
Fターム[5J084EA04]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 分解能向上 (227)
Fターム[5J084EA04]に分類される特許
121 - 140 / 227
駐車支援方法
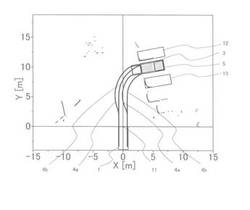
【課題】 後退による駐車を行う際、駐車位置の事前計測を行わずに、駐車体勢の時点で駐車位置の検出と軌道の生成を行い、駐車位置へ誘導する駐車支援方法を提供することを課題とする。
【解決手段】 車両1の後方に設置したレーザ測定器11を用いて、車両後方にある駐車車両の輪郭を計測し、レーザ測定器11にて計測できない部分は計測結果に略矩形の形状を重ねることにより輪郭を補い、駐車車両11、12、及び隣接する仮駐車目標位置3を求める。次に車両1の現在位置と仮駐車目標位置3を結ぶ軌道4を求め、車両1を自動的に誘導する。後退駐車中も計測を繰り返し行い、駐車車両11、12、及び軌道4を適宜補正し、最終的に駐車位置5に車両1を誘導する駐車支援方法を提供する。
(もっと読む)
移動物体検出装置及び移動物体検出方法

【課題】複数の移動物体の検出点を高精度に対応付けることができる移動物体検出装置及び移動物体検出方法を提供する。
【解決手段】自車両の周囲を走行する車両の位置情報を一定周期で繰り返し検出するLIDAR2と、これらの検出点を車両ごとに対応付けるECU3とを備え、このECU3は、前々回検出された各検出点から前回検出された各検出点までの距離と、前回検出された各検出点から今回検出された各検出点までの距離を算出し、これらの距離の差分が最小の関係となる検出点を対応付ける。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の高速検知と物理量の高分解能計測とを両立させる。
【解決手段】物理量センサは、半導体レーザ1と、半導体レーザ1から放射されたレーザ光とその戻り光とを受光するフォトダイオード2と、フォトダイオード2の出力信号に含まれる、半導体レーザから放射されたレーザ光とその戻り光との自己結合効果によって生じる干渉波形の周期を検出し、反射壁面10による干渉波形の周期と異なる周期の干渉波形が所定の条件を満たすときに、レーザ光の放射方向に物体12が存在すると判定する物体検知装置11と、フォトダイオード2の出力信号に含まれる干渉の情報から物体12の物理量を計測する計測手段(電流−電圧変換増幅器5、フィルタ回路6、計数装置7、演算装置8)とを有する。
(もっと読む)
測距装置および測距方法並びにプログラム
【課題】距離画像および輝度画像の双方を生成するに際し、高解像度の輝度画像を生成できるようにする。
【解決手段】測距光照射部3が、所定周期にて強度変調された測距光を被写体に照射し、複数の受光素子が配列されたCCD13が被写体による測距光の反射光を受光し、受光光量に応じた信号を出力する。この際、撮像制御部19が、所定数の受光素子からなる受光素子単位にて、測距光の変調周期における互いに異なる複数の位相において反射光をそれぞれ受光して、複数の位相毎に信号を取得するようCCD13を制御する。距離画像生成部31が、複数の位相毎の信号に基づいて、受光素子単位にて被写体までの距離を表す距離情報を算出し、距離情報を各画素の情報とする距離画像を生成する。輝度画像生成部32が、複数の位相毎の信号に基づいて、受光素子単位にて被写体の輝度を表す輝度情報を複数算出し、各輝度情報を各画素の情報とする輝度画像を生成する。
(もっと読む)
距離測定方法及び装置
【課題】 距離測定方法及び装置を提供する。
【解決手段】 光パルスが照射された時から照射された光パルスが受信されるまでのクロックパルスの数をカウントし、光パルスが受信された時から受信された光パルスとクロックパルスとが重畳するまでのクロックパルスの数をカウントして、カウントされたクロックパルスの数を利用して対象物体との距離を計算することによって、低い周波数を持つ光パルス及びクロックパルスを利用して対象物体との距離を高い精密度で測定できて、コスト及び消費電力を低減させることができる。
(もっと読む)
物体認識装置および物体認識方法
【課題】 測距センサを用いた2次元距離測定装置により物体認識を行う場合に、認識精度を向上し測定時間を短縮するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aと、測距センサ212aの走査範囲で測定可能な測定点を含む画像を撮影するカメラ222とを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果に基づいてセンサ特徴点を検出し、カメラ222から画像を取得し、カメラ画像から線分を検出し、検出したカメラ画像の線分およびセンサ特徴点に基づいて連続面の境界を認識する。
(もっと読む)
物体認識装置および物体認識方法
【課題】 脚型ロボットまたは脚車輪型ロボットの姿勢制御に好適で、かつ、測距センサを用いた2次元距離測定装置により物体認識を行う場合に認識精度を向上するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果を直交座標系の座標に変換し、変換された少なくとも2つの測定点の座標に基づいてハフ変換により直交座標系における線分を検出し、検出した線分に基づいて物体上の連続面または連続面の境界を認識する。
(もっと読む)
物体認識装置および物体認識方法
【課題】 脚型ロボットまたは脚車輪型ロボットの姿勢制御に好適で、かつ、測距センサを用いた2次元距離測定装置により物体認識を行う場合に認識精度を向上するのに好適な物体認識装置を提供する。
【解決手段】 脚車輪型ロボット100は、基体10と、基体10に対して自由度を有して連結された脚部12と、脚部12に回転可能に設けられた駆動輪20と、物体上の測定点までの距離を測定する測距センサ212aを備え、測距センサ212aを走査し、その走査範囲で測定可能な測定点について測距センサ212aの測定結果を取得し、取得した測定結果を直交座標系の座標に変換し、変換された測定点間を線分で接続し、得られた線上の点の座標に基づいてハフ変換により直交座標系における線分を検出し、検出した線分に基づいて物体上の連続面または連続面の境界を認識する。
(もっと読む)
駆動回路
【課題】負荷のリアクタンス成分の変動によって負荷を駆動するための出力の立上り時間が変動した場合であっても負荷の動作が変動するのを抑制する。
【解決手段】負荷Aの容量値が変動した場合、駆動回路1の傾き調整回路6は、電流制御回路50,51のpMOS52及びnMOS53に印加するゲート電圧を調整し、pMOS52及びnMOS53の各ソース−ドレイン間に流れる電流を調整する。つまり、出力ドライバ4のCMOS回路40を構成するpMOS41及びnMOS42のそれぞれのオン時にpMOS41及びnMOS42の各ソース−ドレイン間に流れる電流を調整する。これにより、出力ドライバ4と負荷Aとの間に流れる電流を制御し、負荷Aの容量成分を充放電させる時間を制御するため、負荷Aの駆動電圧の立上り及び立下りの傾きを補正し、上記駆動電圧の立上り時間及び立下り時間を一定時間にする。
(もっと読む)
距離・振動計および距離・速度計測方法
【課題】距離計測を主目的にする場合と速度計測を主目的にする場合で半導体レーザの波長変化率が適切になるように切り替える。
【解決手段】距離・振動計は、半導体レーザ1に、発振波長が連続的に増加する第1の発振期間と発振波長が連続的に減少する第2の発振期間を交互に繰り返させるレーザドライバ4と、フォトダイオード2と、フォトダイオード2の出力に含まれる、半導体レーザ1の出力光と測定対象12からの戻り光との干渉波形の数を、第1の発振期間と第2の発振期間の各々について数える計数手段5〜7と、半導体レーザ1の最小発振波長と最大発振波長と計数結果から測定対象12との距離及び測定対象12の速度を算出する演算装置8と、距離計測優先モードと速度計測優先モードで半導体レーザ1の波長変化率を切り替えるモード設定装置10とを有する。
(もっと読む)
レーダ装置
【課題】受信パルス信号のパルス波形が変化した場合であっても、最適な受信フィルタのフィルタ特性を設定し、高い受信S/N比を実現できるレーダ装置を提供する。
【解決手段】周期的にオンオフを繰り返す送信パルス信号を発生するパルスレーザ光源4と、送信パルス信号を大気中に送信するとともに、地表面3で散乱した送信パルス信号を受信パルス信号として受信する送受光学系6と、受信パルス信号をフィルタリングして、フィルタ後パルス信号を出力する受信フィルタ8と、受信フィルタ8のフィルタ特性を設定する制御部10と、フィルタ後パルス信号に基づいて地表面3までの距離を検出する距離検出部12とを備え、制御部10は、受信パルス信号のパルス波形を予測し、予測したパルス波形に応じてフィルタ特性を設定する。
(もっと読む)
光レーダ装置
【課題】測定対象物が移動体である場合であれ、該移動体への追従性の低下を抑えながら、分解能を向上させることができる光レーダ装置を提供すること。
【解決手段】光レーダ装置の制御回路は、レーザ光源から出射されるパルス光の照射周波数fを、一走査周期当たりの照射パルス数が自然数にならないように設定する。このため、連続する走査周期Tの間で各走査周期Tにおけるパルス光の出射タイミングに、パルス光の照射周期tよりも短い時間Δt(本実施の形態ではΔt=t・1/2)分のずれが生じる。したがって、先の走査における隣り合うパルス光の照射位置p0〜p6の間に、その走査に連続する次の走査におけるパルス光の照射位置p0’〜p6’が設定され、分解能が擬似的に向上する。
(もっと読む)
センサ
【課題】被写体までの距離の計測の精度が悪くなるのを抑制することが可能なセンサを提供する。
【解決手段】このセンサ100は、LED2から照射されて被写体により反射された反射光を検出することにより被写体までの距離を計測するための画素42を備え、画素42は、画素42に蓄積される信号電荷を衝突電離させて増加するための高電界領域422aを含む。
(もっと読む)
光ビーコン
【課題】 投受光器の大型化や構造の複雑化を招くことなく、アップリンク光を送信してきた車載機の位置をより精度よく認識することができる光ビーコンを提供する。
【解決手段】 本発明の光ビーコンは、アップリンク領域を設定すべく、車載機S1からのアップリンク光UOを受光する受光面7a1を有する投受光器を備えている。この受光面7a1の輪郭形状は、アップリンク領域の上流端側に対応する下端縁7a3が、アップリンク領域の上流端を道路Rの車両進行方向に対して略垂直に設定する形状とされている。
(もっと読む)
対象物の検知方法及び光電子装置
【課題】レンジ、分解能、及び/又は構造の奥行きに関して改良を施した、対象物を検知するための方法及び装置を提供する。
【解決手段】光電子装置を用いて対象物を検知する方法に関する。この方法では、光源で生成された光線が光スポットとして対象物に照射され、対象物により逆向き散光及び/又は反射された光線が三角測量理論に従って受信器によって検知され、前記装置と対象物との間の走査距離に関する情報を含む対象物検知信号が出力される。この光線は受信器における光検出器から成るピクセルアレーの結像素子を介して作用する。本方法は前記結像素子が前記ピクセルアレーの前方に配置された個別結像素子の配列のみであり、前記配列が、複数の互いに離れた光スポットの像に対応したピクセルアレー上で受信信号パターンを生成し、前記走査距離に関する情報が前記受信信号パターンから決定される。
(もっと読む)
レーザレーダ装置とその制御方法
【課題】数値演算の負荷の増加や所要計測時間の増加を最小限に抑えながら、遠距離にある計測対象物の空間分解能を高めることができ、或いは近距離であっても特定の対象物の空間分解能を従来以上に高めることができるレーザレーダ装置とその制御方法を提供する。
【解決手段】レーザ発振器12、投光器14、受光器16、距離演算器18及び制御器20を備え、距離演算器18で得られた距離データ9に基づき、計測領域に向けて走査するレーザ光(投光レーザ光2)の走査ピッチを変更する。投光レーザ光2の走査ピッチの変更により、所定の計測領域に向けて空間的に走査される投光レーザ光2の角度ピッチが変更される。
(もっと読む)
レーダ装置
【課題】励起波の揺らぎが変化しても、励起波と変調波との同期関係を保ち、充分な送信波を出力できるレーダ装置を提案する。
【解決手段】周期的に繰り返される各送信周期のそれぞれにおいて、送信波を送信するレーダ装置であって、さらにマスタータイミング制御回路を備え、前記マスタータイミング制御回路は、n番目(nは正の整数)の送信周期について、基準タイミングと励起波との間の経過時間を演算し、また、(n+1)番目の送信周期について、励起波と変調波が、互いに重なった所定の同期関係を保つように、n番目の送信周期における前記経過時間に応じて、励起トリガ信号の発生タイミングを調整する。
(もっと読む)
光波測距方式及び測距装置
【課題】測距精度を向上させると共に測距可能な距離を伸ばすことができ、安価に測距装置を構成することが可能となる光波測距方式及び測距装置を提供する。
【解決手段】第一のPN符号により符号変調された光波を、測距ターゲットに対して発信すると共に第一のPN符号と同一符号で、かつ微小に異なる周波数を有する第二のPN符号を生成して第一のPN符号と第二のPN符号との相関値を低周波の波形信号へと変換し、測距ターゲットにより反射された光波を第二のPN符号を印加した受光素子によって受信し、積分処理して低周波の波形信号へと変換し、送信側相関信号と受信側相関信号との位相差を求め、その位相差から測距ターゲットまでの距離を算出する。
(もっと読む)
測距装置
【課題】物体までの距離が短いか、長いかにかかわらず、当該物体までの距離の計測が精度よく行える測距装置を提供する。
【解決手段】測距装置1は、物体までの距離が長いときには、LD3aがレーザ光を発信してから、PD4aが反射光を受光するまでの経過時間を計測し、この経過時間に基づいてLD3aが発信したレーザ光を反射した物体までの距離を計測する。一方、物体までの距離が短いときには、画像処理部8から入力された、撮像画像における、撮像レンズの光軸位置と、LD3aから発信されたレーザ光の照射位置と、の相対的な位置関係から、物体までの距離を算出する。
(もっと読む)
ビーム照射装置
【課題】2軸駆動方式のビーム照射装置において、目標領域におけるビームの照射位置を、簡素な構成にて円滑に検出できるようにする。
【解決手段】ミラーホルダ10の支軸12の端部にレーザチップ50を配置し、レーザチップ50からのレーザ光を受光するPSD60をベース300側に配置する。こうすると、ミラー面の傾き状態がレーザ光の出射方向にダイレクトに反映される。よって、これを受光するPSD60からの出力をもとに、ミラー13の回動状態を精度良く検出でき、その結果、ビームスキャン位置の検出精度を高めることができる。また、支軸12の端部に小さなレーザチップ50を配する構成であるため、ミラーホルダ10に付加される構成を極めて簡素かつ小型化することができる。よって、ミラーホルダ10の構成の簡素化と、ミラー13の駆動レスポンスの向上が図られる。
(もっと読む)
121 - 140 / 227
[ Back to top ]