
国際特許分類[B60L11/12]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 電気的推進車両の推進装置;車両用磁気的懸架または浮揚装置;電気的推進車両の変化の監視操作;電気的推進車両のための電気安全装置 (20,799) | 乗物の内部に動力供給源をもつ電気的推進装置 (11,220) | 機関駆動発電機を用いるもの (6,487) | 付加的な電力を供給されるものをもつもの,例.蓄電池 (410)
国際特許分類[B60L11/12]に分類される特許
11 - 20 / 410
内燃機関運転状態検出装置
【課題】シリーズ式ハイブリッド車両において車両走行中にエンジンの運転状態検出用のセンサの診断を開始する際に、センサ診断のためのエンジン動作状態を早期に作り出す。
【解決手段】エンジンコントローラ8は、センサの診断前にハイブリッドコントローラ8にセンサ診断開始信号を送信してその送信に対応する返信信号を受信した場合にエンジン2をセンサの診断のための動作状態にするとともにセンサの出力を基に該センサの診断を行い、ハイブリッドコントローラ9は、エンジンコントローラ8からセンサ診断開始信号を受信した場合にその受信に対する返信信号をエンジンコントローラ8に送信するとともに発電モータ3をセンサの診断のための動作状態にする。
(もっと読む)
車両搭載用発電装置

【課題】エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置において、エンジンおよびジェネレータを適切に制御すると共に、その制御を容易化することを目的とする。
【解決手段】発電コントロールユニット34は、エンジン12が停止している状態において二次電池18の充電電荷量が減少し、電力経路電圧値Vpが第1閾値としての始動閾値VLに達したときに、エンジン12に対する始動制御を実行する。エンジン12の始動によってモータジェネレータMG1は発電を行い、その発電電力によって二次電池18が充電される。モータジェネレータMG1の発電電力によって二次電池18が充電されることにより電力経路電圧値Vpは増加する。これによって、電力経路電圧値Vpが第2閾値としての停止閾値VHに達すると、発電コントロールユニット34は、エンジン12に対する停止制御を行う。
(もっと読む)
電動駆動車両
【課題】運転者が、どこまで走行させることができるかを知ることができ、安心して走行させる。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、現在地検出部と、電動駆動車両を走行させることができる道なりの走行可能経路を探索する経路探索処理手段と、距離当たり消費エネルギーに基づいて、走行可能時間を算出する走行可能時間算出処理手段と、走行可能距離を算出する走行可能距離算出処理手段と、走行可能範囲を算出する走行可能範囲算出処理手段と、走行可能範囲を表示部43に表示する走行可能範囲表示処理手段とを有する。
(もっと読む)
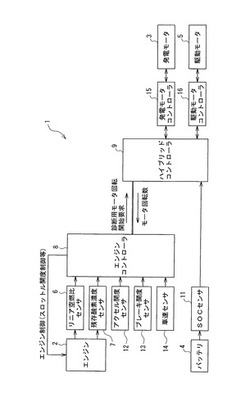
シリーズ式ハイブリッド車両の駆動制御装置
【課題】エンジンの回転数の変化による加速感の提供と発電効率の向上の両立を図る。
【解決手段】ハイブリッドシステム1は、SOCセンサ11が検出したSOCがHEV低SOC以上の場合、システムの発電効率が予め設定された発電効率以上となる第1の領域内で、アクセルペダルの操作量に基づいて、エンジン2の回転数及びトルクを制御してエンジン動作点でエンジン2を動作させ、SOCセンサ11が検出したSOCがHEV低SOC未満の場合、第1の領域のときよりも発電モータ3の発電電力が大きくなる第2の領域内で、アクセルペダルの操作量に基づいて、エンジン2の回転数及びトルクを制御してエンジン動作点でエンジン2を動作させるハイブリッドコントローラ6とを備える。
(もっと読む)
発電用モータの駆動制御装置
【課題】本発明は、内燃機関の駆動停止に起因した発電機による内燃機関のモータリングを速やかに中止すること、そのようなモータリングが連続する場合には内燃機関の故障を判断することを目的としている。
【解決手段】このため、駆動用モータと、駆動用モータに電力を供給可能な高圧バッテリと、内燃機関と連結され相互駆動し得る発電用モータとを備えるハイブリッドシステムの発電用モータの駆動制御装置において、高圧バッテリの充電分発電トルクと駆動用モータの駆動分発電トルクとで発電時に正の値の要求べ一ス発電トルクを算出し、内燃機関および発電用モータの所定の回転数にフィードバック制御する際の差分補正に相当する回転数フィードバックトルクを算出し、要求べ一ス発電トルクと回転数フィードバックトルクの和が負の値の時には、発電用モータヘの要求発電トルクをゼロに設定する。
(もっと読む)
電動駆動車両
【課題】運転者が目標走行時間を設定した場合に、安心して走行させることができるようにする。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、走行抵抗及び補機によって消費されるパワーに基づいて、電動駆動車両を走行させるのに必要な消費パワーを推定する消費パワー推定処理手段と、消費パワー及び平均車速に基づいて距離当たり消費エネルギーを算出する距離当たり消費エネルギー算出処理手段と、前記発電装置の距離当たり発電エネルギーを算出する発電エネルギー算出処理手段と、距離当たり消費エネルギー、距離当たり発電エネルギー、バッテリ残量及び燃料の残量に基づいて、走行可能時間を算出する走行可能時間算出処理手段とを有する。
(もっと読む)
電動駆動車両
【課題】運転者がどこまで走行させることができるかを知ることができるようにする。
【解決手段】蓄電装置と、発電装置と、エンジンと、駆動モータと、現在地検出部と、電動駆動車両を走行させることができる道なりの走行可能経路を探索する経路探索処理手段と、距離当たり消費エネルギーに基づいて、走行可能時間を算出する走行可能時間算出処理手段と、走行可能距離を算出する走行可能距離算出処理手段と、電動駆動車両を走行させることができる走行可能範囲を設定する走行可能範囲設定処理手段と、走行可能範囲内における運転者が指定した走行目的に適合する施設を目的地候補として表示部43に表示する目的地候補表示処理手段とを有する。
(もっと読む)
車両搭載用発電装置
【課題】エンジンによってジェネレータを駆動して発電を行う車両搭載用発電装置におけるエネルギー損失を抑制することを目的とする。
【解決手段】車両搭載用発電装置は、エンジン10、モータジェネレータMG1、モータジェネレータMG1の交流発電電力を直流電力に変換する整流回路14、整流回路14と車両駆動回路26との間の電力経路に、二次電池18の出力電圧を昇圧した昇圧を出力するDC/DCコンバータ回路20、および、コントロールユニット30を備える。コントロールユニット30は、エンジン10、モータジェネレータMG1、二次電池18、モータジェネレータMG2の各エネルギー損失等に基づいて、モータジェネレータMG1の回転数対トルク特性上に、エンジン10およびモータジェネレータMG1の目標動作点を設定する。そして、エンジン10およびモータジェネレータMG1の動作点を目標動作点に一致させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】トラクション制御中における駆動電力の応答性を高める。
【解決手段】エンジン3に駆動される発電機5と、車両を駆動する駆動モータ11とを備える、ハイブリッド車両の発電制御装置において、車輪13のスリップに応じたモータトルク指令値制御を検出するトラクション制御検出手段1と、前記トルク指令値に応じた目標駆動電力から、発電電力を演算する要求発電電力演算手段1と、要求発電電力のための、発電機回転速度指令値とエンジントルク指令値からなる運転点又は発電機トルク指令値とエンジン回転速度指令値からなる運転点を演算する運転点演算手段1と、運転点から発電機及びエンジンを制御する制御手段1と、実際の発電電力とモータの実際の駆動電力が一致するようにトルクを制御する駆動モータ制御手段1,2,4と、を有し、トラクション制御中に、燃費を優先した運転点に代えて、発電機の回転速度変化量が所定値以下である運転点に設定する。
(もっと読む)
ダンプトラックの走行駆動装置
【課題】 スピンドルの開口端側とキャリアとの間に設けるスプライン結合部の直径を大きくすることなく、回転負荷に対する強度を高めるようにする。
【解決手段】 スピンドル14の開口側とキャリア38との間を、別部材からなる筒状連結部材51によりスプライン結合する。筒状連結部材51は単純な形状をなす段付筒状体として形成され、軸方向一側の第1の雄スプライン部51Aがスピンドル14の雌スプライン部14Fにスプライン結合される。軸方向他側の第2の雄スプライン部51Bはキャリア38の雌スプライン部38Fにスプライン結合される。第2の雄スプライン部51Bは、第1の雄スプライン部51Aよりも小径に形成され、第1の雄スプライン部51Aと第2の雄スプライン部51Bとの間には全周にわたって延びる環状の段差部51Cを形成する。
(もっと読む)
11 - 20 / 410
[ Back to top ]