ピッチ(405)ベアリングおよび共通ピッチ/ヨーアフォーカル(401)を使用する光電気サブシステムによって低減される。
(もっと読む)
レーザレーダ装置
【課題】キャリアリークを簡単な構成で低減することのできるレーザレーダ装置を提案する。
【解決手段】光強度変調ユニットが、光伝搬部材と、この光伝搬部材に形成された励振電極と、この励振電極にパルス化周波数変調のための変調信号を供給する変調ドライバと、全反射手段とを有し、光伝搬部材が、入力された送信レーザ光を、パルス信号によりパルス変調するとともに変調信号により周波数変調して送信パルス光を発生し、この送信パルス光を全反射手段に送り、全反射手段は、前記光伝搬部材から送られた前記送信パルス光を、再び前記光伝搬部材に送り返す。
(もっと読む)
風速計測方法及び装置
【課題】 局所VAD法で測定される各視線方向の風速測定値にオフセットが加わらないようにする。
【解決手段】 レーザ光発生装置22で生成されたレーザ光を、送受信部21から異なる2つの視線方向に向けて空中に発射すると共に、その反射波を送受信部21で受光し、受光装置23でセンシングする。風速算出部26で、発射されたレーザ光の周波数と、受信された反射波の周波数との相違に基づいて、それぞれの視線の延長方向における風速が算出される。このような風速算出動作が所定回数繰り返される。そして、平均風速演算部27により、風速算出部26で算出された複数の風速算出値に基づいて、前記測定ポイントの平均風速演算値が求められる。さらに平均風速演算部27では、平均風速演算値から、標準偏差に応じたオフセットを除く演算が行われ、測定ポイントにおける真の平均風速値が求められる。
(もっと読む)
レーザ測定のデバイスおよび方法
レーザレーダ66などの測定デバイスは、遠隔プローブボリュームに放射を送信するための送信部と、遠隔プローブボリュームからリターンされる放射を検出するための受信部と、検出されたリターン放射を分析するためのプロセッサとを含むことが説明されている。デバイスは、洗浄活動化信号に応答して、窓部54を洗浄するための関連の窓洗浄装置(例えば、ワイパ62)を有する窓部を通る放射を送受信するために適している。プロセッサは、検出されたリターン放射の特性が、前記窓部の少なくとも一部分を通る送信の低下を示したときに、窓洗浄装置を活動状態にするための洗浄活動化信号を生成するように構成されている。一実施形態では、円錐形に走査されたライダ66は、検出されたリターン放射のパワーが、デバイスからの放射の送信角度に応じて変動したときに、洗浄活動化信号を生成することが説明されている。対応する方法および耐候性レーザデバイス50もまた、説明されている。 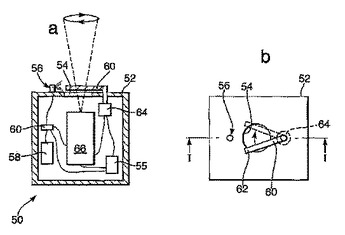 (もっと読む)
(もっと読む)
レーザ距離計
【課題】携帯型レーザ距離計の計算機能を拡充して利便性の向上を図る。
【解決手段】携帯型のレーザ距離計に、テンキー及び四則演算のためのキーを備え、これらのキーに距離測定のためのキー機能を割当て、機能切替え操作によってキー機能を距離測定と四則演算とに切替えられるように構成する。例えば、室内幅や外壁面幅を任意の数で割った値を求めたい場合は、室内幅や外壁面幅を測定した後に計算機能に切替えれば除算を行え、表示板に除算結果が表示されるので、手計算したり電卓などを用いて計算したりする手間が省ける。
(もっと読む)
パルス光伝播時間計測装置および仮想マウス等の応用装置
【課題】計測対象が激しく動いても精度良くパルス光伝播時間を計測する。
【解決手段】フェーズロックループ20の介在により送受光部10によるパルス送光と周波数変換回路30及び位相差検出回路50による位相差検出とを両立させたパルス光伝播時間計測装置において、もう一組のフェーズロックループ回路21と周波数変換回路31と位相差検出回路51を設け、そのうち一組はパルス信号Bpの立ち上がりに応動させ、他の一組はパルス信号Bpの立ち下がりに応動させ、その両組の位相差について平均を採ることにより、受光レベルの影響の少ない位相差Eが得られる。
(もっと読む)
物体検知装置および方法
【課題】検知領域の上下の傾きが生じる場合でも、簡単に、かつ確実に物体を検知することができるようにする。
【解決手段】車両11のレーザレーダは、垂直領域81乃至85にレーザ光が照射するようにレーザ光をスキャンする。レーザ光は、車両12によって反射され、車両11のレーザレーダによって受光される。レーザレーダは、垂直領域81乃至85のそれぞれの領域毎の受光量の中から、受光量が最大となる垂直領域(例えば、垂直領域84)を検出する。レーザレーダは、検出された垂直領域84の位置が垂直領域81乃至85の中心の領域83に位置するように、光軸ズレを補正する。本発明は、車両用レーザレーダに適用することができる。
(もっと読む)
距離測定装置及びその方法
【課題】 位相差方式の距離測定装置において、測定値の精度を落とすことなく、距離測定に要する時間短縮を図る。
【解決手段】 基準信号(K)を発生させる基準信号発振器(26)と、基準信号を基に変調された測距光(L)を出射する光源(20)と、ターゲット(22)で反射してきた測距光を受光して測距光を測距信号(M)に変換する受光素子(28)と、測距信号を中間周波信号に変換する周波数変換器(37)と、基準信号と同期して中間周波信号をサンプリングするA/D変換器(42)と、サンプリングされた中間周波信号データを記憶するメモリ(46)と、中間周波信号データから距離を算出するCPU(44)とを備えた距離測定装置において、CPUは、中間周波信号データから中間周波信号の各周期毎の振幅を算出するとともに、前記振幅の平均を求めて、中間周波信号データ数が最低必要数以上で、前記平均が所定値以上になったときは、サンプリングを終了して距離算出を行う。
(もっと読む)
測距装置及び測距方法
【課題】 比較的簡単な方法により、サンプリングクロック周波数を上げることなく、測距装置の精度を向上させる。
【解決手段】 標準クロック発振器12が発生する標準クロックAは、遅延回路13に入って遅延され、遅延回路13からは、標準クロックの周期の1/4だけ遅延された信号B、1/2だけ遅延された信号C、3/4だけ遅延された信号Dが出力される。これらの遅延信号B、C、Dは、基準クロックAと共に選択回路14に入力され、演算制御装置1からの指令により、これらの内の一つが選択されてサンプリング回路6のサンプリングパルスとして入力される。サンプリング回路6内のシフトレジスタは、選択回路14から入力されるサンプリングパルスが立ち上がるタイミングで、2値化回路10からの信号を最初のレジスタに入力すると共に、各レジスタに記憶されていた2値化信号を次段のレジスタにシフトする。
(もっと読む)
距離測定装置、及び距離測定方法
【課題】 測定時間を短くすることが可能な距離測定方法を提供する。
【解決手段】 本測定の前に、遠近判定のための予備測定を実施する。予備測定においても、複数回の測定を行い、各測定におけるカウント部2のカウント値に基づいて、距離ビン4のメモリを加算し、(b)に示すようなヒストグラムを作成する。遠近判定部は、このヒストグラムの内、T1以上Tp以下の範囲で、度数が定められた度数閾値n以上となるものがあるかどうかを判別する。もしあれば、近距離に存在する測定対象物からの反射光が得られたとして、近距離モードにセットする。もし無ければ、測定対象物は近距離に無いものとして、遠距離モードにセットする。そして、本測定においては、近距離モードと遠距離モードとにおいて、測定回数、ヒストグラム中の最高度数の判定に使用する範囲のうち、少なくとも一方を異ならせる。
(もっと読む)
散乱光によるエラーを抑制するための方法及び光学センサー
【課題】 物体表面(13)上で反射されて、検知器で検知される光線(7)が、タイミングを合わせて作動される主光源(5)を用いて生成される、光学センサー(1)を提供する。
【解決手段】 光線(7)の散乱光によって引き起こされる可能性の有る擾乱作用を抑制するために、主光源(5)の送出休止期間の間に、補償用光源(25)が、主光源(5)の光線(7)の散乱光領域を包含する光円錐を放射する。こうすることによって、この散乱光領域内の物体が、補償用の光に対する成分を発生させ、この成分が、専ら光線(7)の散乱光によってセンサー出力が駆動されるのを防止するものである。
(もっと読む)
測定装置、移動体および信号処理回路
【課題】 物体との間の物理量を細かく且つ高精度に取得できる測定装置を提供する。
【解決手段】 1パルスの出力波形が立ち下り切る前に次のパルスによって出力波形が立ち上がる連続パルスレーザ光を目標領域に照射する。この連続パルスレーザ光が出力されたときの照射光パルス信号と受光パルス信号は図3(a)(b)に示すものとなる。この照射光パルス信号と受光パルス信号に対し適用期間をずらしながら最小二乗法による平均化処理(ノイズ低減)を施す。さらに微分化処理を施して同図(e)に示す微分信号を取得する。そして、微分信号を閾値と比較し、閾値を立ち上がり方向に越えるタイミングを立ち上がりエッジとして検出する。検出した立ち上がりエッジを各パルスレーザ光の照射タイミングおよび受光タイミングとして設定する。両タイミング間において、内部クロック数をカウントし、時間差ΔTiとして取得する。ΔTiを用いて物体との距離を算出する。
(もっと読む)
高精度の距離測定装置およびその方法
本発明の態様によるターゲットのパラメータ測定システムおよび方法が、ターゲットに少なくとも1つの信号を送信すること、および、ターゲットから送信された信号の少なくとも一部分を受信することを含む。測定されたパラメータは、距離速度または反射率の1つである。送信された信号は、コヒーレントバースト波形のものであり、受信すると、等価時間サンプリング、誤差があったとしても、誤差が最小のAGC、位相計算離散フーリエ変換で処理される。 (もっと読む)
位置検出装置
【課題】 本発明は、対象物の位置を高精度に求めると共に、小型化が可能な位置検出装置を提供する。
【解決手段】 光信号を照射する光源と、対象物に取り付けられ、光信号を反射する反射手段と、光信号と反射手段により反射された光信号とを分離する第1の分離手段と、反射された光信号を受光する第1の受光素子と、第1の受光素子の出力信号に基づき、第1の受光素子の受光面における反射された光信号の位置を求める反射位置演算手段と、光源から第1の受光素子までの伝搬距離を求める伝搬距離演算手段と、反射位置演算手段に求められた受光面における反射された光信号の位置と、伝搬距離演算手段に求められた伝搬距離とに基づき、対象物の位置を求める対象物位置演算手段とを有する。
(もっと読む)
161 - 180 / 195
[ Back to top ]