
Fターム[5L096BA03]の内容
イメージ分析 (61,341) | 入力画像・用途の種類 (5,501) | 特定用途 (3,935) | 検査 (393)
Fターム[5L096BA03]に分類される特許
61 - 80 / 393
エッジ検出方法、エッジ検出装置、及び検査装置
【課題】安定してエッジを検出することが可能なエッジ検出方法を提供すること。
【解決手段】処理部12は、補間画像データに含まれる画素の輝度値に基づいて、同一輝度値の複数の画素について画素の振れ幅を算出し、振れ幅が最も小さい画素の輝度値を算出する。そして、処理部12は、算出した輝度値をエッジ判定値とし、補間画像データに含まれる画素のうち、エッジ判定値と等しい値の画素をエッジとして検出する。
(もっと読む)
複数形状の識別方法およびその装置

【課題】従来の光アナログ法は、画像情報の並列実時間処理には適するが光学装置の小型化が困難で装置構成に利便性を欠いていた。そのために複数画像の識別に、小型で並列画像処理を可能とする光アナログ画像処理法と装置を提供する。
【解決手段】識別物体導入手段または識別物体形状写出手段を、フーリエ変換レンズの前側で前焦点面に限定することなく設置し、多重マッチトフィルタ作成光学系の光路を短縮し、鮮明な光回折パターン取得光学系で多重マッチトフィルタの作成を容易にした。複数形状の同時並列実時間識別の小型簡便な方法と装置を提供した。
(もっと読む)
自動視覚事象検出の方法と装置
【課題】事象の自動視角検出のための方法及びシステムの提供
【解決手段】事象の画像を記録し、表示と、人間的または、自動分析のためにそれらを検索し、事象が検出される場合、外部装置へ同期された信号を送るための事象の自動視覚検出のための方法と装置が公開される。事象とは、撮像装置の視野内のある時間変化条件の中でも特定の条件に相当し、それは、事象が起こる二次元の視野のデジタル画像の取得、および分析に基づき視覚手段により検出され得る。事象は、分析のために画像を得ることが望まれる、まれな、短時間の機械の故障に相当する場合がある。事象は、視野の複数の画像の分析から得られた証拠を考慮することにより検出され、その間に機械構成要素の移動が複数の視点から見られ得る。
(もっと読む)
画像処理装置および方法
【課題】カラー画像上における色の違いがグレーの濃淡に適切に反映されかつ色の欠落がないグレースケール画像を生成することができる画像処理装置および方法を実現する。
【解決手段】カラー画像をグレースケール画像に変換する画像処理装置1は、カラー画像についての、RGB色空間におけるR(赤)、G(緑)およびB(青)の各要素の明度の値を取得する取得手段11と、RGBの各要素別にグレー濃淡の階調の範囲が画定されたグレースケール上において、取得手段11によって取得したRGBの各要素の明度に、当該要素に割り当てられたグレー濃淡の階調の範囲内のグレー濃淡の階調を対応付けることで、グレースケール画像に関するデータを生成する生成手段12と、を備える。
(もっと読む)
画像処理装置
【課題】複数のRGBカラー画像に明度のばらつきがあっても、各RGBカラー画像から抽出色の領域を精度よく取り出す。
【解決手段】画像処理装置1は、RGBカラー画像から予め指定された抽出色の領域を抽出する装置である。画像処理装置1は、色指定部14と、色抽出部12とを備える。色指定部14は、抽出色を指定する。色抽出部12は、抽出色のRGB値の比率を基準比率とし、RGB値の比率が基準比率と同じである特定画素をRGBカラー画像から抽出する。
(もっと読む)
画像処理装置
【課題】抽出色の指定が容易になる画像処理装置を提供する。
【解決手段】エリア選択部は、操作装置からの入力に従ってカラー画像上の任意の領域をサンプリングエリアとして選択する。色座標表示部は、横軸を色相、縦軸を彩度とする二次元のHS色座標30と、明度を縦軸とする一次元のV色座標31とをモニタに表示させる。色座標表示部は、サンプリングエリアに含まれている複数の画素を、各々の色相、彩度、明度に基づいてHS色座標30並びにV色座標31にプロットしたときの、各画素の度数分布を表すヒストグラム32〜34をHS色座標30、V色座標31上に表示する。範囲指定部は、モニタにHS色座標30およびV色座標31が表示されている状態で、操作装置からの入力に従って色座標上に設定される範囲を指定範囲とし、指定範囲の色相と彩度と明度とを持つ色を抽出色として指定する。
(もっと読む)
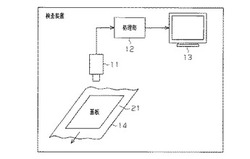
光検出装置、及び光検出装置を備える紙葉類処理装置
【課題】より安定して判定を行うことができる光検出装置、及び光検出装置を備える紙葉類処理装置を提供する。
【解決手段】光検出装置は、紙葉類に対して光を投光する第1の光源部(22)と、紙葉類から光を受光して画像を取得する第1のセンサ部(24)と、前記第1の光源部及び前記第1のセンサ部の両方、またはいずれかの補正要素を調整する第1の調整部(23、25)と、前記第1の調整部に補正要素を調整する毎に前記第1のセンサ部により前記紙葉類を読み取り、複数の画像を取得する画像取得部(10、24)と、前記画像取得部により取得した複数の画像と予め設定される参照データとに基づいて前記紙葉類の分類を判定する判定部(10)と、を具備する。
(もっと読む)
ワーク種別判別装置、及び、ワーク種別判別方法
【課題】同一のラインで多品種のワークをラフな姿勢で配置して搬送する場合でも、搬送工程の後工程でワークを取出すためのワーク位置の算出とワーク種別の判別とを短い処理時間で行うことのできる、ワーク種別判別装置、及び、ワーク種別判別方法を提供する。
【解決手段】ワーク種別判別装置10でワークWの車種を判別する方法は、モデル作成工程(ステップS11)と、姿勢計測用データ作成工程(ステップS12)と、車種判別用データ作成工程(ステップS13)と、撮影工程(ステップS14)と、ワーク位置算出工程(ステップS15)と、データ限定工程(ステップS16)と、車種判別工程(ステップS17)と、取出工程(ステップS18)と、を備える。
(もっと読む)
製品判定方法
【課題】供給される製品形状が経時的に変化しても、当該製品の表裏の判定や異製品の判定を確実に行なう。
【解決手段】原初製品の外形を初期テンプレートとして記憶する第1ステップ(101)と、順次供給される製品の外形を初期テンプレートと比較してその外形の一致率を第1一致率として算出する第2ステップと、第1一致率が第1閾値以上であれば製品を良品と判定する第3ステップと、第1一致率が第1閾値よりも大きい値に設定された第2閾値を下回ったときは初期テンプレートを更新テンプレートに変更する第4ステップと、更新テンプレートと初期テンプレートを比較してその外形の一致率を第2一致率とし、当該第2一致率が第3閾値以上であれば第2ステップに戻り、第3閾値を下回ったときはテンプレート更新を停止して製品判定を終了する第5ステップとを備える。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム、及び欠陥検出装置
【課題】被検査物の撮像画像から円形状の部分を高精度に検出できる画像処理装置、画像処理方法、画像処理プログラム、及び欠陥検出装置を提供すること。
【解決手段】被検査物の撮像画像から輝度の変化点を検出して円外周点候補を検出する円外周点検出手段71と、円外周点候補リスト92を生成する円外周点候補リスト生成手段72と、円外周点候補組合せリスト93を生成する円外周点候補組合せリスト生成手段73と、円中心点候補リスト94を生成する円中心点候補リスト生成手段74と、円中心点候補リスト94のうち有力円中心点候補を選択する有力円中心点候補選択手段75と、有力円中心点候補から各円外周点候補までの距離が所定範囲内の円外周点候補を抽出する正常円外周点抽出手段76と、被検査物の円中心点、及び当該円中心点の半径を求めて、撮像画像90の円を検出する円検出手段77とを備える。
(もっと読む)
廃棄物回収システム及び廃棄物回収車
【課題】ゴミ袋などの廃棄対象物回収の現場での実際作業を考慮して,一度に2個の廃棄対象物を投入できると共に,2個の廃棄対象物を別個に検出することができる検知精度の高い廃棄物回収システムなどを提供すること。
【解決手段】 廃棄物回収車の廃棄物投入口に設けられる廃棄対象物検知部からの情報に基づいて廃棄対象物の投入数を算出し,算出された投入廃棄対象物の数に基づいて廃棄物回収車が廃棄対象物の回収を行った地域のごみ排出量を管理すると共に,廃棄物投入口の中央に設けられた仕切り部材の左右側面に設けられた背景表示手段と,廃棄物回収車の廃棄物投入口の左右に設けられたカメラと,を備え,背景表示手段の画像上に,第1の廃棄対象物検知用ソフト的検知領域と,前記カメラによる撮像画像における背景表示手段の画像より廃棄物投入口の内側の第2の廃棄対象物検知用ソフト的検知領域を設定。
(もっと読む)
焦点ズレ検出装置、焦点ズレ検出方法およびプログラム
【課題】探傷中においても撮像装置の焦点ズレを検知することができ、判定精度の劣化による不良品の流出等を防止する焦点ズレ検出装置を提供する。
【解決手段】本発明の焦点ズレ検出装置は、搬送される被検査体の表面を撮像装置により撮像した画像データに基づいて、表面欠陥を検査する表面欠陥検査装置において、撮像装置の焦点ズレを検出する。かかる焦点ズレ検出装置は、画像データの画像信号を2次元配列された周波数成分に変換する変換演算を行う演算部と、画像データの周波数成分の2次元配列を、所定の規則に基づいて、1次元配列に変換する配列変換部と、1次元配列に変換された周波数成分の一部によって形成される波形の傾きに基づいて、撮像装置の焦点ズレの有無を判定する焦点ズレ判定部と、を備えることを特徴とする。
(もっと読む)
マーカー処理方法、マーカー処理装置、マーカー、マーカーを備える物体、およびマーカー処理プログラム
【課題】撮像された画像から、マーカーの姿勢(位置、回転、傾き)、およびマーカーの大きさに依存しないマーカー処理方法、マーカー処理装置、マーカー、マーカーを備える物体、およびマーカー処理プログラムを提供することを目的としている。
【解決手段】マーカー処理装置100は、画像データ取り込み部101と、二値化部102と、二値化閾値設定部103と、領域ラベリング部104と、領域重心取得部105と、領域重心の多重度取得部106と、マーカー判定部107と、マーカー候補領域リスト記憶部108と、マーカー位置出力部109から構成されている。
(もっと読む)
画像処理装置、画像処理方法、画像処理プログラム
【課題】試料の観察画像の回転を精度よく検出することのできる画像処理技術を提供する。
【解決手段】本発明に係る画像処理装置は、試料の測定箇所を含む広角画像データを介して、測定画像データと基準画像データの間の回転ずれを間接的に補正する。
(もっと読む)
撮影画像における物体座標の対応付け方法、対応付け装置
【課題】1対の撮影画像の各々の座標において、正確な対応付けを行なう際において、作業時間をより短縮できる対応付け方法及び装置を提供することを目的とする。
【解決手段】本発明の対応付け方法は、複数台のカメラで得られた一対の撮影画像間の特徴情報を抽出する第1のステップと、一方の撮影画像から得られた複数個の特徴情報に対して、他方の撮影画像から得られた複数個の特徴情報を対応付ける第2のステップと、前記対応付けられた特徴情報間の視差を示す情報を取得する第3のステップと、前記取得した視差を示す情報に基づく分布を生成する第4のステップと、前記生成した分布に基づいて、視差を示す情報を複数の集団に分離する第5のステップと、前記集団に含まれるデータ数に基づいて、前記集団の良否を判別する第6のステップと、を備える。
(もっと読む)
3次元距離計測装置及びその方法
【課題】曲面のエッジ部分等における形状計測精度の向上を図り正確なギャップ計測を行う3次元距離計測装置及びその方法を提供する提供する。
【解決手段】画像を撮影する複数の撮像装置と、計測対象物が所定範囲で重なるように撮像装置を回転させて光軸を調整する回転駆動装置とを備えた3次元撮影手段と、複数の画像に写された所要計測点の画素の位置対応付け情報を演算する対応付け演算処理手段と、位置対応付け情報と回転駆動装置の回転情報とを用いて計測対象物の3次元形状を演算する3次元形状演算処理手段と、3次元形状から計測対象物の3次元形状が得られない領域の3次元形状を推定する3次元形状推定演算処理手段と、推定結果より計測対象物上において指定された2点の距離計測点の3次元座標を演算する3次元計測座標演算処理手段と、これらの3次元座標を用いて2点間の距離を演算する距離演算処理手段とを備えた。
(もっと読む)
凹凸検査装置、凹凸検査方法
【課題】対象物に照射される光の強さの変動やむらの影響を受けることなく、対象物の凹凸に関するテクスチャを検出することを可能にする。
【解決手段】距離センサ1は対象物10の表面の3次元計測を非接触で行う。距離画像生成部2は、距離センサ1により計測された対象物までの距離を画素値とする距離画像を生成する。距離画像はテクスチャ評価部3に入力され、テクスチャ評価部3は、距離画像の画素値を用いて同時生起行列を生成し、同時生起行列から対象物10の凹凸に関するテクスチャを表す特徴量を算出する。テクスチャ評価部3で算出した特徴量は表示装置6に出力される。また、テクスチャ評価部3は、距離画像からテクスチャを求める凹凸ではない距離変化の情報をノイズとして除去した修正距離画像を生成し、修正距離画像の画素値から対象物の凹凸に関するテクスチャを表す特徴量を算出する機能を有する。
(もっと読む)
画像処理方法および画像処理装置
【課題】画像内に存在する複数のパターンを高速に探索することができる画像処理装置および画像処理プログラムを提供する。
【解決手段】本実施の形態に係る画像処理方法は、予め登録されたモデルと一致する領域を入力画像からサーチするパターンマッチング処理に向けられる。本画像処理方法においては、モデルを示すエッジコード画像と、モデルを示すエッジコードヒストグラムとが予め登録される。なお、エッジコード画像およびエッジコードヒストグラムの詳細については後述する。その上で、対象の入力画像に対して、エッジコードヒストグラムを用いて、モデルと一致する可能性がある領域(候補点)をサーチ(粗サーチ)する。続いて、エッジコード画像を用いて、当該候補点を中心としてモデルと一致する領域をサーチ(詳細サーチ)する。
(もっと読む)
疵学習装置、疵学習方法、及びコンピュータプログラム
【課題】 疵検査対象物に生じている疵の特徴量から疵種を判別するための学習モデルを、疵種の正解データが与えられた疵の特徴量のデータを用いて更新するに際し、多数の疵のデータから学習モデルの更新に適したデータを選択できるようにする。
【解決手段】 疵種「CL1」、「CL2」を完全に分離する特徴量の値の範囲の組と、疵種「CL1」、「CL2」とを相互に対応付けるための複数個(L個)の部分特徴量空間の集合として学習モデルを生成する。そして、入力された疵データのうち、特徴量空間において、学習モデルにおける疵種の判別結果に対する確信度が低い疵データだけを用いて、学習モデルを更新する。
(もっと読む)
色シェーディング評価装置
【課題】光学機器における色シェーディングを定量的に評価する装置および方法を提供する。
【解決手段】評価対象となる光学機器で既知の被写体を撮影した画像を電子データ化した上で、この画像データを縦横のメッシュ状に分割し、分割画像データごとに色データを算出する。メッシュごとの彩色の度合いの平均値である色付きと、メッシュごとの彩色の度合いの最大値である色バランスとを用いて、光学機器の色シェーディングを定量的に評価する。
(もっと読む)
61 - 80 / 393
[ Back to top ]