
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
151 - 160 / 3,780
車両用監視装置
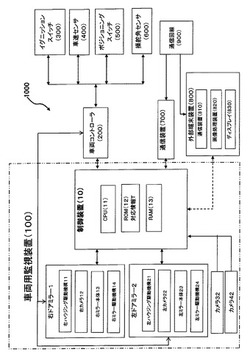
【課題】ドアミラー1,2に設けられたカメラ12,22を用いて、駐車支援や走行時の周辺観察に用いることができる映像を撮像するとともに、車両周囲の安全を監視するために用いることができる映像を撮像する。
【解決手段】
車両Mに取り付けられ、カメラ12,22とミラー本体と13,23が取り付けられたハウジングHを備えるドアミラー1,2と、ドアミラー1,2のハウジングHの向きを変更させるハウジング駆動機構11,21とを備え、車両から取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にハウジングHの向きを変更させる際に、車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、この取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラー1,2のハウジングHの向きを変更させる制御装置10を備える車両用監視装置100を提供する。
(もっと読む)
車両周辺監視装置

【課題】障害物を認識した際に、車両周辺の撮影画像に含まれている風景と障害物との位置的なつながりが簡単に把握できる車両周辺監視装置。
【解決手段】撮影画像の一部分である狭視野領域を注目撮影画像として生成し、認識された障害物の撮影画像における領域である障害物領域が狭視野領域外に存在する場合、前記狭視野領域と一部が重複する画像領域であって、かつ撮影画像の一部分である画像領域に、障害物領域が含まれる場合に、当該画像領域を注目障害物画像として生成し、この注目撮影画像と注目障害物画像とからなる周辺監視用表示画像が生成される。
(もっと読む)
車載カメラ姿勢検出装置
【課題】カメラの姿勢を正確に検出することができる車載カメラ姿勢検出装置を提供すること。
【解決手段】カメラ10で撮影したキャリブレーションシート200の移動前画像を格納する移動前画像格納部20と、移動前画像に基づいてカメラ10の姿勢を推定する移動前カメラ姿勢推定部24と、車両を直線状に所定距離移動させた後に撮影した移動後画像を格納する移動後画像格納部22と、移動後画像に基づいてカメラ10の姿勢を推定する移動後カメラ姿勢推定部26と、2つの推定結果に基づいてキャリブレーションシートのずれ量を算出するずれ量算出部32と、カメラ10の姿勢推定値とキャリブレーションシートのずれ量に基づいてカメラ10の姿勢を決定するカメラ姿勢決定部34と、車両の移動が直線状か否かを判定する直線移動判定部46とを備えている。
(もっと読む)
作業車両の周辺監視装置
【課題】本発明の課題は、作業車両の走行時に作業車両の位置をオペレータが容易に認識することができる作業車両の周辺監視装置を提供することにある。
【解決手段】周辺監視装置の俯瞰画像作成部は、作業車両1が停止状態であるときには、第1仮想投影面31を用いて俯瞰画像を作成する。第1仮想投影面31の少なくとも外縁部は、作業車両1から遠ざかるほど地面からの高さが高くなる形状である。作業車両1が走行状態であるときには、俯瞰画像作成部は、第2仮想投影面32を用いて俯瞰画像を作成する。第2仮想投影面32の少なくとも外縁部は、地面からの高さが一定の平坦な形状である。
(もっと読む)
接近物検知装置および接近物検知方法
【課題】接近物であるか否かの判定を迅速に行うことができ、静止物が接近物であるとの誤判定を低減して、接近物警報システムに適用する際の静止物を対象とした誤警報の出力を低減することができる「接近物検知装置および接近物検知方法」を提供すること。
【解決手段】接近物候補検出手段4によって立体物の最新の検出結果が取得される毎に、最新の検出結果に示される立体物の重心を算出する重心算出手段5と、前記重心の算出結果に基づいて、前記重心の移動方向を算出する移動方向算出手段6とを備え、接近物判定手段7は、前記重心の移動方向が、移動体への接近を示す方向である場合には、接近物であると判定し、前記重心の移動方向が、移動体からの離間を示す方向である場合には、接近物でないと判定すること。
(もっと読む)
作業車両の周辺監視装置
【課題】車体と車体周辺の物体との位置関係をカメラ画像上で容易に判断可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、カメラ画像と、カメラ画像上の地面に垂直投影される車体(ベッセル4を含む)の外縁を示す車体外縁線BLと、をモニタ30に表示させる表示制御部40を備える。
(もっと読む)
画像生成装置、画像表示システム、及び、画像生成方法
【課題】車両の進行方向とは逆方向に存在する物体をユーザが把握できるようにする。
【解決手段】画像表示システムでは、シフト判定部が車両9の進行方向を判定する。そして、合成画像生成部が、車両9を俯瞰する仮想視点からみた車両9の周囲の周辺領域A1と、車両9の進行方向とは逆方向の後方領域A2とを連続的に示す合成画像CP1を生成する。ディスプレイは、この合成画像CP1を含む表示画像DP1を表示する。表示画像DP1が車両9の進行方向とは逆方向の後方領域A2を示す合成画像CP1を含むため、ユーザは、表示された表示画像DP1を視認することで、車両9の進行方向とは逆方向に存在する物体を把握することができる。
(もっと読む)
車両の前照灯装置
【課題】配光制御を複雑なものにすることなく前方領域の視認性を改善する一方で前方車両に対する眩惑を防止することを可能にした車両の前照灯装置。
【解決手段】車両の左ランプLHiは鉛直方向に延びるゾーン形状をした複数の鉛直ラインゾーンVZを水平方向に分割した光照射領域PLHiとし、右ランプRHiは水平方向に延びるゾーン形状をした複数の水平ラインゾーンHZを鉛直方向に分割した光照射領域PRHiとする。各光照射領域PLHi,PRHiを重畳し、かつ各ゾーンの照射光量を制御することで両ゾーンが交差した交差ゾーンの光量を制御することができ、所要の配光パターンを得る。
(もっと読む)
作業車両の周辺監視装置
【課題】不要な警告を抑制可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
(もっと読む)
作業車両の周辺監視装置
【課題】俯瞰画像において作業車両の近くに位置する物体を容易に認識することができる作業車両の周辺監視装置を提供する。
【解決手段】作業車両の周辺監視装置において、第1撮像部は、作業車両の周囲の第1領域を撮像して第1画像データを得る。俯瞰画像作成部は、第1画像データを所定の仮想投影面31に投影することにより、作業車両の周囲の俯瞰画像を作成する。仮想投影面31は、作業車両に近づくほど地面からの高さが高くなる形状を含む。
(もっと読む)
151 - 160 / 3,780
[ Back to top ]