
Fターム[5J084EA23]の内容
光レーダ方式及びその細部 (24,468) | 目的 (2,756) | 追尾、追跡 (94)
Fターム[5J084EA23]に分類される特許
21 - 40 / 94
物体監視システム及び方法
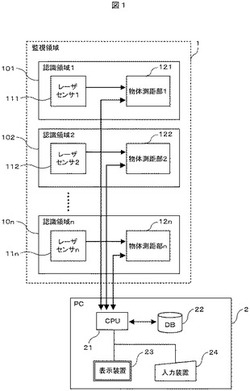
【課題】複数の認識領域間に渡って物体を認識しながら物体の動きを監視することができるシステムを提供する。
【解決手段】複数に分割された認識領域毎に設置された、レーザセンサの照射により対象とする認識領域の測距データを得る測距手段と、測距手段によって取得された測距データと物体特定データDBに格納された情報を照合することにより、物体のサイズを基に支障物を判定する第1判定手段と、第1判定手段による判定の結果、支障物と判定された物体について、認識データDBに格納された物体のデータと照合することにより、複数の認識領域に渡って移動する物体であって、以前に検知された物体と同一の物体である場合には、認識データDBの該物体に関する測距データを追加し、未検知の物体である場合には、物体に関する測距データを認識データDBに新たに登録し、同一の物体及び新規の物体に関する移動に関する情報について軌跡データDBを更新する。
(もっと読む)
三次元及び色彩検出における電荷管理のための方法及び装置

【課題】距離計、画像マッピング、三次元画像キャプチャ、及び人間の色感覚によって限定されない色感覚での画像のキャプチャを含み得る三次元応用例に適したCMOS実装可能な画像センサ、及び、そのような検出器の検出特性を改善する。
【解決手段】オンチップ測定情報を、順番にではなく、ランダムに出力することができ、三次元画像を必要とするオブジェクト追跡、及び他の情報のためのオンチップ信号処理を、すぐに遂行することができる。システム全体は小さく、強固で、かなり少ないオフチップの別個の構成要素を必要とし、かつ、検出信号特性の改善を示す。オンチップ回路は、そのようなTOFデータを使って、場面内の一つのオブジェクト、又は全てのオブジェクト上の全ての点の距離及び速度を、同時に、容易に測定することができる。オンチップ回路はまた、検出センサ内の各画素における検出画像の分光組成を特定することができる。
(もっと読む)
目標追跡装置及び目標判定方法
【課題】目標エコーを確実に追跡可能な目標追跡装置を提供すること。
【解決手段】本実施形態に係る目標追跡装置は、参照光を発生する参照光発生装置2と、参照光を目標に向け照射する光学部品12と、参照光による目標からの反射光を撮像面に結像させることにより目標エコーを撮像するカメラ11と、カメラ11により撮像された画像上で目標候補を抽出し、カメラ11の視軸と光学部品12の角度とに基づいて、画像上での目標エコーの出現予測範囲を算出し、出現予測範囲にある目標候補を目標エコーと判定する制御装置3とを備える。
(もっと読む)
追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法
【課題】 測定される距離の測定誤差を容易に低減できる追尾式レーザ干渉計および追尾式レーザ干渉計の制御方法を提供する。
【解決手段】 追尾式レーザ干渉計1は、移動体に取り付けられたレトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22を有する本体2と、追尾用光学部22からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備えるものであって、制御手段3は、レトロリフレクタRに入射する測定光L2とレトロリフレクタRで反射される測定光L2とを平行とするように検出器222で受光される測定光L21の目標位置Q2を設定する目標位置設定部32と、本体2の姿勢を制御し、レトロリフレクタRで反射された測定光L21を目標位置Q2に入射させる姿勢変更部33とを備える。
(もっと読む)
自動目標検出を有する座標測定装置
目標追跡装置
【課題】安定して反射体を検出することができる目標追跡装置を提供すること。
【解決手段】複数の出射パルスが一定の間隔で出射されるパルスレーザ装置12および出射パルスの波長域に感度を有する撮像装置13が、これらの各指向方向を一致させて備えるとともに、撮像装置13によって得られる画像情報に基づいて生成された指向制御信号に応じて、パルスレーザ装置12および撮像装置13を適宜指向させる指向装置11を具備する目標追跡装置であって、撮像装置13に入射される反射パルスのうち、画像情報から反射体を抽出可能な強度の反射パルスのみを撮像するように撮像装置13を制御する感光タイミング制御部18を具備する。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
追尾式レーザ干渉測長計
【課題】回転機構の回転角度を適切に取得することができる追尾式レーザ干渉測長計の提供。
【解決手段】追尾式レーザ干渉測長計1は、第1の再帰反射体としての測定基準器2と、被測定物Wに取り付けられる第2の再帰反射体としてのターゲット3と、測定基準器2にレーザ光源から出射される光を導くとともに、測定基準器2にて反射された光を出射する本体部4と、測定基準器2を中心として本体部4を回転させる回転機構5と、回転機構5を制御する制御装置6とを備える。本体部4は、測定基準器2にて反射された光を受光し、受光した光の位置を検出する二次元PSDを備える。制御装置6は、回転機構5の回転角度を取得する角度取得部63と、二次元PSDにて検出される光の位置に基づいて、角度取得部63にて取得される回転機構5の回転角度を補正する角度補正部64とを備える。
(もっと読む)
レーザ照準機構
レーザトラッカまたはレーザスキャナとともに使用するための照準デバイスは、トラッカまたはスキャナ制御システムとトラッカまたはスキャナ装置とを含むとよい。トラッカ装置は、レーザを操作する機構へトルクを印加するように構成された複数のモータと、機構の角度位置についてのフィードバック情報をトラッカ制御システムへ送るように構成された複数の角度エンコーダとを含むとよい。トラッカまたはスキャナ制御システムは、照準デバイスが手動調節モードで作動している時にトラッカまたはスキャナ制御システムが複数のモータを制御してユーザにより引き起こされた移動の方向と反対に機構へトルクを付与するように構成されるとよい。 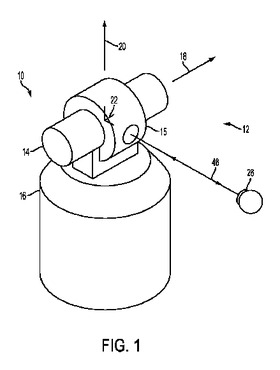 (もっと読む)
(もっと読む)
物標検出装置および物標検出方法
【課題】高い認識精度と、高いリアルタイム性とを兼ね備えた物標検出装置および物標検出方法を提供する。
【解決手段】記憶部4には、対象物の認識に用いるトレーニング用および参照用の特徴量(ポジティプデータ、ネガティブデータ)として、画像中のROIの大きさを考慮して、複数の画像サイズのものが記憶されている。制御部4では、複数の参照用の特徴量のうち、特徴量の距離(サイズ)に対応した特徴量が選択された上で、マッチングが行われる。これにより、ステレオカメラ2から得られたROIの2次元画像の距離(サイズ)が、あらかじめ用意された参照用の特徴量の距離(サイズ)と大きく異なることをなくすることができる。
(もっと読む)
光スイッチを備える絶対距離計
【課題】ドリフトをほとんど発生させることなく、動いているターゲットを正確に測定するADMを提供する。
【解決手段】絶対距離計(ADM)は、放出光を放出する光源を含み、スイッチ制御信号に応答して少なくとも2つの位置間で切り換わる少なくとも1つの光スイッチを有するファイバ交換網200を含み、これらの位置の第1の位置は放出光がファイバ交換網からターゲットの方へ放出され、測定光としてファイバ交換網内へ後方反射される測定モードにし、これらの位置の第2の位置は光ビームがファイバ交換網内の基準光を含む基準モードにする。ADMは、時間的に間隔を空けて多重化した形で測定および基準光を検出し、測定ビームおよび反射された光ビームの電気信号を提供する単一チャネル検出器、それに応答した電気信号を提供する単一チャネル信号処理装置、その電気信号を処理してターゲットまでの距離を決定するデータ処理装置400とを含む。
(もっと読む)
目標捕捉追尾装置
【課題】2次元画像の視野内に存在する目標の3次元形状を取得する際の視軸設定及び対象視野の自由度を向上させ、効率よく目標を追尾する目標捕捉追尾装置を得る。
【解決手段】2次元画像情報を取得するセンサを有する赤外線撮像部と、3次元形状情報を取得するセンサを有するレーザレーダ部とを分離した構成とし、2次元画像情報の視軸及び視野と、3次元形状情報を取得する方向及びその走査範囲とをそれぞれ独立に設定可能にする。そして、赤外線撮像部の視軸は自身の移動方向に一致させつつ、レーザレーダ部の視軸は、目標を捕捉する際には、赤外線撮像部の視軸の方向に一致させるとともに、赤外線撮像部の視野の方位角範囲に一軸走査してその3次元形状情報を取得する。また、目標を追尾する際には、目標の方向に視軸を設定し、これを基準とする限定された範囲を一軸走査して目標の3次元形状を取得する。
(もっと読む)
追跡方法、および、レーザートラッカを有する測定システム
反射器(17)が設けられた標的(9)が、レーザートラッカ(10)を含む測定システムにおいて追跡される。反射器(17)は、通常追跡モードにおいて追跡ユニット(11)により追跡され、特別追跡モードにおいて概観装置(13)により追跡される。追跡ユニット(11)の検出領域と概観装置(13)の検出領域との間にある検出領域を有する捕捉ユニット(12)も存在する。標的(9)を追跡ユニット(11)によっては検出できないが、捕捉ユニット(12)により検出可能である場合、追跡ユニット(11)の方向は、捕捉ユニット(12)による測定に従って制御される。そして、標的(9)を追跡ユニット(11)によっては検出可能である場合、通常追跡モードへの遷移が開始される。標的(9)を概観装置(13)のみにより検出可能である場合、追跡ユニット(11)の方向は、概観装置(13)の測定に従って制御される。  (もっと読む)
(もっと読む)
2次元及び3次元位置検出システム、及びそのセンサ
2次元及び3次元の位置検出システム、ならびにそのシステムで使用されるセンサが開示される。センサは、線形アレイセンサ、及び、光又は他の放射線がセンサの大部分の素子に到達するのを遮るための開口プレートを内包する。相対的な放射線源の方向が、各センサの内の放射されたセンサ素子に基づいて、決定される。センサは、放射線源の位置を推定可能とするために、システム内に組み合わされる。 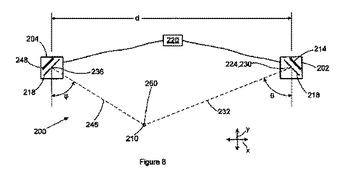 (もっと読む)
(もっと読む)
追尾式レーザ干渉測長計
【課題】入射面のゴミの影響を受け難く、基準球の表面の傷に対してロバストであり、基準球の局所的な真球誤差の影響を受け難くする。
【解決手段】固定位置に配設された透明な基準球614と、移動体に配設された再帰逆反射体(620)と、基準球の中心を中心として回動するように設計されたキャリッジ630と、キャリッジに固定配設され、再帰逆反射体と基準球の間でレーザビーム(642)を往復させる光学系を含み、再帰逆反射体と基準球の間の距離を干渉測長する測長手段(640)と、キャリッジに固定配設され、再帰逆反射体の入射光と反射光の光軸のずれ量に応じた信号を出力する追尾用位置検出手段660と、光軸のずれ量がゼロとなるようにキャリッジの回動を制御する制御部670とを備えた追尾式レーザ干渉測長計において、基準球に入射されるレーザビームが、基準球の中心Oに焦点を結び、入射側と反対の内側球面で反射されるようにする。
(もっと読む)
周波数量子もつれ光子の生成及び検出
紫外線レーザはコヒーレント光を発生し、このコヒーレント光は下方変換されて周波数量子もつれ光子を生成する。量子もつれ光子の各対に関して、第1光子は第1光路に沿って、第2光子は第2光路に沿って、それぞれ伝送される。第1検出器は、第1光路に沿って伝送されるこれらの光子を検出し、第2検出器は、第2光路に沿って伝送されるこれらの光子を検出する。この検出は、シングルフォトン領域で行なわれる。同時計数を検出器の出力に対して行ない、この同時計数には、第1及び第2検出器の出力の立ち上がりエッジを時間窓内で比較することが含まれる。  (もっと読む)
(もっと読む)
物体認識装置
【課題】レーダのスキャン結果からの頭上看板等の誤検出を精度よく判定する。
【解決手段】制御ECU2により、先行車を検出している状態でレーダ5の反射ビームから先行車より前方に検出した静止物体を頭上看板等の誤検出物体と判定し、静止した車両等を頭上看板等と誤って判定することなく、頭上看板等の誤検出を精度良く判定する。
(もっと読む)
距離画像処理装置および撮影装置
【課題】距離画像内で、位置を限定することなく、所望の抽出条件に適合する対象物を特定、抽出する。
【解決手段】距離画像内で、距離値を用いて検出対象となる対象物の候補を抽出する。距離画像内で、近接する距離値が所定以上連続する画素群を対象物候補として抽出する。抽出した対象物候補は、さらにパターンマッチング、速度制限などを用い、絞り込む。得られた対象物候補の中から抽出条件に適合するものを対象物として抽出する。また、抽出条件として、先に抽出したものと同じものを抽出するよう構成してもよい。
(もっと読む)
電波・光波探知装置
【課題】この発明は、簡易な構成で、且つ、電波及び光波の双方の高精度な検知を実現して、探知性能の向上を図り得るようにすることにある。
【解決手段】二軸回りに回動自在に配したジンバル枠10の開口に電波検知系を形成するアンテナ12及び光波検知系を形成するリング状光学系11を同軸的に設けて、アンテナ12の背面側にリング状光学系11で取込んだ光波を集光する光学系17と共に、第1及び第2の光波検知器18,19を配し、電波及び光波の双方を検知するように構成したものである。
(もっと読む)
レーザー照射装置
【課題】 従来、電波センサーでは低高度を接近する目標を捕捉することが難しく、光学センサーでは遠距離の脅威を捕捉することが難しいため、低高度及び超音速で接近してくる目標を遠距離で対処することができないという問題があった。
【解決手段】 高出力連続波レーザー光をパルス変換器によってパルス化し、レーザー放射器から遠方より接近する目標に対してパルス化されたレーザー光を照射して、反射レーザー光を光学センサーで受信する。この受信信号の解析情報を元にレーザー放射器を駆動して目標を追尾し、目標が所定距離に接近した際にパルス動作を停止して、追尾目標に対し高出力連続波レーザ光を照射することにより、低高度目標に対して遠距離で対処することができる。
(もっと読む)
21 - 40 / 94
[ Back to top ]