
国際特許分類[B25J9/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | 腕の運動により特徴づけられるもの,例.直交座標型 (96)
国際特許分類[B25J9/02]の下位に属する分類
国際特許分類[B25J9/02]に分類される特許
11 - 20 / 59
ロボット
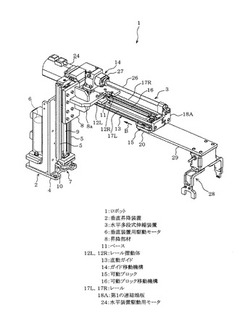
【課題】全体の大きさや重量を大きくすることなく可搬重量を増やす。
【解決手段】水平多段式伸縮装置3のベース11を、直動ガイド13の長さより短い寸法に形成し、且つこのベース11の下面に同じく直動ガイド13の長さより短い寸法の平行状態をなす一対のレール摺動体12L、12Rを設けている。又、直動ガイド13を2本のレール17L、17Rと二つの連結端板18A(ひとつのみ図示)とから構成している。さらに一対のレールレール17L、17Rを連結するについて各レールの端面で各連結端板18Aをねじ止めする構成とした。
(もっと読む)
ツイストスライド機構及びロボット

【課題】スライド動作の俊敏性を低下させずにツイスト動作の俊敏性を向上させることが可能なツイストスライド機構及びロボットを提供する。
【解決手段】本発明のロボット10は、平行に配置された1対のボール螺子機構40,40における1対のベース駆動用ボールナット42,42を旋回ベース30と連結させた構成とすることで、それらボール螺子機構40,40を駆動する1対のベース駆動用サーボモータ81,81によって旋回ベース30のスライド駆動とツイスト駆動の両方を行うことができる。また、それら1対のベース駆動用サーボモータ81,81が共に固定ベース11に固定されているので、スライド動作の俊敏性の低下させずにツイスト動作の俊敏性を向上させることが可能になる。
(もっと読む)
2足移動体の補助装置
【目的】ロープ状の接続部材の緩み量をできるだけ少なくし、2足移動体が姿勢を崩して転倒しかけた場合、その荷重を支持するときの衝撃を減少させるようにした2足移動体の補助装置を提供する。
【解決手段】2足移動ロボット12にロープ状の接続部材(18)を介して接続されると共に、2足移動体が姿勢を崩したときに2足移動体を上方から支持するリフタ(14)からなる2足移動体の補助装置において、リフタを3次元空間において移動自在なリフタ移動手段(20、22、24、26、28、30)と、リフタ移動手段の動作を制御するリフタ制御部(38)と、3次元空間における2足移動体の位置を検出する検出手段(32、34)とを備えると共に、リフタ移動手段制御手段は、検出された位置に基づいてリフタが2足移動体に追従するようにリフタ移動手段の動作を制御するように構成する。
(もっと読む)
カッティングプロッタ
【課題】キャリッジを移動可能に支持するガイドレール等に曲がりが発生していても、当該曲がりによる切削加工の品質劣化を防止できるカッティングプロッタを提供する。
【解決手段】シート状の被加工媒体を支持する加工テーブルと、加工テーブルに支持された被加工媒体の上方に設けられ被加工媒体の切削加工を行うエンドミルと、加工テーブルの上方に設けられ、エンドミルを前後、左右、または上下に移動可能に支持するガイドレール31、Yバー32及び切削駆動機構と、エンドミルを前後、左右、または上下に移動させて被加工媒体を切削加工するように制御するコントロールユニット50とを備えたカッティングプロッタにおいて、ガイドレール31及びYバー32の曲がりを検出するキャリッジ形状測定機構100を備え、検出されたガイドレール31及びYバー32の曲がりに基づいて加工具の移動方向を補正する制御が行われる。
(もっと読む)
搬送システム
【課題】本発明は、大幅に搬送サイクルタイムを向上させた搬送システムを提供するものである。
【解決手段】ワーク10を直線的に搬送する搬送システム1であって、駆動機構がリニアモータ2から構成され、前記リニアモータ2の可動子5上に前記ワーク10を着脱する吸引パッド7を昇降可能にする上下機構6を備えたものである。
(もっと読む)
大型枠組構造物の溶接ロボット装置
【課題】パネル上にロンジとトランスが交差している大型の枠組構造物の交差部を本溶接することができ、本溶接が可能な溶接部位の制約が少なく、人手に頼る手溶接がほとんど不要であり、大型ガントリ構造による従来のマルチロボット溶接装置と比較して装置全体を小型化でき、複雑な制御システムが不要である大型枠組構造物の溶接ロボット装置を提供する。
【解決手段】1対のロンジ2と1又は1対のトランス3で囲まれた升目形状の枠内を溶接対象領域4とし、溶接対象領域4を跨いで大型枠組構造物に固定され溶接対象領域の上部に位置する水平支持架台12を有するロボット架台10と、水平支持架台12の下面に取付けられ升目形状枠内(溶接対象領域4)の全域にわたり溶接ヘッドを3次元的に数値制御して溶接可能な溶接ロボット20とを備える。
(もっと読む)
搬送装置
【課題】第1軸方向、第2軸方向の等速移動区間を長くでき、また、第1軸方向および第2軸方向のうち、いずれかの方向で単独で行われる加速・減速の回数を少なくする。
【解決手段】第1軸ガイド8に沿って移動するスライダー9の移動方向J1と、第2軸ガイド10に沿って移動するホルダー11の移動方向J2が、ホルダー11に取り付けられたチャック6の把持および把持解除の前後に行われる垂直方向の上下移動並びに搬送対象物を搬送元から搬送先に向かって運ぶための水平方向の搬送移動とに対し、平行ではなく、チャック6が搬送対象物を把持してから搬送先で把持解除するまでのホルダー11の移動を、第1軸駆動機構によるスライダー9のJ1方向への移動と第2軸駆動機構によるホルダー11のJ2方向への移動とを合成することによって行わせる。
(もっと読む)
段積み部品取出し装置
【課題】段積みされた部品を効率良く取出す装置を提供する。
【解決手段】平面上で位置決めできる本体と、本体に取り付けられたアクチュエータ62と、該アクチュエータ62により駆動されて上昇端位置α1と下降端位置の2ポイントの位置で上下動する上下本体63と、該上下本体63に自重で上下動できるように貫通状態で設置された自重上下軸41と、該自重上下軸41がその下降端位置にあることを検出するセンサPH1とを具備する段積み部品取出し装置において、前記自重上下軸41の上端部には、自重で下降することを停止させる自重軸ストッパ45が設けられ、前記自重上下軸41の下端部には、部品を把持するチャック21と、前記自重上下軸41を部品上面で停止させるためのストッパ51が設けられていることを特徴とする。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
直交ロボット、該直交ロボットを備えた部品実装装置および前記直交ロボットの制御方法
【課題】ヘッドユニットにより搬送される部品の位置決め精度を確保しつつ、ヘッドユニットに備えられた複数のツールで同時に複数の部品を保持する際の精度を向上させる。
【解決手段】本発明の直交ロボットは、所定の第1の軸線の方向に延びる第1の駆動手段と、前記第1の軸線の方向と交差する第2の軸線の方向に延びる第2の駆動手段と、前記第2の駆動手段の駆動によって前記第2の軸線に沿って移動するヘッドユニットと、前記各駆動手段を制御する制御手段とを有し、該制御手段は、前記第2の軸線が主軸の第1の軸線と直交する方向からずれている場合にそのずれ分を検出し、前記2本の第1の駆動手段を同期させて駆動するためのパラメータを前記ずれ分に相当する量だけずらしつつ、前記2本の第1の駆動手段を駆動するように構成されている。
(もっと読む)
11 - 20 / 59
[ Back to top ]