
Fターム[5J084EA04]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 分解能向上 (227)
Fターム[5J084EA04]に分類される特許
61 - 80 / 227
物理量センサおよび物理量計測方法
【課題】物体の物理量を高い分解能で計測し、計測に要する時間を短縮する。
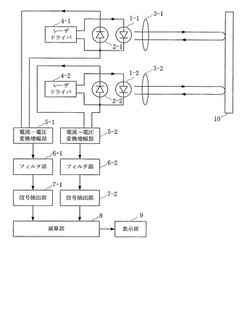
【解決手段】物理量センサは、少なくとも発振波長が連続的に単調増加する発振期間が繰り返し存在するように半導体レーザ1−1を動作させるレーザドライバ4−1と、レーザ1−1と発振波長の増減が逆になるように半導体レーザ1−2を動作させるレーザドライバ4−2と、レーザ1−1,1−2からのレーザ光とその戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2−1,2−2および電流−電圧変換増幅部5−1,5−2と、電流−電圧変換増幅部5−1,5−2の出力信号に含まれる干渉波形の周期を計測する信号抽出部7−1,7−2と、信号抽出部7−1,7−2の計測結果に基づいて物体10との距離および物体10の速度を算出する演算部8とを有する。
(もっと読む)
移動体検出方法及びレーザ距離測定装置

【課題】横断歩道を一団で移動する複数の歩行者の個々の動きを認識でき、横断歩道での歩行者の流れや通行量を把握できる移動体検出方法及びレーザ距離測定装置を提供する。
【解決手段】レーザ光LTを投光する投光部1と、レーザ光LTを走査する走査部と、測定範囲内の歩行者で反射して戻った反射レーザ光LRを受ける受光部2と、受光部2からの受光信号Srにより歩行者の計測データDを作成して発信する信号処理部3と、計測データDを受信して測定結果を出力する制御部6を備え、信号処理部3では、連続して取得する歩行者の計測データDを距離条件でグループ化する処理と、計測データDを複数の高さの閾値で選別する処理と、高さの閾値による高さデータに基づいて歩行者を認識する処理と、歩行者を認識する毎にそれ以前に認識した歩行者との同一性を判定する処理を行う。
(もっと読む)
テラヘルツレーダ装置
【課題】短時間で距離の測定ができるテラヘルツレーダ装置を実現すること。
【解決手段】モード同期周波数制御手段12によってフェムト秒レーザ10、11のモード同期周波数を安定させ、モード同期周波数の差を一定とする。フェムト秒レーザ10からのポンプ光を光伝導アンテナ13に入射させ、テラヘルツコムを発生させる。一方、フェムト秒レーザ11からのプローブ光は、光伝導アンテナ14に入射させ、光伝導アンテナ14に測定物Xにより反射されたテラヘルツコムを入射させることにより、RFコムを発生させる。このRFコムのコムモードを位相差計17により抽出し、抽出したコムモードの位相を測定することにより、測定物Xまでの距離を算出する。複数のコムモードを選択、抽出することで、高ダイナミックレンジな測距が可能となる。
(もっと読む)
小さいフォームファクタの距離センサ
本明細書に開示する主題は、モバイルデバイスからリモートオブジェクトまでの距離、またはリモートオブジェクトのサイズを決定することに関する。
本発明は、回転可能なマイクロリフレクタを回転させてエネルギーをリモート表面に向ける段階であって、前記回転可能なマイクロリフレクタがモバイルデバイス中に配置され、前記回転させることが前記モバイルデバイスに関係する段階と、前記向けられたエネルギーの結果として生じる前記リモート表面からの反射エネルギーに少なくとも部分的に基づいて距離を測定する段階とを含む。  (もっと読む)
(もっと読む)
距離計測装置および距離計測方法
【課題】計測対象までの距離を適切に計測することができる距離計測装置および距離計測方法を提供すること。
【解決手段】計測対象に対して複数の投光ドットからなる投光パターンで光を照射し、前記光が照射された計測対象を撮像することで、前記計測対象までの距離を計測する際に、前記投光パターンを構成する複数の投光ドットを、前記光の光軸と垂直な面上の前記光の照射位置と撮像位置とを結ぶ直線と平行な複数の線であるグリッド線のうち、それぞれ、所定の一対のグリッド線を両端とするものとし、該投光ドットの両端を画定するグリッド線の位置、および前記撮像ドットの撮像画面上の位置に基づき、前記撮像ドットと、前記投光ドットとの対応付けを行い、対応付けた撮像ドットおよび投光ドットに基づいて前記計測対象までの距離を計測する。
(もっと読む)
動線認識システム
【課題】監視領域が広い対象に対して有効な動線認識システムを提供する。
【解決手段】監視領域内における移動体の位置検出をマルチレーザスキャナ方式で行う。そして、このマルチレーザスキャナ方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに監視領域移動体情報としてレーザ動線データベース27に記録する。一方、監視領域内の一部である特定領域内における移動体の位置を、マルチレーザスキャナ方式よりも位置検出の精度が高いカメラ画像方式で行う。そして、このカメラ画像方式により検出された移動体の位置を示す位置情報を、当該位置に移動体が居た時刻を示す時刻情報とともに特定領域移動体情報としてカメラ動線データベース28に記録する。
(もっと読む)
物体を光学的に走査および測定する方法
レーザスキャナ10を用いて物体Oを光学的に走査および測定する方法Oは、標的周波数ω0で変調された発光ビーム18が、発光器17を用いて放射され、レーザスキャナ10の周辺部で物体Oから何らかの形で反射され、または他の形で散乱された受光ビーム20が、受光器21を用いて、多数のサンプルとして測定クロックfMとともに受け取られ、それぞれの場合、少なくとも物体Oからの距離dが、制御および評価デバイス22を用いて、複数の測定点Xに対する多数のサンプルの位相角Φから判定され、距離dを判定するために、時間的に隣接するサンプルの距離差Δdによって生じる位相シフトΔΦを補正して距離dを補正するという手順によって行われる。  (もっと読む)
(もっと読む)
物体検知装置
【課題】距離センサの視野内にドアが存在する場合でも、監視対象である物体の状態をドアの移動と分離して判断可能にする。
【解決手段】距離センサAは、視野領域に存在する物体までの距離を計測して距離画像を生成する装置であり、ドアにより開閉される開口部の上方に配置され視野領域が下方に設定される。距離センサAの視野領域には、走行駆動されて開口部を開閉するドアが含まれる。領域規定手段9は、ドアが出入する領域を含む第1の監視領域と、ドアパネル間の隙間の領域である第2の監視領域と、開口部の外側で開口部から規定範囲内である第3の監視領域とを規定する。また、領域規定手段9は、ドアの開閉の動作に伴って各監視領域の大きさを変化させる。判断手段10は、各監視領域内における物体の存否を判断し、検知出力手段11は、判断手段10の判断結果に応じた出力信号を外部に出力する。
(もっと読む)
光波距離計
【課題】位相差方式の光波距離計による遠距離測定の際に、測距光の空気中の微粒子による反射による影響を少なくする。
【解決手段】複数の変調周波数(F1、F2、F3)で変調された光を出射する発光素子(11)と、該発光素子から出射された光を受光する受光素子(30)と、該受光素子に接続される複数の周波数変換器(32,35,38)と、前記発光素子から出射された光を目標反射物までを往復して前記受光素子に入射する測距光路または光波距離計内部の参照光路を経て前記受光素子に入射する参照光路に切換えるシャッター(28)とを備えた光波距離計において、複数の周波数変換器にはそれぞれ異なる周波数の局部発振信号が加えられ、最も低い周波数(F2−F3+ΔF3)の局部発振信号が、2番目に低い変調周波数(F2)と最も低い変調周波数(F3)の差(F2−F3)といくらか異なる周波数とされる。
(もっと読む)
モデル生成装置、モデル生成方法、モデル生成プログラム、点群画像生成方法および点群画像生成プログラム
【課題】道路を高解像度で表す三次元モデルを生成できるようにすることを目的とする。
【解決手段】画像処理部110はカメラ画像を選択し、所定の処理範囲を処理範囲画像191として抽出し、処理範囲画像191のレンズ収差を補正する。画素点群生成部120はカメラ画像と三次元点群198とに基づいて処理範囲画像191の各画素に対応する三次元座標値および色情報を示す画素点群192を生成する。画素補間点群生成部130は画素点群192に基づいて画素点が低密度である部分を補間する画素補間点群193を生成する。道路三次元モデル生成部140は画素点群192と画素補間点群193とを含んだデータを道路三次元モデル194として生成する。
(もっと読む)
レーザ画像計測装置
【課題】小型で低コスト、かつ高い解像度で高速に対象物の3次、2次元画像を計測できるレーザ画像計測装置を得る。
【解決手段】CW変調信号を発生する発振器1と、レーザ光を発生するレーザ装置2と、変調信号に基づきレーザ光に強度変調をかける変調器3と、レーザ光を走査して照射し、走査角度を発生するレーザ光走査光学系4と、対象物からの反射光を集光する受信光学系5と、レーザ走査範囲における対象物の多点の反射光を受信することができる口径を持ち、反射光を電気信号に変換する受光器6と、前記変調信号の位相と受光器6で得られた反射光の電気信号の位相との位相差を検知する位相検波装置7と、この位相検波装置7によって得られた位相差から前記対象物までの距離を演算する距離演算装置8と、前記走査角度及び距離から2次、3次元画像を生成する画像処理装置9とを設けた。
(もっと読む)
ビーム照射装置
【課題】目標領域におけるレーザ光の走査位置を示す信号を精度良く検出することにより、レーザ光の走査精度を高め得るビーム照射装置を提供する。
【解決手段】S/H回路34は、サンプルタイミングごとに入力電圧信号をホールドし、ホールド電圧信号を減算器35に出力する。減算器35は、入力電圧信号から、ホールド電圧信号を減算した減算電圧信号を、端子32bおよび比較回路36に出力する。A/D変換回路38は、減算電圧信号を、S/H回路34におけるサンプルタイミングに同期してデジタル信号に変換し、PSD処理回路7に出力する。こうすると、A/D変換回路38の分解能が有効に活用されるため、A/D変換回路38から入力される信号に基づいて信号演算回路7bにて位置検出信号を生成することにより、位置検出信号の精度が高められ得る。
(もっと読む)
光センサシステム用の二重電圧電流制御フィードバックループ
光センサシステム用の二重電圧電流制御フィードバックループが提供される。電源が直流(DC)安定化電圧出力を提供する。電流源が直流(DC)安定化電圧出力を受け、光源にスイッチド電流を提供する。電流源が光源を駆動する際は光源への電流を表す電流フィードバックがフィードバックパス上で電源に提供される。電流源が光源を駆動しない場合は直流(DC)安定化電圧出力を表す電圧フィードバックがフィードバックパス上で電源に提供される。  (もっと読む)
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
レーザレーダ装置
【課題】装置の大型化を招くことなく検出物体までの測定距離の検出精度を高め得るレーザレーダ装置を提供する。
【解決手段】光ファイバ74により、レーザ光L0の光軸上に光導入部75が存在する場合に、このレーザ光L0の一部が導光されてフォトダイオード20に出射する。また、レーザダイオード10でのレーザ光L0の発生からこのレーザ光L0の一部が光ファイバ74により導光されてフォトダイオード20により検出されるまで導光時間Tと導光方向距離Xfとに応じて距離補正値Xcが算出される。そして、測定距離Xが距離補正値Xcに基づいて補正される。
(もっと読む)
光学デバイス、この光学デバイスを用いた物体検出方法及び電子機器
【課題】検出対象物の近接を検出できる光学デバイス、これを用いた物体検出方法及び電子機器を提供する。
【解決手段】赤外LEDと、反射光の光量及びスポット位置を示す信号を出力するCMOSイメージセンサと、出力された信号をアンプするとともに信号処理を実施する信号処理部20と、反射率ごとの検出物距離と受光量との関係、第1基準値及び第2基準値を示すデータが格納されたデータベース記憶部30とを備えたものであり、信号処理部20は、スポット位置に基づいて検出物距離を算出する第1信号処理と、検出物距離及び反射光の光量を反射率ごとの検出物距離と受光量との関係と比較して検出物の反射率を求める第2信号処理と、当該反射率が第1基準値と一致するか判断する第3信号処理と、一致する場合に検出物距離が第2基準値と一致するか判断する第4信号処理と、一致する場合に検出対象物の近接を示す信号を出力する第5信号処理とを実施する。
(もっと読む)
物理量センサおよび物理量計測方法
【課題】物体の変位や速度を高い分解能で計測し、計測に要する時間を短縮する。
【解決手段】物理量センサは、物体10にレーザ光を放射する半導体レーザ1と、半導体レーザ1を動作させるレーザドライバ4と、半導体レーザ1から放射されたレーザ光と物体10からの戻り光との自己結合効果によって生じる干渉波形を含む電気信号を検出するフォトダイオード2および電流−電圧変換増幅部5と、電流−電圧変換増幅部5の出力信号に含まれる干渉波形の周期を計測する信号抽出部7と、信号抽出部7で計測された干渉波形の周期を、その直前と直後のうち少なくとも一方において計測された干渉波形の周期の移動平均値と比較することにより、干渉波形の周期を補正し、補正した個々の周期に基づいて物体10の変位と速度のうち少なくとも一方を算出する演算部8とを備える。
(もっと読む)
距離計測装置及び距離計測方法
【課題】距離や反射率の異なる物体の距離を高い精度で計測する。
【解決手段】
次数の異なる照射角度の関数で表現される2種類の照度パタンの照射光を第1ライト21及び第2ライト22に照射させる照射制御機能と、カメラシステム30に各照射光の反射光の撮像データを取得させる撮像制御機能と、得られた各撮像データから種類の輝度パタンを取得させる輝度パタン取得機能と、この2種類の輝度パタンから各画素の指標値を算出する指標値算出機能と、指標値の連続性に基づいて観測領域を識別する観測領域識別機能と、各観測領域の指標値に基づいて、その観測領域を照射する照射光の照射角度を算出する照射角算出機能と、算出された照射角度と、観測領域の撮像角度と、第1ライト21及び第2ライト22とカメラシステム30との位置関係に基づいて、物体までの距離を算出する距離算出機能を実現させる制御装置10を備える。
(もっと読む)
光走査装置及びレーザレーダ装置
【課題】広角度範囲を高速に走査することが可能で且つ角度分解能に優れる光走査装置及びレーザレーダ装置を提供する。水平方向での被走査面との距離に応じた走査を行うことができる光走査装置及びレーザレーダ装置を提供する。
【解決手段】光走査装置は、複数の発光点が光軸と交差する所定方向に離間して配列されたレーザアレイ光源と、複数の発光点の各々から出射されたレーザ光を集光する集光レンズと、集光レンズの焦点位置に配置され且つ集光されたレーザ光を反射して被走査面に照射する可動ミラーを備え、光軸に対する可動ミラーの配置角度が変化するように駆動されるミラーデバイスと、レーザアレイ光源の複数の発光点の各々を被走査面の位置に応じた強度及びタイミングで発光するように独立に駆動制御すると共に、ミラーデバイスの可動ミラーを配置角度の変化によりレーザ光が所定方向に沿って被走査面を走査するように駆動制御する制御部と、を備える。
(もっと読む)
ゲート3Dカメラ
場面までの距離を判定するカメラ。このカメラは、特性スペクトルを有する光のパルス列で場面を照明するように制御可能なVCSELと、感光面と、場面によって光パルスから反射された光を感光面上に撮像する光学素子と、スペクトルにおける光に対して、感光面を選択的にオンおよびオフにゲートするように動作可能なシャッターとを備えている。 (もっと読む)
61 - 80 / 227
[ Back to top ]