
国際特許分類[A01D67/00]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 収穫;草刈り (6,752) | 収穫機または刈取機に特に適合した機台または機枠 (967)
国際特許分類[A01D67/00]の下位に属する分類
国際特許分類[A01D67/00]に分類される特許
11 - 20 / 865
走行車両
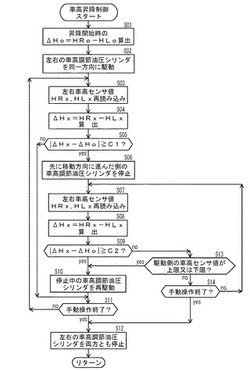
【課題】手動操作によって走行機体の車高を昇降させる場合において、左右のローリングアクチュエータにかかる負荷の大小に拘らず、走行機体の左右傾斜角度をできるだけ一定に維持した状態で、走行機体の車高を昇降できるようにする。
【解決手段】現時点の左右の車高センサ375,376値の差ΔHxと昇降開始時の左右の車高センサ375,376値の差ΔHoとの間の差分の絶対値|ΔHx−ΔHo|が予め設定された第1昇降基準値C1を上回ると、先に移動方向に進んだ側のローリングアクチュエータ38を停止させ、他方のローリングアクチュエータ38の駆動を継続させる。
(もっと読む)
コンバイン

【課題】コンバインにおける、サンバイザーをより安定的に支持することができる支持構造を提供することを課題とする。
【解決手段】エンジンルーム10の上方に座席シート12が配置され、当該座席シート12の後方にグレンタンク8が配置され、座席シート12の上方にサンバイザー20が配置されるコンバインにおいて、サンバイザー20を支持する支柱21L・21Rが、座席シート12とグレンタンク8との間に立設され、支柱21L・21Rの下端がエンジンルーム10を成す構造体(本実施形態ではフレーム14)により支持され、支柱21L・21Rの上下中途部がグレンタンク8により支持される構成とした。
(もっと読む)
コンバイン
【課題】刈取穀稈を刈取搬送装置側から円滑に受け継ぐことができるものでありながら、刈取搬送装置を機体の左側にオープンさせることができるものとする。
【解決手段】刈取搬送装置(3)に備えた穀稈搬送装置(27)から刈取穀稈を受け継いで搬送する受継ぎチェン(11)とフィードチェン(10)を設け、受継ぎチェン(11)を、穀稈搬送装置(27)の搬送速度に同調した速度で刈取搬送装置(3)側から駆動する構成とし、クローラ(18)を駆動するミッションケース(40)の左側に、刈取搬送装置(3)を車体(1)側に支持する刈取フレーム(3a)を配置し、刈取フレーム(3a)を車体(1)の前方の位置から車体(1)の左側の位置へ回動させることで刈取搬送装置(3)が機体の左側にオープンする構成とする。
(もっと読む)
コンバイン
【課題】エンジンの燃料消費を抑制するとともに騒音の低減化を図ることができるものでありながら、メンテナンス作業の頻度を少なくすることができ、しかも、伝動構造の簡素化を図ることが可能な状態で発電機を駆動することができるコンバインを提供する。
【解決手段】走行装置、刈取処理部及び脱穀部を駆動する電動モータM1,M2,M3と、車体に搭載されたエンジン80にて駆動される発電機81とが備えられ、発電機81にて発電した電力にて電動モータM1,M2,M3を駆動するように構成され、エンジン80が、車体横幅方向に向かう軸芯周りで回転する出力軸を備える状態で備えられ、発電機81が、車体横幅方向に向かう軸芯周りで回転する発電用回転軸を備えるとともに、エンジン80と車体横幅方向に沿って並ぶ状態で備えられている。
(もっと読む)
走行車両
【課題】走行機体の前後左右の傾斜姿勢を車高操作具や傾斜操作具の手動操作で変更するにおいて、これら操作具の手動操作を手軽に行えるようにする。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177とを備える。走行機体1上にある運転座席12の前方に配置された操向操作具11と、操向操作具11を支持する操向コラム46とのうちいずれか一方に、走行機体1の車高を変更操作する車高操作具57を設け、他方に、走行機体1の傾斜姿勢を変更操作する傾斜操作具56を設ける。
(もっと読む)
走行車両
【課題】ローリングアクチュエータやピッチングアクチュエータを可動限界まで動作させて走行機体にねじれを生じさせたり、走行機体を極端な姿勢にしたりすることがなく、安定した姿勢制御を実現できる走行車両を提供する。
【解決手段】本願発明の走行車両は、左右の走行部2にて支持された走行機体1と、走行機体1の左右方向の傾斜姿勢を変更するローリングアクチュエータ38と、走行機体1の前後方向の傾斜姿勢を変更するピッチングアクチュエータ177と、各アクチュエータ38,177の駆動を制御するコントローラ371とを備える。コントローラ371には、走行機体1における各走行部2側の姿勢に関する一対の姿勢データML,MRを格納する。コントローラ371は、各アクチュエータ38,177による走行機体1の姿勢変更の可否を両姿勢データML,MRに基づき決定する。
(もっと読む)
コンバイン
【課題】刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができるコンバインを提供すること。
【解決手段】
機体本体を変速操作する変速操作手段と、刈取部を昇降操作する刈取部昇降操作手段と、掻込リールを昇降操作するリール昇降操作手段と、をそれぞれ単独で操作部に配設しているので、刈取昇降レバーの操作と独立して掻込リールの下降操作をすることができ、刈取部と掻き込リールでの挟み込みをすることができる。そして、刈取部と掻き込リールでの挟み込みをすることで刈り終い時の穀稈が刈取部から脱落するのを防ぐ効果を有する。
(もっと読む)
コンバイン
【課題】詰まった穀稈を排出するために掻込オーガを逆転させるコンバインを提供すること。
【解決手段】
自走可能な機体本体の前方に刈取部を昇降自在に取り付け、刈取部には圃場に植立した穀稈を掻き込む掻込リールと、掻込リールにより掻き込まれた穀稈を刈り取る刈刃と、刈刃により刈り取った穀稈を掻き込む掻込オーガと、掻込オーガにより掻き込まれた穀稈を機体本体の脱穀部に搬送する搬送体とを設けたコンバインにおいて、機体本体に設けた原動機部からの動力は、搬送体に設けた搬送駆動軸を介してカウンタ軸に伝達され、カウンタ軸から掻込リール、刈刃及び掻込オーガに伝達されるようにし、カウンタ軸は、搬送体の側方でかつ掻込オーガの背後に形成される空間内に配置して、カウンタ軸に掻込オーガを逆転させる逆転装置を配置したことを特徴とするコンバインである。
(もっと読む)
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの姿勢制御装置
【課題】本発明は、機体の水平制御に用いられる油圧シリンダを含む機構を機体に対してコンパクトに配置するコンバインの姿勢制御装置を提供する。
【解決手段】機体フレーム2において機体左右方向に配置される軸部17,22に、当該軸部17,22周りに回動しトラックフレーム10を昇降操作する昇降アーム19,24,26と、軸部17,22を回動させて昇降アーム19,24,26を操作する操作アーム18,23とを機体前後のうちの同方向に取り付け、軸部17,22から同方向への操作アーム18,23の長さF1,R1を軸部17,22から同方向への昇降アーム19,24,26の長さF2,R2以下に設定するとともに、操作アーム18,23と機体フレーム2に亘ってピストンロッド28a,29aを下方に出退させて操作アーム18,23を軸部17,22周りに回動させる油圧シリンダ28,29を鉛直方向に配置した。
(もっと読む)
11 - 20 / 865
[ Back to top ]