
Fターム[5J084EA04]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 分解能向上 (227)
Fターム[5J084EA04]に分類される特許
201 - 220 / 227
高精度の距離測定装置およびその方法
本発明の態様によるターゲットのパラメータ測定システムおよび方法が、ターゲットに少なくとも1つの信号を送信すること、および、ターゲットから送信された信号の少なくとも一部分を受信することを含む。測定されたパラメータは、距離速度または反射率の1つである。送信された信号は、コヒーレントバースト波形のものであり、受信すると、等価時間サンプリング、誤差があったとしても、誤差が最小のAGC、位相計算離散フーリエ変換で処理される。 (もっと読む)
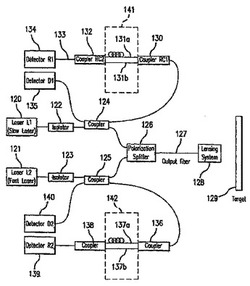
逆チャープFMCWコヒーレントレーザレーダのためのコンパクト光ファイバジオメトリ
【課題】
大きな精度、迅速な測定時間、狭い空間へのアクセス、柔軟性及び信頼性を可能にする実用的な光精密測定システムを提供する。
【解決手段】
本開示は、環境の影響を受けない二重チャープコヒーレントレーザレーダのバージョンを構築するために偏光ダイプレックス方式で偏波保持(PM)光ファイバ構成要素(127)を使用するための、任意の目標(129)までの距離を測定するための方法、及び多様な構成ジオメトリを含む、非接触精密光学素子(12)を提示する。
(もっと読む)
測距装置

【課題】計算過程において大きな値を用いることなく位相差を求めることにより処理負荷の軽減を可能とした測距装置を提供する。
【解決手段】発光源1は強度変調光を対象空間に投光し、光検出素子2は対象空間からの光を受光する。光検出素子2の受光出力は強度変調光における位相が90度異なるタイミングでサンプリング部3によりサンプリングされ4個の検出値が得られる。演算処理部6は、発光源1から投光した強度変調光と光検出素子2で受光した強度変調光との位相差に相当する値を求める。演算処理部6は、強度変調光の1周期を複数に区切った区間を設定するとともに4個の検出値の関係により位相差の存在する区間を判別する区間判別部7と、区間ごとに設定された区間関数で線形になる関数を近似し区間判別部7で判別した区間に応じた区間関数に検出値を代入して位相差に相当する値を求める演算部8とを備える。
(もっと読む)
測地距離データを得る方法及び装置
この発明に従って、一つ又は数個の目標に光信号が発射されて、それにより測地距離データを得る。送信器(1”)及び受信器(4”)等の装置要素が、目標(3a、3b)に基づいて、線形の時間的独立のシステムとして設けられる。そのシステムは、信号s(t)により励起され、そのシステム応答y(t)が記録される。遅れ計又は位相計とは相違して、この距離データは、このシステムの応答における遅れと信号形状から得られる。  (もっと読む)
(もっと読む)
コヒーレントレーザレーダ装置
高信頼性と送信光の高出力化を実現するコヒーレントレーザレーダ装置を得る事を目的とし、光源からのレーザ光をローカル光と送信光に分岐する第1の光カプラ、送信光を変調する光変調器、変調された送信光を増幅する空間型光増幅器、増幅された送信光を目標に照射し、目標からの散乱光を受光する送受光学系、送信光と受信光を分離する送受信光分離装置、ローカル光と分離された受信光を混合する第2の光カプラ、混合光をヘテロダイン検波する光検出器、検波信号を増幅するビート信号増幅器、増幅された信号を処理する信号処理装置、その結果を表示する表示装置を備え、第1と第2の光カプラ及び光変調器を偏波保存型光学素子で構成し、レーザ光源から第1の光カプラを経て空間型光増幅器まで、送受光分離装置から第2の光カプラを経て光検出器まで、第1の光カプラから第2の光カプラまでの各光路を偏波保存型シングルモード光ファイバで接続する。  (もっと読む)
(もっと読む)
手持式レーザ測距装置
【課題】測距精度を高めたパルス混合方法の手持式レーザ測距装置を提案する。
【解決手段】手持式レーザ測距装置(1)において,測定パルス(6)とパルス幅(△t)の参照パルス(7)との間でそれぞれのパルス反復周波数(f1,f2)で測定した少なくとも2つの異なる時間差(T1,T2)を通じて測定対象(4)までの距離(X)を算出するために,マイクロプロセッサ(2)を制御するアルゴリズム部(3)を具える。選択モジュール(5)により,少なくとも最初のパルス反復周波数(f1)を,少なくとも1つの別のパルス反復周波数(f1|)を有する少なくとも最初の周波数量({f}1)から選択し,参照パルス(7)と測定パルス(6)との間で周期(1/f1)に係る相対時間差|T1・f2|の値を,少なくとも周期(1/f1)に係る相対パルス幅|△tf1|の2倍以上の下限値(A)よりも大とする。
(もっと読む)
車載用画像処理装置
【課題】 車外監視手段としてのレーダ2とカメラ1を有する車載システムにおいて、カメラ1により得られた画像における画像処理すべき領域(画像処理エリア)を、レーダ2の測定結果に基づいて適切に設定できる車載用画像処理装置であって、分解能の高いレーダを必要としない車載用画像処理装置を提供する。
【解決手段】 レーダ2によって検出された物体の測定位置に応じて、前記画像処理エリアの中心位置を決定し、レーダ2から出力される電磁波のビームプロファイルに応じて、前記画像処理エリアの大きさを決定する画像処理装置3を設ける。
(もっと読む)
時間差測定装置および測定方法並びに測距装置および測距方法
【課題】 時間差測定装置において、所定の時間差を以て生じる2つのパルス信号の当該時間差を、これら2つのパルス信号を1回の測定により精度よく測定する。
【解決手段】 スタート信号M1(パルス信号)とストップ信号M2(パルス信号)との間の時間差を測定する時間差測定装置であって、π/2の位相差を有する2つの基準信号S1,S2を基準信号発生部41(基準信号発生手段)により発生させ、スタート信号M1およびストップ信号M2の各発生タイミングにおける両基準信号S1,S2の対応振幅値A11,A12およびA21,A22に基づいて、位相差検出部42(位相差検出手段)が両パルス信号M1,M2の発生タイミング間での位相差Δθ(=θstop−θstart)を算出し、検出された位相差Δθおよび基準信号S1,S2の周期Tsに基づいて、時間差算出部44(時間差算出手段)が、両パルス信号M1、M2間の発生時間差Δtを算出する。
(もっと読む)
距離測定装置および距離測定方法
【課題】 対象物までの距離を高い精度で迅速に測定する。
【解決手段】 超短パルスファイバレーザ22からのパルス光を光分岐器24により参照光Aと信号光とに分岐し、信号光についてはスキャニングミラー装置28により対象物10に照射してその反光である散乱光を受光し、参照光Aについては光路長調整部30により光路長を変更する。そして、光路長が変更された参照光Aと散乱光Bとの干渉の程度を干渉信号として差動検出器40により検出し、干渉信号が最大となる光路長に対応する光路長調整部30の調整値からスキャニングミラー装置28から対象物10までの距離を演算することにより、対象物10のパルス光が照射された位置のまでの距離を測定する。
(もっと読む)
光子検知子モジュールと像映装置。
【課題】
レンジ解像度を達成するのに必要な回路速度と密度、レーザーエコーにおけるピコ秒の飛走相違に基づいた小さなターゲット表面変動を明示するのに必要な感度とを具えたレーダー像映システムを提供する。
【解決手段】
ターゲットからの光子反射を発生する光子源と、光子反射に反応して検知子アレイ出力信号を生成する検知子アレイと、検知子アレイ出力信号を受信する積層処理モジュールとを有してなり、処理モジュールが少なくとも2個の積層を有し、各積層が受信検知子アレイ出力信号処理のための少なくとも1個の集積回路チップを有している。
(もっと読む)
複数の出力波長を有するレーザレーダ装置
コヒーレントレーザレーダ(ライダ)装置が記載されている。装置は、単一の波長レーザ源を備える送信部と、前記単一の波長レーザ源の出力からの離散波長の少なくとも2つの成分光ビームを含む、組合わされた光ビームを生成するための(電気光学変調器などの)変換手段と、組合わされた光ビームを遠隔ターゲットに送る送信光学装置とを有する。組合わされた光ビームの各成分光ビームは、単一の波長レーザ源から送信光学装置へ同じ光学経路を移動する。装置は、差分吸収測定をするために使用される。  (もっと読む)
(もっと読む)
測距装置
【課題】 本発明は、測定分解能を変更することのできる測距装置を提供することを目的とする。
【解決手段】本発明の測距装置は、測距対象物に向けて所定の測定用信号を発信する発信部(110)と、前記測距対象物の方向から戻る信号を受信する受信部(120)と、前記発信部及び前記受信部を駆動する測定処理を実行し、前記受信部で受信された信号に基づいて前記測定用信号の発信から受信までの時間を検知すると共に、前記受信部が信号を受信する際の分解能を可変にする制御部(100’)とを備えたことを特徴とする。
(もっと読む)
画像処理装置
【課題】対象空間での光量変化の影響を受けずに対象物を抽出できる画像処理装置を提供する。
【解決手段】発光源2は対象空間に光を照射し、光検出素子1は対象空間を撮像する。画像生成部4は、発光源2から対象空間に照射された光と対象空間内の対象物で反射され光検出素子1で受光される反射光との対応関係によって対象物Obまでの距離を求め、対象空間の各方向に対応する画素値が距離値である距離画像を生成する。微分処理部5は、距離画像から基準平面に対する勾配方向を表す勾配方向値を画素値とする勾配方向画像を生成する。さらに、対象物判定部6は、勾配方向値を用いることにより対象物と背景の境界付近を抽出する。
(もっと読む)
地形点から3次元整合される地表そのもののデジタル標高モデル抽出
多次元対象についての複数の視野を表す複数のフレームを表している複数の未加工の地形点から、デジタル標高モデルを抽出する方法(300)は:表面上方の妨害物により生成されたデータ点をフィルタリング除去することによって表面を探知し(304)、それにより表面を表す複数の表面データ点を提供し;且つ競争的フィルタを用いて表面データ点をフィルタリングし(306)、それによりデジタル標高モデルのデータ点の多次元表面シェルを提供する;ステップ又は作用を有する。上記方法はまた、専用の情報処理システム、又はプログラム可能な情報処理システム(200)によって実行されることが可能であり、あるいは例えばCD−ROM又はDVD等のコンピュータ可読媒体内の命令セットとして実行されることが可能である。 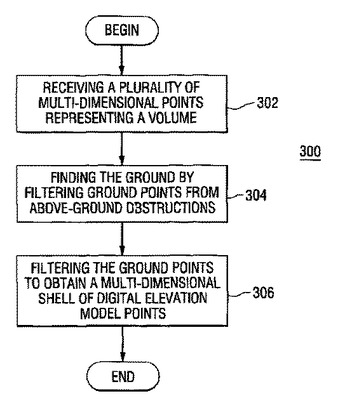 (もっと読む)
(もっと読む)
光ビーム距離計
【課題】正確で、低い電力要求を有し、低コストの可視ビーム距離計を提供する。
【解決手段】距離を測定する“レーザテープ測定装置”は、送信タイミング信号に応じて電磁パルス列を送信するレーザダイオード(43)などの送信機を備える。受信機は、受信タイミング信号(42)に応じて、制御されたタイミングでフィールド内の対象物からの可視電磁パルス列の反射をサンプリングする。受信機はサンプルに応じてサンプル信号を生成し、そのサンプル信号は、反射を生じさせる対象物までの距離を示す。タイミング回路は、送信タイミング信号を送信機に供給し、受信タイミング信号を受信機に供給する。受信タイミング信号は、パルス列中のパルス送信と受信機によるサンプリングとの間の時間が遅延範囲にわたり掃引されるように受信機に反射をサンプリング(50)させる。
(もっと読む)
距離測定装置
【課題】電子回路を構成する電子部品の温度変化や電源変動による電子部品特性の影響を受けないようにし、精度の高い距離測定が行える距離測定装置を提供する。
【解決手段】計測開始状態になると、送波手段2からパルス状のレーザ光を放射し、放射されたレーザ光は分岐手段3で照射波と参照波とに分岐され、照射波は測定対象物6に照射される。測定対象物6からの反射波と参照波は受波手段4に入射し、信号分離手段14に送信される。信号分離手段14では参照波信号または反射波信号のどちらかを通過させてカウンタ15で計数して各信号の周期を計測して、これらの時間から測定対象物までの距離を求める。カウンタ15で計数するときに、参照波信号計測、反射波信号計測、反射波信号計測、参照波信号計測というように参照波信号と反射波信号の計測を順序を入れ替えて交互に行う。
(もっと読む)
3次元画像システムにおける範囲または距離またはレインジ(range)の決定
対象物の画像化のシステムと方法。
検出器アレイの画像が画像面に配設される。検出器の各アレイは内挿部を有しているタイミング回路に接続され内装器はそれが放電する時とは異なった速度で第1のキャパシタを充電する第1の回路を含む。光パルスは対処物の方に送られるので光パルスの一部分は反射パルスとして対象物から反射され光パルスがいつ対象物へ送られたかを示す第1の値が記録される。反射されたパルスは1またはそれ以上の検出器で検出されそのパルスのパルス特性とその反射パルスが検出器にいつ到達したかを表わす第2の値とが記録される。対象物との範囲はその後第1及び第2の値と反射されたパルス特性の関数として計算される。
(もっと読む)
環境認識システムおよび移動機構
【課題】
測距ターゲットが移動しているときや測距システムが移動しているときでも、正確に測距ターゲットを認識する。
【解決手段】
環境認識システム1は、変調されたビーム102を用いて相対的に移動する物体2を認識する。ビーム発射手段12は、ビームを発射する。ビーム走査手段13は、ビームを走査する。物体からの反射ビームをビーム受信手段が16検出する。ビーム受信手段が受信した信号に基づいて距離画像を距離計測手段17が取得する。距離計測手段が取得した複数の画像を比較して距離画像に含まれる物体の歪みを歪み除去手段が除去する。
(もっと読む)
距離計測機能付きランプ装置
【課題】 照明用のLEDを用いて距離計測機能を実現する際に、LEDの寿命を維持しつつ、他のLEDによる送信信号と混同することなく正確に目標とする物標までの距離を計測する。
【解決手段】 距離計測機能付きランプ装置においては、複数個のLEDからなる複数のLED群111,112,・・・,11nを時系列で発光制御して送信信号に時系列パターン情報を付加し、信号抽出・距離算出部42によって送信された時系列パターン情報と合致する反射信号を抽出し、抽出した反射信号を受信するまでの時間差に基づいて、物標までの距離を算出する。
(もっと読む)
光波測距装置
【課題】 安価なAD変換器を用いてAM方式光波測距装置を提供すること。
【解決手段】 光波測距装置は、主発振器11、第1PLL回路12、第2PLL回路13、レーザ駆動回路14およびLASER15からなる光源部10と、APD21および増幅器22からなる受光部20と、第1AD変換器31および第2AD変換器32からなるAD変換手段30と、位相差演算回路41からなる位相差検出手段40と、CPU51からなる距離検出手段50で構成されている。主発振器11から発振された基準電気信号が、互いに異なり、かつ択一的に選択される2種の周波数f1、f2を有し、サンプリング信号が、基準電気信号に対してn回に一度同期し、かつ、サンプリング信号の周波数fSが、基準電気信号の2種の周波数f1、f2に対して平均値を成し、AD変換手段が、サンプリング信号に基づいて、基準電気信号の一周期につき少なくとも一回のAD変換を行なう。
(もっと読む)
201 - 220 / 227
[ Back to top ]