
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
181 - 190 / 3,780
環境認識装置および環境認識方法
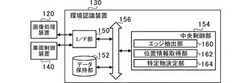
【課題】処理負荷を軽減すると共にメモリの記憶領域を低減することで、対象物の特定効率の向上を図る。
【解決手段】環境認識装置130は、特定物の形状に関する情報である形状情報を予め保持しておき、検出領域内を分割した複数の対象部位の輝度を取得して、エッジを有する対象部位を抽出し、エッジを有する対象部位の相対距離を取得し、相対距離に応じた形状情報に基づいてエッジを有する対象部位にハフ変換を施し、形状情報で示される特定物を決定する。
(もっと読む)
車両用表示装置

【課題】 複数方向の車外の撮影画像を表示切り換えする場合にあって、何れの方向を示す撮影画像であるのか識別し易い表示出力を行う車両用表示装置を提供する。
【解決手段】 車両内に設けられる表示パネル1と、前記車両外を撮影し撮影データとして出力する撮影手段2と、前記車両の車両情報と前記撮影データとに基づいて描画処理することによって、表示パネル1に表示するための画像データを生成して表示パネルを制御する制御手段3と、を備え、制御手段3は、前記車両情報に基づいて前記撮影データのうち所望の撮影方向の撮影画像を選択し、前記撮影方向を示す付加情報を合成することを含む描画処理によって、前記画像データを生成する。
(もっと読む)
運転支援装置
【課題】交差点への進入時に、運転者に対して運転支援情報を適切な方法で提供することができ、運転者に対して不要な運転支援情報を提供することがなく、運転者を煩わせることがないようにする。
【解決手段】衝突可能性判定手段3は、撮像手段8L、8Rにより撮像された画像と通信手段9により取得された情報とに基づいて自車両と他車両とが衝突する可能性があるか否かを判定し、制御手段6は、自車両の速度から自車両が一時停止のある交差点への進入時であるか否かを判定して、交差点への進入時と判定し、かつ、先行車との車間距離が予め設定された値を超え、かつ、自車両と他車両とが衝突する可能性があると判定された時には、表示手段4は撮像手段8L、8Rにより撮像された画像とともに自車両と他車両とが衝突する可能性があることを表示し、音声出力手段5は自車両と他車両とが衝突する可能性があることを音声出力するように制御する。
(もっと読む)
環境認識装置および環境認識方法
【課題】応答遅延を伴うことなく、適切にホワイトバランス補正を実現する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の輝度を取得し、取得した輝度の中から道路面の輝度および参照部位の輝度を特定し、参照部位の輝度が第2所定値以上変化していない状態において道路面の輝度が第1所定値以上変化し、道路面の変化後の輝度が所定色でなければ、変化時点から、道路面の輝度が所定色に戻るまで、変化する前のホワイトバランス補正値を維持し、それ以外では、道路面の輝度が所定色として認識できるように、ホワイトバランス補正値を導出し、取得した輝度に、ホワイトバランス補正値によるホワイトバランス補正を施して補正輝度を導出し、データ保持部に保持された、輝度の範囲と特定物との対応付けに基づいて、対象部位の補正輝度から、対象部位に対応する特定物を仮決定する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
車両用前照灯装置
【課題】照射範囲制御中において、パッシング動作直後の目的対象物への視認性を確保することができる車両用前照灯装置を提供する。
【解決手段】本発明の車両用前照灯装置は、目標対象物Bが検出された場合、制御手段62が、解析手段61の解析結果に基づいて、照射範囲を、目的対象物Bを照射する目的で、目的対象物Bに応じて変更する車両用前照灯装置であって、制御手段62が目的対象物Bに対する制御作動中、当該照射範囲を記憶する記憶手段63と、パッシング動作を検出するパッシング検出手段5を備え、制御手段62は、目的対象物Bに対する制御作動中、パッシング動作が検出された場合、パッシング動作直後の照射範囲を、パッシング動作直前に記憶手段63に記憶された照射範囲に変更することを特徴とする。
(もっと読む)
運転支援装置
【課題】自車両が走行する走行車線の路側にいる歩行者の横断可能性をより早い段階で予測して、歩行者との衝突を防止するように支援する。
【解決手段】前方情報検出手段11,12により検出された自車両の前方の情報から、走行車線に対向する対向車線の路側の対向歩行者が対向車線を横断しているか否かを判定する対向歩行者判定手段14bと、対向歩行者判定手段14bにより対向歩行者が横断していると判定されたら、前方歩行者の顔の向きから、前方歩行者が対向歩行者の横断を認識したか否か、及び、前方歩行者が自車両の存在を認識したか否かを判定する横断可能性判定手段14cと、横断可能性判定手段14cにより前方歩行者が対向歩行者の横断を認識し且つ自車両の存在を認識していないと判定された場合に、前方歩行者が横断する可能性があると予測して前方歩行者に対する準備制御をする制御手段14d,14eと、を備える。
(もっと読む)
段差警報システム
【課題】段差検知センサーや車高センサーなどを不要にして低コスト化を図るとともに、ドライバーの段差の見落としをサポートできる段差警報システムを提供する。
【解決手段】歩道に設けられ該歩道を挟んで車道と該歩道外の敷地との間を自車両が出入りするための出入り口が前記歩道に設けられ、前記出入り口の両側に位置する前記歩道と車道との境の部分に存在する段差を自車両が通過すると判断された場合に警報する段差警報システムにおいて、自車両の現在位置データと道路データに基づいて自車両10が出入り口に向け走行する経路上で自車両10が段差20に気付かずに段差20を通過するか否かを判定し、段差20を通過すると判定した場合に段差20の高さデータと自車両10の地上高データとを比較して段差20の高さが自車両10の最低の地上高以上か否かを判定し、段差20の高さが最低の地上高以上であると判定された場合に警報を発する。
(もっと読む)
目標軌道算出装置
【課題】自動駐車等の際の車両の目標軌道を、操舵のエネルギーロス及び、移動開始位置から目標位置に至るまでの車両の走行距離を考慮して算出し、燃費の向上を図る。
【解決手段】車両1の軌道計画部6の演算手段により、車両1が移動開始位置(起動位置)から目標位置まで移動する間の操舵のエネルギーロスの要因である旋回円における舵の切角量及び、移動開始位置から目標位置までの移動の軌道距離に基づく仕事量を演算し、軌道計画部6の設定手段により、旋回前の操舵や旋回後の切り戻しの操舵によるエネルギーロス及び軌道距離に基づいて消費されるエネルギー量が所定値以下になる半径の旋回円の弧に沿う軌道を目標軌道として算出する。
(もっと読む)
車両用情報伝達装置
【課題】情報を、車外環境によらずドライバにとって認知し易くなるように伝達することができる車両用情報伝達装置を提供することを課題とする。
【解決手段】本実施形態によれば、取得した自車両外の照度が予め設定した輝度変化可視可能照度より大きくない場合には、危険度に応じて光刺激の輝度勾配を変える光刺激生成方法を選択し、当該取得した自車両外の照度が当該輝度変化可視可能照度より大きい場合には、危険度に応じて光刺激の図形形状を変える光刺激生成方法を選択する。
(もっと読む)
181 - 190 / 3,780
[ Back to top ]