
Fターム[5L096HA07]の内容
Fターム[5L096HA07]の下位に属するFターム
所定のパターンを見付けるもの (655)
与えられたパターンの種類を特定するもの (747)
Fターム[5L096HA07]に分類される特許
41 - 60 / 516
特徴領域抽出装置、特徴領域抽出方法、及びプログラム
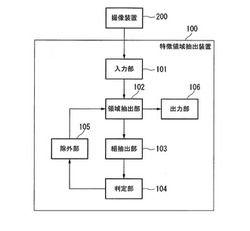
【課題】車両の検知に特有の誤検知を防止する。
【解決手段】領域抽出部102は、画像から二輪車の特徴部分に類似する領域と四輪車の特徴部分に類似する領域とを抽出する。組抽出部103は、領域抽出部102が抽出した領域の中から中心位置同士の距離が所定の閾値以下となる領域の組を抽出する。除外部105は、組抽出部103が抽出した組を構成する領域のそれぞれに異なる車両の特徴部分が含まれる可能性が低い場合に、当該組の構成する領域の一方を抽出結果から除外する。
(もっと読む)
階層型構成要素ベースの物体認識

【課題】相互に相手を基準に移動可能な任意数の部分からなる可能性のある、イメージ中の物体を認識するための方法を提供する。
【解決手段】オフライン段階では、本発明は一連の例示イメージから単一の物体の部分の相対的な動きを自動的に学習し、単一の物体の部分の記述、部分間の関係、および効率的な検索戦略を組み込んだ、階層型モデルを構築する。これは、例示イメージ中の単一の物体の部分のポーズ変化を解析することによって実行される。ポーズは、物体認識に関する任意の類似性尺度によって取得できる。オンライン段階では、本発明は、階層型モデルを使用して検索イメージ中の物体全体を効率的に見つける。オンライン段階中には、物体の有効なインスタンスのみが見つけられ、すなわち、物体の部分は全体イメージ中ではなく、効率的な検索を容易にしてその後の妥当性検査ステップを不要にする階層型モデル内の物体部分間の関係によって定義される、パラメータスペースの制限された部分でのみ検索される。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】 所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】 個々の物品の基材上に、基材とは異なる光学反射特性を有する微細物質または特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読取り、所定の画像処理を施して微細物質の分布位置情報を抽出し、基準特徴点データとして記憶部102に記憶しておく。識別対象となる物品を上述の読取りの際と同様の手法で読取り、同様の画像処理を施して微細物質の分布位置情報(対象物特徴点データ)を抽出する。そして、抽出した対象物特徴点データと記憶されている基準特徴点データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
情報処理装置、物体認識方法、プログラム及び端末装置
【課題】画像が撮像される際の照明条件が変化する状況において画像に映る物体を精度よく認識すること。
【解決手段】2つ以上の画像の特徴量を記憶するデータベースであって、各画像に映る物体を識別するための識別情報と当該物体が撮像された際の照明条件に関する属性値とが各画像の特徴量に関連付けられている上記データベースと、撮像装置により撮像された入力画像を取得する取得部と、上記入力画像から決定される特徴量を上記データベースにより記憶されている各画像の特徴量と照合することにより、上記入力画像に映る物体を認識する認識部と、を備え、上記データベースにより記憶される特徴量は、互いに異なる照明条件で同じ物体を撮像した複数の画像の特徴量を含む、情報処理装置を提供する。
(もっと読む)
画像処理システム、顔情報蓄積方法、画像処理装置及びその制御方法と制御プログラム
【課題】顔情報そのものを蓄積せずに、顔のパーツ、属性情報および関連情報で顔情報の特徴を蓄積して照合し、記憶媒体や通信媒体のリソースの有効利用を図る。
【解決手段】撮影された画像から顔情報を検出して分析するための画像処理装置であって、撮像された画像から顔領域を検出する顔検出手段と、検出した前記顔領域から顔のパーツを検出するパーツ検出手段と、検出した前記パーツの領域、前記パーツの周辺領域、前記顔領域の他の部分領域の少なくとも1つの領域における、色を含む属性を分析する属性分析手段と、前記顔検出手段が検出した前記顔領域と関連付けられる関連情報を取得する関連情報取得手段と、前記パーツと、前記属性と、前記関連情報とを検索可能に関連付けて蓄積する蓄積手段と、を備えることを特徴とする。
(もっと読む)
解析対象画像の中から参照画像に基づく物体を認識する画像解析装置、サーバ、プログラム及び方法
【課題】参照画像中に、同一類似の局所特徴量の特徴点が複数存在する場合であっても、解析対象画像の中から参照画像に基づく物体を認識する画像解析装置等を提供する。
【解決手段】画像解析装置は、解析対象画像から多数の特徴点を抽出し、その中で類似した局所特徴量を持つ特徴点の空間的な分布を解析し、その分布密度に基づいた認識対象物体のおおまかな位置を推定する。そして、当該位置推定によって得られた領域の周辺領域において参照用画像とのマッチングを再度実行し、認識対象物体を特定する。その結果得られる参照画像に基づく物体の識別情報と、解析対象画像における当該物体の位置情報とを対応付ける。
(もっと読む)
画像処理装置、画像処理方法および画像処理プログラム
【課題】画像内の物体を安定して追尾すること。
【解決手段】画像処理装置100は、追尾対象となる物体の複数の部分テンプレートと、テンプレート画像とを比較して、領域毎の相関値を算出する。画像処理装置100は、相関値に基づいて、部分テンプレートに類似する画像領域を仮説領域として抽出する。画像処理装置100は、複数の仮説領域を重複しないように組み合わせた全体仮説を生成し、相関値や誤差を基にして、全体仮説の評価値を算出する。画像処理装置100は、評価値を基にして、複数の全体仮説から最適な全体仮説を判定する。
(もっと読む)
ロボット装置、位置姿勢検出装置、位置姿勢検出プログラム、および位置姿勢検出方法
【課題】平面画像により表現された対象物体の、立体空間における位置および姿勢を高精度に検出する。
【解決手段】対象物体を撮像して画像データを生成する撮像装置11と、撮像装置11を可動に支持するロボット本体12と、リファレンスに対する撮像装置11からの視線方向ごとに、視線方向に対する面のテンプレート画像データとロボット座標系における面の位置および姿勢を表す情報とロボット座標系における撮像装置11の位置および姿勢を表す情報とを有するテンプレート情報を記憶するテンプレート情報記憶部と、撮像装置11が生成した画像データに含まれる対象物体の画像から可視である面を検出し、テンプレート情報記憶部から、可視である面に対応するテンプレート情報を読み込み、テンプレート情報に基づいてロボット座標系における対象物体の位置および姿勢を表す位置姿勢データを生成する位置姿勢データ生成部とを備えた。
(もっと読む)
顔検出方法および顔検出装置、ならびに、プログラム
【課題】顔検出の検出結果に基づき対象人物が口を覆う用具を装着しているか否かを判定可能とする。
【解決手段】画像から顔を検出し、検出された顔から口の特徴点を抽出して口の縦幅および横幅を求め、口の縦幅および横幅と、口について予め求められた標準の縦幅および横幅との第1の差分および第2の差分をそれぞれ算出し、第1および第2の差分の絶対値を取った値に対して閾値判定を行う。第1の差分が第1の閾値Th1未満であり、且つ、第2の差分が第2の閾値Th2未満である場合に、口が覆われていないと判定する。また、第1の差分が第1の閾値Th1である場合において、第2の差分が第2の閾値Th2以下で、且つ、第3の閾値Th3を超える場合には、口を開けた状態が検出されたものと見做し、口が覆われていないと判定する。
(もっと読む)
姿勢推定装置、姿勢推定システム、および姿勢推定方法
【課題】関節を有する物体の姿勢を高精度に推定することができる姿勢推定装置を提供すること。
【解決手段】姿勢推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢の推定を行う装置であって、姿勢毎に、部位の位置を規定する基準モデルを格納する基準モデル格納部140と、姿勢毎に、密集部分の重みが小さくなるように部位に対して重み付けを行う重み付け算出部150と、重み付けを適用して基準モデルと物体とを比較することにより、物体の姿勢を推定する姿勢推定部160とを有する。
(もっと読む)
パターンマッチング装置、及びコンピュータープログラム
【課題】本発明は、複数層を含むパターン画像のように、異種の特徴を持つ複数の領域が含まれる画像に対するパターンマッチングを高精度に行うパターンマッチング装置等の提供を目的とする。
【解決手段】上記目的を達成するために本発明では、設計データ、或いは撮像画像に基づいて形成されたテンプレートを用いて、対象画像上でパターンマッチングを実行するパターンマッチング装置であって、異なる複数の対象パターンを含む第1のテンプレートを用いて、第1の対象画像に対するパターンマッチングを実行し、第1の対象画像から、特定パターンを含む領域の情報を除外して第2の対象画像を作成し、当該第2の対象画像と、前記特定パターン以外のパターン情報を含む第2のテンプレートとの間の類似度判定を行うパターンマッチング装置を提案する。
(もっと読む)
画像処理装置及び画像処理方法
【課題】画像感性値の処理に関する画像処理装置及び画像処理方法を提供する。
【解決手段】処理対象画像と、所定の感性値が定められた複数の訓練画像との各々のマッチング度を算出するマッチング度算出部と、前記複数の訓練画像から、前記処理対象画像とのマッチング度が最高となる所定数の訓練画像を抽出し、該所定数の訓練画像の選定された感性種別に関する感性値に基づいて、前記処理対象画像の感性値を算出する感性値算出部と、を含む画像処理装置が提供される。
(もっと読む)
物体識別システムおよび方法、並びに、特徴点位置抽出システムおよび方法
【課題】物体にタグを装着することなく、複数視点からのカメラ画像を対象にしつつカメラの視点方向に依存しない物体識別を行う。
【解決手段】物体識別システム1は、複数視点から物体(照合用物体、対象物体)を撮影した画像データから物体の複数の特徴点を抽出する特徴点抽出部22と、複数の特徴点から幾何学的不変量が算出可能な特徴点を選択する特徴点選択部23と、選択された特徴点の位置から幾何学的不変量を算出する幾何学的不変量算出部24と、照合用物体についての幾何学的不変量と対象物体についての幾何学的不変量とを照合することで対象物体を識別する識別部26と、を備える。
(もっと読む)
対象物画像判定装置
【課題】三次元空間での対象物の像の存在を判定する対象物画像判定装置において、撮像される画像毎に投影処理を行い設置物による非隠蔽部分を求めるのは処理負荷が大きい。
【解決手段】時刻毎の画像にて対象物を追跡する動作に先だって事前処理を行う。事前処理では、監視画像にて対象物が設置物により隠蔽されずに投影される推定投影領域を、空間内の各位置に対象物モデルを配置して求め、当該位置と推定投影領域とを対応付けた推定投影領域データ42を予め記憶部4に保存する。追跡処理では対象物隠蔽推定部530は推定投影領域データ42を参照し、注目対象物の予測位置での推定投影領域を取得する。尤度算出部531及び物体位置算出部532は、推定投影領域の画像特徴から対象物の像の存在を判定する。
(もっと読む)
姿勢状態推定装置および姿勢状態推定方法
【課題】関節を有する物体の姿勢状態を高精度に推定することができる姿勢状態推定装置を提供すること。
【解決手段】姿勢状態推定装置100は、関節により接続された複数の部位を有する物体を撮影した画像データに基づいて物体の姿勢状態の推定を行う装置であって、画像データから、部位の部位候補の抽出を行う部位候補抽出部140と、部位候補抽出部140により部位候補が抽出されなかった未抽出部位の一部が、部位候補抽出部140により部位候補が抽出された既抽出部位の陰になっているものと推定して、画像データから未抽出部位の部位候補の抽出を行う補完部位候補抽出部160と、抽出された部位候補に基づいて、物体の姿勢状態の推定を行う姿勢状態推定部170とを有する。
(もっと読む)
物体認識処理装置及び物体認識処理方法
【課題】バーコードラベルや無線タグが付されていない商品を画像認識処理により短時間で精度良く認識できるようにする。
【解決手段】撮像部10より撮像された認識対象物のカラー画像信号について、認識処理部20において、第1の認識処理部22により、上記カラー画像信号からHSV色空間に変換して、H(色相)情報とS(彩度)情報のカラーヒストグラムを作成し、上記認識対象物の第1の特徴情報として、予め作成されている基準のカラーヒストグラムと比較することにより上記認識対象物を認識し、また、第2の認識処理部23により、上記カラー画像信号に含まれる認識対象物の輝度情報からSIFT特徴量を抽出し、K−means法によるクラスタリングに対応したクラスを横軸としたヒストグラムを作成し、上記認識対象物の第2の特徴情報として、予め作成されている基準のヒストグラムと比較することにより上記認識対象物を認識する。
(もっと読む)
異常検知装置
【課題】拘束シーンのように複数人が密着して生じる異常を検知するのは困難だった。
【解決手段】互いに姿勢が異なる人物の形状を模した複数の姿勢別人物モデル211と、背景画像210とが予め記憶部21に記憶されている。撮像部20は監視空間を撮像して監視画像を出力し、変化領域抽出部220は背景画像210との比較により監視画像から変化領域を抽出し、姿勢判定部222は姿勢別人物モデル211のうち2以上を重ね合わせた複合形状を変化領域と形状比較して適合度を算出し、適合度が所定基準を超える姿勢の組み合わせを判定する。異常判定部223は姿勢判定部222により判定された姿勢の組み合わせが予め設定された異常な組み合わせと合致するときに異常信号を出力する。
(もっと読む)
ピッキングシステムおよびピッキング方法
【課題】乱雑に配置された複数の薬品等のピッキング対象物体の中から各ピッキング対象物体を認識してピッキングすることが可能なピッキングシステムおよびピッキング方法の提供。
【解決手段】複数のピッキング対象物体を含む画像を入力する画像入力手段10と、複数のピッキング対象物体について予め各ピッキング対象物体の種類ごとにテンプレート画像を記憶またはテンプレート画像の面積を記憶するテンプレート記憶手段16と、画像入力手段10により入力された画像からピッキング対象物体領域を抽出する対象物体領域抽出手段12と、各ピッキング対象物体領域に外接する矩形の面積とその各ピッキング対象物体領域の面積との差の第1項と、各ピッキング対象物体のテンプレート画像の面積と各ピッキング対象物体領域の面積との差の第2項とを含む評価関数により各ピッキング対象物体を識別する識別手段15とを含む。
(もっと読む)
把持物体認識装置、把持物体認識方法、及び把持物体認識プログラム
【課題】撮影等により得られた映像や画像に含まれる人物が把持する把持物体等を高精度に認識する。
【解決手段】映像又は画像に含まれる人物が把持している物体を認識する把持物体認識装置において、前記映像又は画像に含まれる少なくとも1人の人物の人体領域を検出する人体領域検出手段と、前記人体領域検出手段により得られる人体領域から手先領域を検出する手先検出手段と、前記手先検出手段により得られる手先領域に対応した手先の位置情報に基づいて、把持物体を検出する把持物体検出手段とを有することにより、上記課題を解決する。
(もっと読む)
画像検索装置、および画像検索プログラム
【課題】ぼかし画像の算出を高速化し、特徴点および特徴量の検出に要する演算時間および演算量を低減する。
【解決手段】画像検索装置であって、画像ファイルおよび検索画像を入力する画像入力手段101と、画像ファイルおよび前記検索画像を記憶する記憶手段102と、画像ファイルおよび検索画像の特徴点および特徴量をそれぞれ抽出する特徴量抽出手段103と、検索画像の特徴量に一致または類似する画像ファイルの特徴量を検索する検索手段105と、検索画像の特徴量に一致または類似する前記画像ファイルの特徴量に対応する特徴点に所定の印を設定して表示する表示手段106とを有し、特徴量抽出手段103は、ぼかしフィルタを間引きして演算してぼかし画像を生成する。
(もっと読む)
41 - 60 / 516
[ Back to top ]