
Fターム[5J084DA01]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 光学系統図、光路図 (844)
Fターム[5J084DA01]に分類される特許
141 - 160 / 844
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
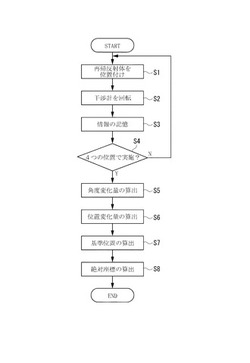
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
光電センサ並びに物体検出及び距離測定方法

【課題】複数のパルスを発射する度に統計分析を行い、ノイズに強い角度分解的な距離測定に応用する。
【解決手段】監視領域に存在する物体の検出及び距離測定するレーザスキャナでり、多数の互いに連続した個別光パルスを出射する発光器、発射光線を周期的に偏向回転可能な偏向ユニット、前記偏向ユニットの角度位置信号を生成する角度測定ユニット、物体により直反射又は拡散反射された受信パルスを生成する受光器、及び、多数の受信パルスを時間的なヒストグラムにまとめ、該ヒストグラムに基づいて物体までの光通過時間を求め、該時間から物体の距離測定値を確定する解析ユニットを備える光電センサにおいて、前記解析ユニットが、その都度の角度位置信号に基づいて受信パルスのグループを選択し、それをヒストグラムにまとめ該グループのヒストグラムに基づいて確定された物体の距離に関する測定値を前記角度位置信号により表される検出角度に割り当てる。
(もっと読む)
乗員頭部検知装置
【課題】演算負荷の増大を防止しつつ検知精度を向上させる。
【解決手段】乗員頭部検知装置10は、単眼距離画像センサ11から出力される距離画像を構成する複数の画素毎に3次元空間での法線ベクトルの逆方向に固定長の逆ベクトルを算出し、該逆ベクトルにより指定される3次元空間での位置座標を内部座標とする内部座標設定部52と、3次元空間を構成する複数の単位空間毎に該単位空間内に含まれる内部座標の総数に係るスコア値を算出し、複数の画素毎に対応する内部座標が含まれる単位空間のスコア値を複数の画素毎に対応させて示すスコア画像を生成するスコア画像生成部53とを備え、スコア画像を構成する複数の画像領域のうちからスコア値に基づいて車室内の乗員の頭部領域を抽出する。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
距離測定装置および距離測定プログラム
【課題】物体により反射される反射光に基づいて物体までの距離を測定する距離測定装置において、ダイナミックレンジの広い受光素子を備えることなく反射率の異なる各物体を良好に検出できるようにする。
【解決手段】運転支援システム1において受光部15は、光波を射出する発光部14からの光波が物体に反射されることにより得られる反射光を受光し、この光量に応じて出力をし、レーダ制御部11は、各受光部15による出力に基づいて光波を反射した物体までの距離を演算する。さらに受光部15は、異なる感度を有する複数の受光部15a〜15cを備えている。よって、ダイナミックレンジが広い受光部を利用した場合と同様に、受光部15によって検出可能な反射光の光量の範囲を拡大することができる。よって、ダイナミックレンジが広い受光部を備えることなく反射率の異なる各物体を良好に検出することができる。
(もっと読む)
姿勢検出装置
【課題】被験者の姿勢を示す値を正確に算出する。
【解決手段】各画素における輝度値がカメラから被験者までの距離を示す距離画像を取得する距離画像取得部102と、距離画像取得部102が取得した距離画像に基づいて、被験者に貼付された複数のマーカーの三次元空間中での座標を算出する座標算出部104と、座標算出部104が算出した複数のマーカーの座標から、被験者の姿勢を示す値を算出する姿勢算出部106とを備える。
(もっと読む)
レーザレーダ装置と出射調整方法
【課題】天候の急変にも即時に追随して人体に障害を与えることなく位置計測が可能なレーザレーダ装置を提供することが目的である。
【解決手段】天候の急変にも即時に追随して、対象物31での第一のレーザ光12Aおよび第二のレーザ光12Bの強度を所定の強度以下になるように、前記第一のレーザ光12Aおよび前記第二のレーザ光12Bの出射強度を調整するレーザレーダ装置1と出射調整方法を提供する。
(もっと読む)
姿勢検出装置
【課題】人物にマーカーを設置することなく、人物の姿勢を高精度で検出する。
【解決手段】各画素における輝度値がカメラから物体までの距離を示す距離画像を取得する距離画像取得部10と、前記距離画像取得部10が取得した前記距離画像に基づいて、三次元空間中での物体の座標を計算する座標計算部20と、前記座標計算部20が計算した物体の座標に基づいて、三次元空間中で所定の体積しきい値以上の体積を占める物体の領域である人物領域を決定する人物領域決定部30と、前記人物領域決定部30が決定した前記人物領域に、人体の骨格をモデル化した骨格モデルを当てはめることにより被写体人物の姿勢を検出する姿勢検出部40とを備える。
(もっと読む)
物体検出装置及びこれを備えた車載機器制御装置
【課題】互いに異なる波長帯の光を発する少なくとも2種類の検出対象物を検出する際に外乱光が存在しても、高精度な検出を可能とする。
【解決手段】撮像装置が撮像した画像データから、対向車両のヘッドランプと先行車両のテールランプがそれぞれ発する各検出波長帯(赤色と白色)についての分光情報を取得するとともに、同画像データから当該分光情報に対応した検出波長帯についての偏光情報を取得し、取得した分光情報によりヘッドランプとテールランプを識別し、偏光情報を用いてヘッドランプ及びテールランプからの直接光と雨路面からの照り返し光とを識別する。
(もっと読む)
ビーム照射装置
【課題】光検出器に迷光が入射し易いレイアウトにおいても、レーザ光の走査制御に対する迷光の影響を円滑に抑制することが可能なビーム照射装置を提供する。
【解決手段】ビーム照射装置は、走査用レーザ光が入射するスキャンミラー150とサーボ光が入射するサーボミラー124とを備えたミラーアクチュエータ100を有する。サーボミラー124により反射されたサーボ光は、PSD136により受光される。PSD136に隣接して高速フォトダイオード137が配置される。マイコン12は、PSD136から出力される信号に基づいてミラーアクチュエータ100を制御する。高速フォトダイオード137から出力される信号が所定の閾値を超えると、PSD136から出力される信号が、ノイズキャンセル回路2によって遮断される。
(もっと読む)
レーザレーダ
【課題】迷光が入射される場合にも、回路規模の増大を招くことなく、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ23と、目標領域において反射されたレーザ光の反射光を受光する光検出器33と、光検出器33を移動させる光検出器駆動部34を有する。光検出器駆動部34は、光検出器33を反射光の入射位置に移動させる。光検出器33を反射光の入射位置に移動させることにより、複数の光検出器および回路部を用いずに、反射光を精度よく検出することができる。
(もっと読む)
距離計
【課題】ユーザが誤った取り扱いをするのを回避することができ、これを通じて正確な計測結果を与えることができる距離計を提供する。
【解決手段】ハウジング10と、ハウジング内に設けられた、光ビームを用いて、目標物までの距離を非接触で計測するための測距部20と、ハウジング上に設けられた、ユーザが選択しうるようになっている少なくとも1つの計測起点50A〜50Dと、ハウジング上に設けられた、少なくとも測距部20を操作しうるようになっている操作ボタン30と、ハウジング上に、操作ボタンと関連づけられて設けられた、制御条件、および/または計測起点から目標物までの計測距離が示されるディスプレイ40とを備える距離計100において、ハウジング上に、ディスプレイとは別個に、計測起点50A〜50Dに1対1で対応し、いずれかの計測起点が選択された場合にアクティブ状態となる少なくとも1つの視覚的認識可能手段を設ける。
(もっと読む)
光学式位置検出装置および位置検出機能付き機器
【課題】参照用光源から出射された参照光が検出光出射空間に漏れてしまうことを防止しつつ、光検出器での参照用光源の検出強度を適正なレベルに抑えることができる光学式位置検出装置、および位置検出機能付き機器を提供すること。
【解決手段】光学式位置検出装置10では、対象物体により反射した検出光L3の一部を光検出器30により受光した結果、および検出対象空間10Rを介さずに光検出器30に入射した参照光Lrの強度に基づいて対象物体Obの位置を検出する。光検出器30と、参照光Lrを出射する参照用光源12Rとは、受光ユニット35を構成しており、参照用光源12Rから出射された参照光Lrが検出対象空間10Rに漏れることを回避する。受光ユニット35では、参照用光源12Rから出射された参照光Lrを、強度を低下させた状態で光検出器30に入射させるため、光検出器30での参照光Lrの検出強度のレベルを低く抑えることができる。
(もっと読む)
レーザートラッカー
【課題】 距離により最適なサーボゲインが異なるレーザートラッカーの制御において、距離情報を用いて、サーボゲインを最適な値にすることができるレーザートラッカーを提供する。
【解決手段】 レーザートラッカー1は、ターゲットTgにレーザービームLbを照射するレーザー光源2と、同レーザービームを直交する2軸回りにそれぞれ角度調整可能な角度調整手段3と、反射光を受光する受光部7と、照射するレーザービームLbと受光した反射光とからターゲットTgまでの距離を測定する測定手段4と、受光部7で認識された位置情報から可変ゲイン設定部に設定されたゲインに基づいて、角度調整手段3による角度を制御する制御手段5とを設ける。さらに測定手段4で測定した距離に反比例したゲインを求めて可変ゲイン設定部に設定するゲイン指令手段16を設けた。
(もっと読む)
三角測距方式の距離検出回路
【課題】三角測距によって遠距離から近距離までの広範囲な距離測定を行う場合に、特に高精度な部品を使用することなく簡単な構成でS/N比を上げるためのダイナミックレンジを確保しつつ、特性ばらつきの影響も受けにくくして距離測定精度の向上を可能とした三角測距方式の距離検出回路を提供する。
【解決手段】スポット光の入射位置に応じたN側信号およびF側信号がそれぞれ出力される光位置センサ(1次元PSD11)と、N側信号またはF側信号のいずれか一方を増幅する第1増幅器(増幅器12)と、N側信号およびF側信号を差動増幅する第2増幅器(差動増幅器20)と、第1増幅器および第2増幅器の各出力に基づいて距離を算出する距離算出部(CPU21)とを備える。
(もっと読む)
距離画像センサ
【課題】距離画像における物体と背景との境界における誤検知の発生を防止した距離画像センサを提供する。
【解決手段】画像生成部10は、強度を変調した変調光を対象空間に投光しその反射光を受光して対象空間の同物体について濃淡画像と距離画像とを生成する。フィルタ処理部20は、距離画像において、濃淡画像の光量が所定の閾値以下の画素に規定値を付与し、さらに規定値の画素に隣接する規定値以外の画素の画素値を、物体または背景の画素値に置換する。
(もっと読む)
レーダ装置
【課題】漏れ光に起因するゴーストを検出してしまうことを抑制できるレーダ装置を提供する。
【解決手段】照射方位が−10〜10degの場合(照射方位に物体が存在する場合に2つのPDがその物体からの反射光を受光する)、セル1のみをオンしたときの受光強度E1およびセル2のみをオンしたときの受光強度E2のうち、いずれか一方のみがゼロであれば、ゴーストであると判定して受光結果を削除する。照射方位が−18〜−10、10〜18degの場合(照射方位に物体が存在する場合に1つのPDがその物体からの反射光を受光する)、E1=E2或いはE1<E2であれば、ゴーストであると判定して受光結果を削除する。
(もっと読む)
レーザ測量機
【課題】簡便に点群データ取得の高速化を可能にするレーザ測量機を提供する。
【解決手段】異なる波長のパルス測距光10a,10bを発する複数の発光源8a,8bを有する光源部2と、各波長毎に時分割して発光させるパルス駆動部9と、前記複数の波長のパルス測距光10a,10bを光軸13上に射出する投光部3と、前記光軸13上に設けられ、前記パルス測距光10a,10bの各波長のみを反射する反射面を複数有し、前記パルス測距光10a,10bを波長毎に分割して測定対象物に向ける様偏向する偏向部材11と、前記測定対象物からの反射測距光10a’,10b’を受光する1つの受光素子12とを有し、該受光素子12からの受光信号24から各パルス測距光10a,10b毎に測距を行う。
(もっと読む)
レーザ画像計測装置
【課題】環境変化に左右されない正確な測距値を取得可能なレーザ画像計測装置を得る。
【解決手段】レーザ光の発振時間と反射光の受光時間との時間差に基づき対象物までの距離を導出するために、基準となる変調信号Mを生成する基準信号発生部20と、変調信号Mにより変調されたレーザ光を出射するレーザ光送信部30と、レーザ光を走査して整形された送信ビームLを出射するレーザ光走査部40と、反射光を受信信号に変換する受信部50と、レーザ光走査部40内のレーザ光走査光学系5から基準固定距離に設置されて送信ビームLが照射される基準反射板6と、受信信号から基準反射板6および対象物の距離値Dzを導出する信号処理部60と、を備える。レーザ光走査部40および受信部50は、基準反射板6からの反射光を、対象物に対する距離測定と同一の光路で送受信する。信号処理部60は、基準反射板6の距離変動量ΔDzから、対象物の距離値を補正する。
(もっと読む)
レーザ測定装置
【課題】検出エリア内におけるレーザ光の実際の照射高さを容易に計測し得るレーザ測定装置を提供する。
【解決手段】レーザ測定装置100は、レーザレーダ装置1と検出用基準物体90とを備えている。検出用基準物体90の反射部は、所定の高さ方向における各位置が高さに応じた構造をなし、且つレーザ光L1が入射したときに、当該レーザ光L1が入射する高さに応じた内容の特定反射光を発するように構成されている。一方、レーザレーダ装置1は、回動反射機構40から照射されるレーザ光L1の走査エリア上に検出用基準物体90が配置されたときにこの検出用基準物体90からの特定反射光を検出している。そして、反射光の状態と高さ情報とを対応付ける対応データを参照して特定反射光の状態に対応する高さ情報を求め、検出用基準物体90におけるレーザ光の照射高さを計測している。
(もっと読む)
141 - 160 / 844
[ Back to top ]