
Fターム[5J084DA01]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 光学系統図、光路図 (844)
Fターム[5J084DA01]に分類される特許
121 - 140 / 844
距離測定装置及びカメラ
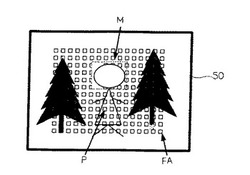
【課題】距離を正確かつ安全に測定することができる距離測定装置及びカメラを提供する。
【解決手段】オートフォーカス機能によって取得された画像データの画像処理を行って顔を検出し、顔以外の部分にレーザ光を照射して人Mまでの距離を測定する。正確な距離情報が得られたフォーカスエリアFAと他のフォーカスエリアFAとの差分からすべてのフォーカスエリアFAにある物体までの距離を算出し、ファインダ枠50内の全部の物体までの距離情報を取得する。
(もっと読む)
距離速度測定装置

【課題】スペクトル拡散方式による距離速度測定装置において、高精度に距離と速度を測定すること。
【解決手段】照射光を強度変調する拡散符号として、PN符号と周期符号との論理和をとった変調符号を用いる。周期符号の周期は、パルス幅の6倍以上とする。このような変調符号は、自己相関関数のピークが鋭いため、精度よく目標物までの距離を算出することができ。また、ローカル光と反射光とのビート信号をサンプリングする際に、周期符号の符号1のタイミングにおいては信号強度が0とはならないので、ビート信号を高精度に算出することができ、目標物の速度を共に高精度に測定することができる。
(もっと読む)
パノラマ画像作成方法及び3次元レーザスキャナ
【課題】測定範囲に対応するパノラマ画像中のコントラストが最適となる様にするパノラマ画像作成方法及びパノラマ画像中のコントラストが最適となる画像データを取得する。
【解決手段】測定対象物72,73,74を含む様に測定範囲70を設定し、測定範囲を所要分割して複数の区画71を設定し、各区画毎に撮影した画像を合成してパノラマ画像80を作成するパノラマ画像作成方法に於いて、各区画毎に複数の撮像条件で撮影し、少なくとも測定対象物については、最適な撮像条件で撮影された画像が用いられてパノラマ画像が合成される。
(もっと読む)
波長走査干渉計
【課題】移動する被検体までの絶対距離を高精度に計測するために有利な波長走査干渉計を提供する。
【解決手段】波長走査干渉計は、光源から射出される光束の波長を変更しながら該光束から分割された参照光と被検光との干渉光の信号に基づいて被検体までの絶対距離を計測する。波長走査干渉計は、前記光源から射出される光束の波長が互いに等しい時刻である第1時刻およびその後の第2時刻と、前記第1時刻、前記第2時刻のそれぞれにおける前記干渉光の信号の周波数である第1周波数、第2周波数とに基づいて、前記被検体の移動による誤差成分が低減された絶対距離を算出する処理部を備える。
(もっと読む)
光学情報読み取り装置
【課題】読み取り速度を向上させることができる光学情報読み取り装置を提供する。
【解決手段】光学情報読み取り装置から撮像対象物の複数の点までの距離を測定し(ステップS1)、測定した距離に基づいて、受光センサが撮像した画像を複数の領域に分割する(ステップS2)。そして、分割した領域から読み取り領域を絞り込む(ステップS3)。距離により画像を複数の領域に分割することから、輝度変化やエッジに基づいて領域を分割する場合と異なり、QRコード(登録商標)に起因する輝度変化以外の種々の輝度変化が撮像対象物にあってもその影響を受けない。よって、QRコードを含む領域に精度よく絞り込むことができ、その後の読み取り処理をやり直す場合が低下するので、読み取り速度が向上する。また、領域の絞り込みの精度が向上することから、情報の読み取り精度も向上する。
(もっと読む)
光波距離測定装置
【課題】視準方向の変更を招くことなく所望の位置の測定を可能とする光波距離測定装置を提供する。
【解決手段】光源(31)からの出射光(Es)を目標物へ向けて出射するとともに入射した目標物からの反射光(Rs)を受光部(60)で受光し、出射光と反射光とに基づいて距離測定を行う光波距離測定装置10である。光源から目標物への照射光軸Liに至る光路には、光源の出射光軸Leに対して出射光の方向を傾斜させるべく反射させる偏向反射機構(34)が設けられ、偏向反射機構は、光源から見て偏向反射機構よりも目標物側の出射光軸上もしくは照射光軸Li上の所定位置(E)と光学的に共役の関係とされている。
(もっと読む)
距離測定器及びその製造方法
【課題】低コストで製造され、小型で、検出する光量の損失が少なく、高精度に測定を行うことができる距離測定器を提供する。
【解決手段】光源1は、ホルダ81に固定され、レーザ光Lを射出する。有孔ミラー2は、光源1から射出されるレーザ光1の光軸に対して傾斜し、光源1からレーザ光Lを照射される照射領域Aが、光軸方向から見てレーザ光Lのファーフィールドパターンとなるように、ホルダ81に対して空間的に固定されたホルダ82に固定され、照射領域Aに、レーザ光Lに対して光学的に阻害がない透過部20を有する。走査部3は、透過部20を透過したレーザ光Lを、被測定物7に向けて反射させる。検出部5は、被測定物7において反射し、有孔ミラー2において反射したレーザ光Lを検出する。処理部6は、光源1及び検出部5の駆動を制御し、検出部5の出力に基づいて被測定物7までの距離を算出する。
(もっと読む)
空間計測システム及び計測方法、並びに昇降機制御システム
【課題】レーザセンサを用いて監視領域を計測して人や荷物(物体という)の存在状況を監視することで、監視領域へ物体が進入することができるかを判断する。
【解決手段】監視領域にレーザセンサにてレーザ光を照射して監視領域から測距データを得るレーザ監視装置と、特定する物体の三次元のサイズを大きさ毎に複数に区分して予め登録しておく物体認識データベースと、レーザ監視装置によって得られた監視領域の測距データについて、監視領域の背景データとの差分を取って、物体の三次元のデータを算出する検知部と、検知部で算出された物体データと、物体認識DBに登録された物体のサイズとを照合する判断部とを有し、判断部は、照合の結果、検知された物体の大きさが、物体認識DBに登録された特定物体サイズを超えていると判断した場合、その旨を示す情報を出力する。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法
【課題】ユーザの動作をより細かく判定することができる情報処理システム、情報処理プログラム、情報処理装置、入力装置、および情報処理方法を提供する。
【解決手段】情報処理システムの一構成例は、ユーザの身体の少なくとも一部を乗せることが可能な第1の入力装置と当該第1の入力装置から得られたデータを処理する情報処理装置とを含む。第1の入力装置は、ユーザの身体の少なくとも一部を乗せる第1の台部、および距離データ出力手段を備える。距離データ出力手段は、第1の台部の台面に対して離間する方向に位置する物体までの距離にしたがって決められる距離データを出力する。情報処理装置は、データ取得手段および処理手段を備える。データ取得手段は、距離データ出力手段から出力された距離データを取得する。処理手段は、データ取得手段が取得した距離データに基づいて、所定の処理を行う。
(もっと読む)
レーザレーダ
【課題】障害物がレーザレーダに接近した位置に有る場合も、障害物までの距離を精度よく測定することができるレーザレーダを提供する。
【解決手段】レーザレーダ1は、レーザ光を出射するレーザ光源21と、目標領域においてレーザ光を走査させるミラーアクチュエータ24と、目標領域において反射されたレーザ光を受光する光検出器33と、レーザ光のパルス幅を制御するとともに、光検出器33から出力される信号に基づいて目標領域における障害物までの距離を測定するDSP106と、を備える。DSP106は、目標領域における障害物までの距離に適するパルス幅を決定し、決定したパルス幅のレーザ光により障害物との距離を測定する。
(もっと読む)
光符号変調パルスの相関処理方式
【課題】光符号変調パルスの相関処理方式におけるサイドローブ雑音を低減すること。
【解決手段】光周波数シフタ12により光ファイバ1のブリルアン周波数シフトと同程度ダウンシフトされた連続光と、光変調器3により相関符号系列信号発生器13からの相補相関符号変調信号で変調されたポンプ光とが光ファイバ1中で干渉して発生する音波によってブリルアン増幅された前記連続光の受信信号を処理する際、相補相関符号系列信号A1(t)及びその要素を交換したA1-(t)による応答信号RA1(t)及びRA1-(t)の差信号ΔRA1(t)にステップ応答関数h(t)の逆数g(t)を乗じて音波の減衰を補正したA1(t)g(t)とΔRA1(t)との相互相関処理をした結果と、同じく相補相関符号系列信号B1(t)及びB1-(t)による応答信号RB1(t)及びRB1-(t)の差信号ΔRB1(t)にg(t)を乗じたB1(t)g(t)とΔRB1(t)との相互相関処理をした結果を合成する。
(もっと読む)
レーザレーダ装置およびレーザ合成開口レーダ装置
【課題】レーザレーダ装置(ライダ装置)において、測定可能距離を長くすると共に、距離測定分解能を向上させることを目的とする。
【解決手段】時間変化に対し周波数が変化する検出用信号を生成する検出用信号生成部12と、検出用信号によって発振光を変調するレーザ発振・変調部14と、レーザ発振・変調部14によって変調されたレーザ光を送信する送信光学系17と、レーザ反射光を受信する受信光学系18と、受信されたレーザ反射光に対し復調を行う復調部20と、復調された復調信号とのタイミングを、レーザレーダ装置10の位置に応じて調整する遅延時間設定部24と、遅延時間設定部24によってタイミングが調整された参照用信号を生成する参照用信号生成部13、および参照用信号と復調信号との差異を示す差異信号を生成する差異信号生成部22と、差異信号に基づいて、目標物の情報を取得する情報記録・処理部30とを備える。
(もっと読む)
障害物検知装置
【課題】表面状態の検出を可能とし得て、しかも、障害物とレーザとの間に設けた出射面の表面状態をリアルタイムに検出することができ、その表面状態に対応したレーザ光を照射する障害物検知装置を提供する。
【解決手段】本発明は、レーザ光源2と、レーザ駆動部3と、レーザ光源2から照射されたレーザ光をビーム偏向するビーム偏向素子4と、電圧制御部5と、出射面9と、受光面10と、検出器7と、コントロール部6と、を備え、ビーム偏向素子4の偏向角の一部のレーザ光を利用して出射面9の表面状態を計測するように出射面9に対して斜めから入射する反射ミラー11,12,13と、出射面9で反射したレーザ光を受光する検出器8と、を備え、コントロール部6は、電圧制御部5での電圧制御により出射面9の表面状態を計測した後に出射面9を透過する前方検出用のレーザ光を出力する。
(もっと読む)
物体検出装置及びこれを備えた車両衝突回避システム
【課題】検出対象物の誤検出が発生しにくい物体検出装置を提供することを課題とする。
【解決手段】探査レーザー光源から照射されるレーザー光を偏向器により走査し、その走査範囲からの反射光の強度に基づいて当該走査範囲内に存在する障害物を検出する物体検出処理を行う。物体検出処理では、走査範囲全域にレーザー光を走査して障害物の一次検出を行い、障害物を一次検出した場合には、障害物の検出箇所を含む所定範囲に走査範囲を限定して再びレーザー光を走査し、これにより検出した反射光の強度に基づいて障害物の2次検出を行う。
(もっと読む)
ミラーアクチュエータおよびビーム照射装置
【課題】ミラーの回動精度を保ちつつ、可動部に対する給電を円滑に行い得るミラーアクチュエータおよびこのミラーアクチュエータを搭載したビーム照射装置を提供する。
【解決手段】ミラーアクチュエータ1は、支軸24について回動可能なミラーユニットフレーム11と、支軸17に配されたミラー19と、マグネットユニット20とミラーユニットフレーム11とを連結するサスペンションワイヤー26a〜26fと、ミラーユニットフレーム11と支軸17とを連結するサスペンションワイヤー16a〜16dとを備える。サスペンションワイヤー16a〜16d、26a〜26fにより、ミラーユニットフレーム11に装着されたチルトコイル11bと、支軸17に装着されたパンコイル12b、13bに給電でき、ミラーユニットフレーム11と支軸17に対し、一定かつ安定的な抗力が付与される。
(もっと読む)
レーダ信号処理装置、レーダ装置およびレーダ信号処理方法
【課題】 例えば光波レーダにおいて、物体の動きが一様ではない場合でも、観測体積内の物体の偏光解消度を精度良く計測可能にすることを目的としている。
【解決手段】 レーダ信号処理装置において、算出した非偏光解消成分のスペクトルパラメータに基づいて偏光解消成分のスペクトルパラメータを算出し、このスペクトルパラメータの1つとしての受信光強度における非偏光解消成分に対する偏光解消成分の比である偏光解消度を算出するようにしたものである。
(もっと読む)
航空機搭載用大気浮遊物質検知ライダー
【課題】本発明の目的課題は、航空機が飛行中に前方の氷晶や火山灰等に代表される大気中の浮遊物質を検知する装置を提供することにある。
【解決手段】本発明の大気浮遊物質検知方法は、レーザ光を利用した航空機搭載ドップラーライダーにおいて、レーザ光を大気中に放射する送信光と遠隔領域の大気浮遊物質によって散乱された受信光との偏波面の角度差からレーザ光を反射散乱させた物質の成分を遠隔計測することを特徴とする。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
光測距装置
【課題】作業者の作業精度に影響されることなく、可動部の揺動角度を高精度に校正する。
【解決手段】光を2次元走査する光走査部2と、光走査部2を駆動する駆動部3と、光ビームを投光する光源部4と、物体からの反射光を受光する受光部5と、投光及び受光タイミングに基づき物体までの距離を計測する測距部6と、投光タイミングと、入射光線ベクトルと、光走査部の2軸回りの各揺動振幅とを含む変換パラメータを用いて測距部6からの距離データを点群データに変換するデータ変換部7と、基準特徴度データと実測特徴度データとの誤差が閾値以内であるか否かを判定する判定部8と、誤差が閾値より大きい場合、各揺動振幅の実際の値を決定する第1及び第2駆動信号の電流値の少なくとも一方を、判定部8により誤差が閾値以内であると判定されるまで、変更設定可能な設定変更部9と、を備えて構成する。
(もっと読む)
121 - 140 / 844
[ Back to top ]