
国際特許分類[B25J9/02]の内容
処理操作;運輸 (1,245,546) | 手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ (16,135) | マニプレータ;マニプレータ装置を持つ小室 (9,248) | プログラム制御マニプレータ (1,513) | 腕の運動により特徴づけられるもの,例.直交座標型 (96)
国際特許分類[B25J9/02]の下位に属する分類
国際特許分類[B25J9/02]に分類される特許
21 - 30 / 59
産業用ロボット
【課題】搬送対象物の重量が変動しても、ハンドに搭載される搬送対象物の傾きを適切に補正することが可能な産業用ロボットを提供すること。
【解決手段】産業用ロボット1は、搬送対象物2が搭載されるハンド3と、搬送対象物2が搭載されたときのハンド3の撓みによる搬送対象物2の傾きを補正する傾き補正機構17とを備えている。傾き補正機構17は、駆動源となる傾き補正用モータと、傾き補正用モータの出力軸に連結される偏心回転部材と、偏心回転部材に下端側が取り付けられるリンク部材と、リンク部材の上端側が取り付けられる取付部材とを備えている。傾き補正機構17は、偏心回転部材の回転に伴ってリンク部材とともに上下動する取付部材によって、支点部36を回動中心として搬送対象物2の傾きを変化させる方向にハンド3を回動させている。
(もっと読む)
物体入れ換え装置および物体移動装置

【課題】同一平面内において物体の位置入れ換えを効率的に行って、複数の物体の任意位置への移動を可能とする。
【解決手段】移動機構ビーム5a,5bの交点に配されたスライダ19aに、回転軸7aを介して物体搭載部11aを持つ入れ換え機構13aを連結する。移動機構ビーム6a,6bの交点に配されたスライダ19bに、回転軸7bを介して物体搭載部11bを持つ入れ換え機構13bを連結する。スライダ19a,19bの移動により、物体12a,12bが移動する。入れ換え機構13a,13bは、凸型接続部9aと凹型接続部9bの嵌合により連結可能とされている。この連結状態で、物体搭載部支持機構10が、物体搭載部11a,11bを支持した状態で回転し、物体搭載部11a,11b、従って物体12a,12bの位置入れ換えを行う。入れ換え機構13a,13bの干渉による影響を受けずに、物体12a,12bを任意位置に移動できる。
(もっと読む)
自動試験装置
【課題】Z軸方向に所定の負荷をかける機器の試験を行う自動試験装置において、Z軸方向へ所定の負荷をかける加重制御の管理可能な加重の幅を広くする。
【解決手段】X軸方向、Y軸方向、Z軸方向にそれぞれ移動するX軸移動ユニット2、Y軸移動ユニット3、Z軸移動ユニット4を備えた自動試験装置において、前記Z軸移動ユニット4に固定されX軸方向の下方に延びたアーム404の下端部に取り付けられた加重制御ユニット401と、前記加重制御ユニットの下側に取り付けられた作用子402を備え、前記加重制御ユニット401は、前記上側固定板401aに設けられた孔401eに上側固定板401aには摺動自在となるように貫設し、上部に前記下側稼動板401bの下方向の移動を係止する係止部を具備した圧縮バネ案内軸401dと、前記圧縮バネ案内軸401dに案内される圧縮バネ401cから構成されている。
(もっと読む)
移動体システム
【課題】大型化および重量の増加を招くことなく、レール軌道などや移動体の重量に起因する位置決め精度の悪化を抑制する。
【解決手段】断面コ字状の軌道レール30は、その自重によってねじれが生じることになる。このねじれのせん断中心S上で部品吸着ヘッド132を移動体31が保持することにより、軌道レール30のねじれを抑制し、移動体31の高さ方向の位置ずれを抑制している。
(もっと読む)
吊り型ロボット
【課題】一対の支柱間に架設された走行レールに旋回アームを有したロボット本体を往復移動可能に吊り下げ支持した構成の吊り型ロボットにおいて、ロボット本体が支柱のごく近くで停止した位置でのアームの旋回範囲を広げる。
【解決手段】一対の支柱のうちの一方の支柱6において、ロボット本体9の移動空間21側の側部に切り欠き部分22を設ける。すると、ロボット本体9が支柱6の直ぐ近くの位置で停止してアームを旋回させた場合、アームが支柱6に当たることなく旋回できる範囲が広がる。
(もっと読む)
ロボット
【課題】従来技術と同じようなサイズの部品を使用した場合でも、直動軸に懸架ユニットを懸架した構成において、全体の小形化を図ることができるロボットを提供する。
【解決手段】旋回ユニット3を構成する駆動部19を、直動軸4の側方においてケーブルベア15の曲面を持つ曲げ状態の曲げの内側に位置させてなるように旋回ユニット3に備えたので、駆動部19を、旋回ユニット3と連結された状態で直線移動するケーブルベア15の曲面を持つ曲げ状態の内側に位置するにしても何ら支障を生じることがない。これにより、ケーブルベア15の曲面を持つ曲げ状態の内側のデッドスペースを有効活用することができる。
(もっと読む)
高速アプリケーション用多軸ロボット
【課題】位置決め精度を高めたベルト駆動設計の多軸ロボットを提供する。
【解決手段】互いに実質的に平行に配置されている第1ガイドレールと第2ガイドレール12,14とを具備する。第1端18および第2端20を有するクロスバー16が、ガイドレール12,14に作動可能に支持されている。第2運動軸66に沿って移動させるために、搬送台22が前記クロスバー16に作動可能に連結されている。第1および第2ドライブと、第1ベルト32とを有する第1駆動システムは、第1および第2運動軸66に沿った搬送台22の移動を提供する。第2および第3ベルト34,36は別々の第2および第3ベルト経路を走行し、第2および第3ベルト34,36の一方は右回りでクロスバー16に進入するとともに、左回りでクロスバー16から離れ、第2および第3ベルトの他方が左回りでクロスバー16に進入するとともに、右回りでクロスバー16から離れる。
(もっと読む)
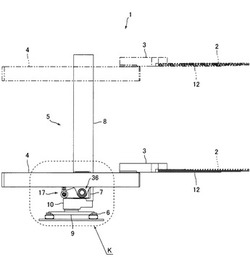
パレタイザーのためのハンドリングロボット
本発明によれば、ハンドリングロボットは垂直伸縮マスト(11)を含み、垂直伸縮マスト(11)は、垂直に固定されたベース(20)及び同期された動作の複数のセクション(21〜23)を備え、前記動作は速度及び加速度が制御され且つ重力伸長動作及び動力退避動作を含み、それぞれのセクションは個々に駆動され、最後のセクション(23)はパレットに載せられる製品(3)を把持するためのヘッド(13)を担う。該ロボットは、異なるセクション(21〜23)を動かすための共通の駆動シャフト(30)を含み、前記シャフト(30)は、それらがそれぞれ伝達部材を経由して操作するセクション(21〜23)の移動に適した直径を有するホイールを含む。ホイール(31、32)及びそれらのセクション(21、22)の間の伝達部材は、対応するホイール上に巻き付くベルトから構成される。把持ヘッドを担う最後のセクション(23)に関しては、伝達動作がチェーンにより実行される。ハウジング(46)は、各動作伝達チェーンの自由端を受容して、格納し、それぞれ曲がったらせん経路を規定するノッチを備えたブロックの形態で作られる。 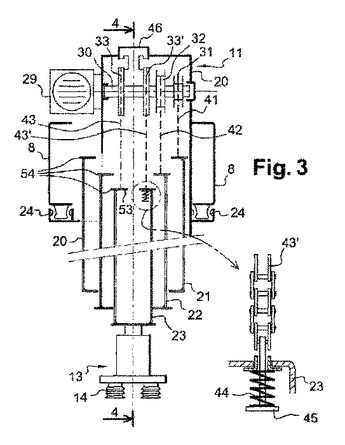 (もっと読む)
(もっと読む)
ハンドリング装置
【課題】狭い作業領域で効率よくワークを搬送できるハンドリング装置を提供する。
【解決手段】水平方向に伸長するガイドレール11、ガイドレールに沿って移動する可動キャリッジ20、可動キャリッジに設けられてワークを取り扱うハンドリングロボットRを備え、ハンドリングロボットRは、可動キャリッジに対して上下方向に伸縮自在に設けられたテレスコアーム30、テレスコアームに保持されると共に水平面内で旋回して伸縮又は屈曲動作を行うべく互いに連結された複数の旋回アーム40,50、複数の旋回アームの最も先端側に設けられたハンドユニット60を含む。これによれば、複数の旋回アームが水平面内で二次元的に移動するものであるため、上下方向の剛性が高く、質量の大きいワークでも停止時に振動やブレ等の発生を防止でき、狭い作動範囲において、安定したハンドリング操作を行える。
(もっと読む)
一体化されたウェハ受渡し機構
一体化された高速ロボット機構が、搬送機器を改良し、対象物移動を位置合わせ又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、通常、対象物をチャンバに出し入れするためのエンドエフェクタと、中心合わせ及びシータ位置合わせ能力を提供するためにロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有する。本発明は、複数の一体化されたロボットアセンブリと、受渡しシステムとを有する受渡しロボットシステムも開示しており、この場合、受渡しロボットシステムは、FOUP又はFOSB、フロントエンドモジュール(FEM)、又はソータ等の複数の結合されたチャンバのために働く。移動するロボットへのこれらの組み込まれた能力の使用により、1つの対象物受渡し操作が、毎時500パーツを超えることができる。  (もっと読む)
(もっと読む)
21 - 30 / 59
[ Back to top ]