
Fターム[5J084EA04]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 分解能向上 (227)
Fターム[5J084EA04]に分類される特許
81 - 100 / 227
レーザ光生成回路、レーザレーダ装置および輸送機器

【課題】発光パワーが大きくパルス幅が短いレーザ光を生成することが可能でかつ低消費電力化および小型化が可能なレーザ光生成回路、それを備えたレーザレーダ装置およびそれを備えた乗り物を提供する。
【解決手段】 直流電源PSからインダクタL1に電流が供給され、インダクタL1に磁気エネルギーが蓄積される。インダクタL1の電流が目標値に達すると、インダクタL1に蓄積された磁気エネルギーにより放電コンデンサC3が充電される。放電コンデンサC3が予め定められた電圧値まで充電されたときに、インダクタL1が直流電源PSから遮断される。その後、スイッチング素子S1がオンされる。それにより、放電コンデンサC3に蓄積された電荷の放電によりLD71にパルス状の電流が流れ、LD71からパルス状のレーザ光が出射される。
(もっと読む)
物理量センサおよび物理量計測方法

【課題】物体の変位や速度を高い分解能で計測する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、基準周期を補正する演算部8とを備える。
(もっと読む)
レーダ装置
【課題】よりS/N比のよいレーダ装置を提供する。
【解決手段】所定の照射角度範囲にレーザ光を順次照射する送信部10と、レーザ光が物体に反射した反射光を受光するために複数の受光素子が配列されている受光素子アレイ34と、反射光を受光素子アレイに集光させる受光レンズ32と、受光素子アレイ34を構成する複数の受光素子のうち、送信部10から照射されるレーザ光の照射角度に対応した受光素子を検出可能状態とする演算部60とを備え、受光素子アレイ34の受光信号に基づいて物体検出を行うレーダ装置1であって、受光レンズ32として、光軸が互いに異なる2つの受光レンズ32A、32Bを備える。
(もっと読む)
光波レーダ装置
【課題】コヒーレントドップラーライダ技術による光波レーダ装置において、高精度な速度および距離の計測を可能にした装置を提供する。
【解決手段】光ファイバコリメータ光学系12からの受信光と基準レーザ光源部1からの局部発振光の合波光から得られるビート信号の周波数成分を解析して対象物の速度を検出する第1信号処理部(16,17)と、送信光を伝送する光ファイバ伝送路において発生し後方へと伝搬する誘導ブリルアン散乱光を送信光から分離する分離用光路切り替え部(7)と、分離された誘導ブリルアン散乱光を送信光へ結合させるための第2光路合成部(11)と、光ファイバコリメータ光学系12から送受信された誘導ブリルアン散乱光により、パルス光の往復時間から対象物までの距離を検出する第2信号処理部(18,19)と、備えた。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】従来システムは、目標が動く動的な状況となると移行条件が満たされないにもかかわらず、その後に測定値の補正又は新しい測定が行われる欠点がある。このような動的な状況でも使用できる光通過時間による距離測定方法を提供する。
【解決手段】光通過時間原理により距離を測定する光電センサ10であって、光信号を発光する発光部12、直反射又は拡散反射された受光信号を受光する受光部16、及び解析ユニット18を備えており、解析ユニットが、観察時点に光信号を発光するための発光遅延時間をシステマチックに選択することにより受光信号のための移行条件を満たし、必要な発光遅延時間から光通過時間を計算するように構成されている。さらに、コントローラが設けられており、観察時点に移行条件を満たしているように発光遅延時間を追跡するように構成されている。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、より高い時間精度で距離測定方法を提供する。
【解決手段】発光時点調整部20は、時間ベースユニット38で二つの周波数をベースにして高分解能の時間ベースを提供し、例えば60.975psの倍数で光パルスの発光を遅らせる。更に発光時点調整部20は発光時間微調整ユニット40を有し、多数の個別測定値を使って例えばガウス形状の発光パターンを形成することにより、実際に生じている発光時間遅延を、物理的に可能な発光時点と比べて、属する受光パターンの重心により理論的に任意に細分化する。即ち、時間ベースユニット38が直接的に分解能を変更し、その分解能が発光時間微調整ユニット40により、統計的な重心シフトを介して間接的に更に細分化される。このように高分解能にした時間区分で送られた光パルスが受光され、A/D変換部36でデジタル化され、ヒストグラムユニット42でヒストグラム解析が行われる。
(もっと読む)
光電センサ
【課題】レーザ光源の時間的に高精度な応答を可能にした光電センサを提供する。
【解決手段】光電センサ10は、レーザ光源14を使って監視範囲24にレーザパルス18を発光する発光部12、及びレーザ光源がレーザパルスを発光する作動状態、又は準備状態に、発光部を移すように構成されているレーザ光源用の駆動回路16,30を備える。この駆動回路は更に、発光部をレーザパルスの発光前それぞれにのみ準備状態に移すように構成されている。
(もっと読む)
光電センサ及び光通過時間原理により距離を測定する方法
【課題】光通過時間原理により、高い時間的精度で距離測定するための、コスト的に有利な可能性を提供する。
【解決手段】10MHzのマスターサイクルから、周波数f1=400MHzないし周波数f2=410MHzの分割サイクルをつくる。差分周期の任意の倍数をつくり出すために、時間ベースユニットが、周波数f2のn番目の周期及び周波数f1のm番目の周期から成るペアを選ぶ。各ペアの位置はマスターサイクルに対して固定されており、例えばn=2及びm=6が4/f2+6ΔTの時間インターバルに相当し、1/f2=41ΔTである。そこでは、100ns経過して同期が起きるたびにカウンタがリセットされ、ペアの番号付けが最初から始まる。二つの周波数f1及び周波数f2に基づいて、検知区分よりもはるかに細かい時間ベースを使用できる。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するようにレーザ1を動作させるレーザドライバ4と、レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7が計測した個々の周期の基準周期に対する変化量に基づいて物体10の変位と速度のうち少なくとも一方を算出すると共に、周期の変化特性に応じて基準周期を補正する演算部8とを備える。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を干渉波形が入力される度に計測する信号抽出部7と、信号抽出部7が計測した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
レーザーによる測距方法
【課題】
従来のレーザーを用いた距離測定方法は、出射したレーザー光が被測定物で反射して戻って来る迄の時間を計って測距するものである。そのため測距精度はレーザー光の波長には遠く及ばない。また、レーザー光の特徴である可干渉性を利用した測定方法では、距離の変化量は波長程度の誤差で測定できるが、距離は分らない。
【解決手段】
本発明はレーザーの特徴である可干渉性を利用し、測距精度を波長程度、あるいは位相を考慮する事により波長以下にまで高めるものであり、その方法は発振波長の異なる2つ以上のレーザー光を用い、それぞれを参照光と測定光に分け、参照光と測距物から反射して来た測定光を干渉させ、参照光の伝播距離を変化させる或いは測定光の伝播距離を変化させる事により光路差を変えていくとそれぞれのレーザー光はそれぞれの周期で干渉による明暗をつくるので重ね合わせた明暗の間隔を知ることによって測距物までの距離を測るものである。
(もっと読む)
レーザーによる測距方法
【課題】
従来のレーザーを用いた距離測定方法は、出射したレーザー光が被測定物で反射して戻って来る迄の時間を計って測距するものである。そのため測距精度はレーザー光の波長には遠く及ばない。また、レーザー光の特徴である可干渉性を利用した測定方法では、距離の変化量は波長程度の誤差で測定できるが、距離は分らない。
【解決手段】
本発明はレーザーの特徴である可干渉性を利用し、測距精度を波長程度、あるいは位相を考慮する事により波長以下にまで高めるものであり、その方法は発振波長の異なる2つ以上のレーザー光を用い、それぞれを参照光と測定光に分け、参照光と測距物から反射して来た測定光を干渉させ、参照光或いは測定光の伝播距離を変化させる事により光路差を変えていくとそれぞれのレーザー光はそれぞれの周期で干渉による明暗をつくるので重ね合わせた明暗の間隔を測ることによって測距物までの距離を知るものである。
(もっと読む)
距離測定装置
【課題】遠方の対象物を検知可能とし、且つ、同時に近傍の対象物を高分解能で検出可能な距離測定装置を提供する。
【解決手段】第1点滅周期で点滅して第1波長帯の第1光波を他の物体に向けて発光する第1光波照射手段と、第2点滅周期で点滅して第2波長帯の第2光波を他の物体に向けて発光する第2光波照射手段とを、含む発光手段と、第1波長帯の光のみを透過させる第1濾光手段と、第2波長帯の光のみを透過させる第2濾光手段とを、含む分光透過手段と、物体で反射して第1濾光手段を透過した第1透過光を受光し当該第1透過光の受光量に応じた第1受光信号を出力する第1受光手段と、物体で反射して第2濾光手段を透過した第2透過光を受光し当該第2透過光の受光量に応じた第2受光信号を出力する第2受光手段とを、含む感光手段と、第1受光信号および第2受光信号に基づいて物体までの距離を算出する距離算出手段とを備える、距離測定装置である。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、発振波長が増加する第1の発振期間と発振波長が減少する第2の発振期間のうち少なくとも一方が繰り返し存在するように半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7の計測結果を基準周期と比較することにより補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
レーザビーム照射装置
【課題】光学系を小さく設計しても、レーザビームの大出力化または高分解能化、及び、ビームパターンの歪みの緩和を両立できるレーザビーム照射装置の提供。
【解決手段】発光点22とレンズ10の間にプリズム24を配置する。プリズム24は、自身に対応する発光点22から発光されたレーザビームを、発光点22の配列の内側に向けて屈折させるように構成されている。プリズム24を透過した後にレンズ10に入射したレーザビームは、外側に向けて屈折する。そして、任意の広がり角でレンズ10から出射される。
(もっと読む)
距離計測装置及びプログラム
【課題】対象物の3次元位置を精度よく計測することができるようにする。
【解決手段】第1撮像部20及び第2撮像部22によって、撮像対象物を各々異なる位置から撮像して、複数の撮像画像データを出力し、3次元距離算出部24によって、出力された複数の撮像画像データに基づいて、撮像対象物を表わす領域内の各画素に対応する3次元位置までの距離を算出して距離画像を生成する。レーザレーダ14によって、レーザの走査方向に並んだ各2次元位置までの距離を計測する。座標変換部32によって、レーザレーダ14によって距離が計測された2次元位置を、距離画像の画素座標に変換する。補正領域抽出部34によって、変換された画素座標に基づいて、位置距離画像から補正対象領域を抽出し、3次元距離補正部36によって、補正対象領域内の各画素に対応する3次元位置までの距離を、レーザレーダ14によって計測された距離に補正する。
(もっと読む)
三次元及び距離の面間推定を与えるための方法及びシステム
本発明は、シーン内の1又は複数の被写体の3−A(三次元の)被写体外形の面間推定及び/又は距離の面間推定を行うシステム、装置及び方法に関する。方法は、(a)特徴タイプを生じさせる、各特徴タイプが固有の二次元構造により識別可能である所定の明確な特徴タイプの有限セットを準備すること、(b)特徴タイプの多数の外観を含む符号化光パターンを準備すること、(c)軸方向に変化する強度を有する符号化光パターンを、第1の面を生じさせまた第2の面を生じさせる少なくとも2つの面を有するシーン内の1又は複数の被写体に投射すること、(d)被写体に投射された投射符号化光パターンを有する被写体の2−D(二次元の)画像を捕捉し、これにより、反射された特徴タイプを含む、捕捉された2−D画像を生じさせること、(e)2−D捕捉画像の強度値を決定し、決定された強度値を生じさせること、及び(f)決定された強度値に基づいてシーン内の1又は複数の被写体の3−D被写体外形面間推定及び/又は距離の面間推定を行うことを含む。 (もっと読む)
投光ユニット、および物体検出装置
【課題】長さ方向における光強度分布のばらつきを抑えた線状の光を投光することができる投光ユニットを提供する。
【解決手段】LD11が出射したレーザ光は、ライトガイド12に入射され、ライトガイド12内で屈折を繰り返し、出射面に伝搬する。ライトガイド12の出射面から出射されるレーザ光の形状は、横幅w×縦幅hの矩形形状である。また、ライトガイド12の出射面は、投光レンズ13の焦点距離fを半径とする曲面を横幅方向に形成しているので、投光レンズ13の光学中心から、ライトガイド12の出射面までの距離が、ライトガイド12の横幅方向において等しい。このため、投光レンズ13を通って前方に投光されるレーザ光は、横幅方向において、この投光レンズ13の収差の影響が抑えられる。したがって、長さ方向における光強度分布が略均一な、線状のレーザ光を投光することができる。
(もっと読む)
レーザトラッカ
【課題】簡単な構成で要求される性能を維持しつつ、測定が中断しても高精度な測定を行うことができ、使い勝手の良いレーザトラッカを提供する。
【解決手段】本体からターゲット106迄の絶対距離を測定する光コム距離計201と、モータ113、115を用いてレーザ光3の方向を変えることのできる2軸の回転機構と、ターゲットと本体との相対的な角度を測定する2軸分の角度測定手段114、116と、光コム距離計が出力する絶対距離のデータと角度測定手段が出力する2軸分の角度データから、ターゲットの空間座標を算出するデータ処理装置110と、ターゲットに入射するレーザ光の光軸と直角方向にターゲットが移動すると、この移動量と移動する方向に応じた信号を出力する光位置検出手段109と、光位置検出手段から出力された信号を用いて、移動量がゼロになるように2軸の回転機構を制御する制御手段111、112とを備える。
(もっと読む)
深さ映像獲得装置および方法
深さ映像獲得装置が提供される。第1光照射部は第1照射光を照射し、第2光照射部は第2照射光を照射し、受光部は、前記第1照射光による第1反射光および前記第2照射光による第2反射光を受光する。一方、処理部は、前記受光部の第1画素から提供される電荷量に基づいて前記第1画素に対応する深さ値を算出する。 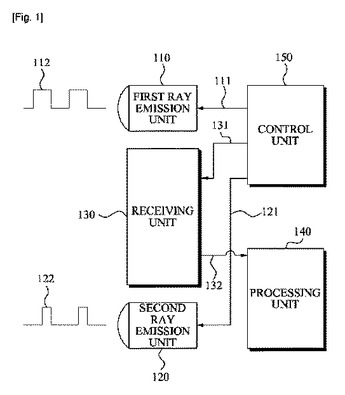 (もっと読む)
(もっと読む)
81 - 100 / 227
[ Back to top ]