
国際特許分類[A63H3/36]の内容
生活必需品 (1,310,238) | スポーツ;ゲーム;娯楽 (86,983) | 玩具,例.こま,人形,フープ,積木 (4,067) | 人形 (737) | 細部;付属品 (329)
国際特許分類[A63H3/36]の下位に属する分類
人形の眼 (48)
人形の髪またはかつら;まつ毛;まゆ毛 (23)
手足の連結部 (58)
人形への部品のとりつけ,例.自動の眼 (16)
人形または動物玩具のための台わく,台,または車輪 (15)
人形の家,家具,またはその他の装備品;人形の衣類 (28)
国際特許分類[A63H3/36]に分類される特許
111 - 120 / 141
人形用眼球の取付構造該取付構造を備えた人形用頭部該人形用頭部を備えた人形
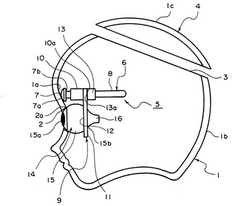
【課題】簡単かつ任意に眼球の視線を調整できると共に、眼球の交換が容易かつ商品価値を低下することなく行い得る人形の眼球取付構造を提供する。
【解決手段】内部中空状に形成された人形用頭部の貫通した眼球露出穴2に、該頭部内部から眼球を取り付ける構造であって、眼球露出穴位置近傍の頭部内面に先端の固定部7を固定すると共に後頭部1b方向へ向けて突設される取付部本体6と、該取付部本体に対し摺動可能に備えられ、眼球14を保持すると共に保持される眼球の後方が臨む嵌め合い部12を備えた眼球押え部9と、該眼球押え部の後方から前記取付部本体に摺動可能に備えられるカシメ部13とで構成されている。
(もっと読む)
ロボットによる任意形状物体の把持方法

【課題】 視覚センサを有し、ロボットハンドによって任意形状物体を適切に把持することを可能とするロボットによる任意形状物体の把持方法を提供する。
【解決手段】 視覚センサで取得した画像情報を基にして把持対象物を所定の単純形状に当てはめ(ステップS1)、その大きさと向きを求め(ステップS3)、種別に応じてその単純形状の向きと大きさからロボットハンドの把持姿勢を設定する(ステップS11、21、31)。求めた把持姿勢からロボットハンドの手首位置を算出し(ステップS13)、逆運動学解析により、アーム、胴体の目標姿勢を求め(ステップS15)、モータを制御して目標姿勢を得(ステップS17)、把持を行う(ステップS19)。
(もっと読む)
関節駆動機構およびロボットハンド
【課題】関節駆動機構を軽量かつ小型にして、人の手サイズであっても多自由度を有し複雑な動きをすることができるロボットハンドを提供することを課題とする。
【解決手段】 ロボットハンド指機構の関節部を駆動する駆動素子13に、直動式アクチュエータを用いて、把持力を発生する方のアクチュエータ13bの出力は大きく設定し、把持力に関係しない方のアクチュエータ13aは出力を小さく設定することで、ロボットハンドの軽量、小型化を実現する。
(もっと読む)
人形玩具の足部構造及び当該足部構造を備える人形玩具
【課題】 平坦な床面において安定した状態で自立させることができる人形玩具の足部構造を提供する。
【解決手段】 人形玩具の足裏を形成する足底部及び人形玩具の足関節を形成する足関節部によって構成される足首骨格部材と該足首骨格部材を被覆する足首外皮部材とからなる足部を有する一対の脚部を備えた人形玩具の足部構造において、前記足部の足首骨格部材を構成する足底部の足裏面に対して踵側に突起部を設けると共に爪先側に対して足幅方向に分かれた少なくとも二つの突起部を設け、足首外皮部材の足裏面に足首骨格部材の足底部に設けられた突起部が密着することによって足首外皮部材の足裏面形状が足首骨格部材の足底部に設けられた突起部に合わせて凹凸状に変形するように構成する。
(もっと読む)
装飾体を取り付けられる筆記具
【課題】 ループが付いた小型ぬいぐるみや裏側に安全ピンの付いた小型バッチなどの装飾体をユーザーが自由に付けたり外したりできる筆記具を提供する。
【解決手段】 引っ掛け用のループ17が付いた小型ぬいぐるみなどの装飾体16を引っ掛けるために、クリップ3の付け根部3bから筆記具1の軸線に沿って上方に片腕型フック本体4aを伸ばし、さらに引っ掛けた装飾体16を片腕型フック本体4aから外れにくくするために、片腕型フック本体4aの裏側に、筆記具1の軸線方向を向いた1号突起9を突設させる。
(もっと読む)
人形の骨格構造及び該人形
【課題】 人形の腕部位或いは脚部位を関節位置で深く屈曲させても屈曲姿勢を維持することができる人形の骨格構造を提供する。
【解決手段】 人体の腕又は脚を構成する両端部に関節を有する骨格を模した人形の骨格構造において、前記人形の骨格中間部に該骨格を屈曲させて分割する前記人体の腕及び脚には無い中間関節部を設け、当該中間関節部を骨格の分割面に形成された相対して当接する関節面部と当該両関節面部を接触・離反させる枢軸部と当該両関節面部の離反を所定角度で停止させる当該枢軸部に回動可能に軸着された係止部とからなる構成とした人形の骨格構造。
(もっと読む)
人形玩具の骨格構造及び当該連結構造を備えた骨格部材並びに当該骨格部材を外皮部材によって被覆した人形玩具
【課題】 ボールジョイント方式の連結構造を採用した骨格部材に近い可動範囲を有し、また、パーツを交換したり、新たなパーツを追加することなく、同じパーツを用いながら異なる体格に変形させることができる人形玩具の骨格構造を提供する。
【解決手段】 隣り合う骨格パーツが連結パーツを介して連結される人形玩具の骨格構造において、前記隣り合う骨格パーツに対してそれぞれ前記連結パーツを挟むことができる間隔を空けて伸びる一対の支持片を設け、当該連結パーツを当該一方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めすると共に、当該他方の骨格パーツの両支持片間に挟んだ状態で回転可能に軸止めし、当該連結パーツの当該一方の骨格パーツに対する回転の軸と当該他方の骨格パーツに対する回転の軸とがねじれの位置となるようにする。
(もっと読む)
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
(もっと読む)
人形玩具
【課題】単に腕部、脚部を交換して人形玩具の外観を変えて遊ぶ人形玩具から、新たな発想の胴体部1に腕部、脚部を取り付けて、従来の遊び方とは全く異なる新規の人形遊びを楽しむことのできる人形玩具を提供すること。
【解決手段】人形玩具は、頭部および胴体部1の骨格を構成する骨格部材4と、該骨格部材4に着脱自在に形成された腕部材2、脚部材3とで構成し、上記骨格部材4には粘土5を付着させて頭部及び胴体部1の外観を形成するようにした。
(もっと読む)
巾着兼用ハンドパペット
【課題】 ハンドパペットの用途を広げて長い時間に亘って使用できるようにする。
【解決手段】 巾着兼用ハンドパペット1は、ねずみの形態を模した袋状のパペット本体2と、パペット本体2の開口縁4に沿って配置された紐3とを備えている。パペット本体2の開口部の周縁には、紐3を通すための紐通し路5が設けられており、紐3は、紐通し路5の一箇所から引出されている。紐3を引き出すと、パペット本体2の開口縁4が小さく絞られる。
(もっと読む)
111 - 120 / 141
[ Back to top ]