
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
141 - 150 / 3,780
車載カメラ
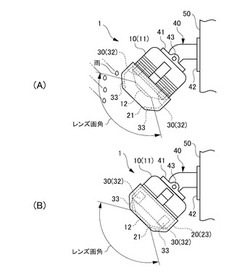
【課題】車両の外部に取付けられ、広い画角を持つ広角レンズを介して車外を撮像するものでありながら、広い画角を維持しつつ、広角レンズに対する雨滴や泥の付着を抑制できる車載カメラを提供すること。
【解決手段】広い画角を持つ広角レンズ12を介して車外を撮像するカメラ本体10と、カメラ本体10の前面部13を覆い、かつ、広角レンズ12と対向する部分が開口したフード20と、フード20をカメラ本体10の前面部13に対して前後方向に摺動させるフード摺動手段30と、を備え、カメラ非動作時には、フード20をカメラ本体10の前面部13から離間する前進位置に保持することにより、広角レンズ12の視界をフード20で覆い、カメラ動作時には、フード20をカメラ本体10の前面部13に近接する位置に保持することにより、広角レンズ12の視界後方にフード20を退避させる。
(もっと読む)
車両周囲監視装置

【課題】簡単な構成で自車と接触する可能性のある歩行者を容易に検出することが可能な車両周囲監視装置を得ること。
【解決手段】車載カメラ111によって予め設定された時間間隔をおいて撮像された撮像画像間における観測対象の画像の大きさの変化率と、撮像画像間における観測対象の画像の変形の有無に基づいて、観測対象が自車に対して相対的に接近移動している歩行者であるか否かを判定する。
(もっと読む)
車両周辺撮影装置
【課題】車両の周縁部直下付近を撮影することができる車両周辺撮影装置を提供する。
【解決手段】車両Vの前照灯1内に設けられたカメラ10と、前照灯1内に設けられ、カメラ10の光軸を車両Vの周縁部下方に導くレンズ13と、を備えた。
(もっと読む)
映像信号処理システム
【課題】早期にバックカメラ10からの映像をLCDパネル16に表示する。
【解決手段】システムの起動時において、ディスプレイコントローラ14は、メモリ20から設定データによる設定を行い、セレクタ54によりバックカメラ10から直接供給されるビデオ信号を選択し、これを解像度変換したビデオ信号をLCDパネル16に供給する。一方、システムコントローラ12が立ち上がった後に、セレクタ54によりシステムコントローラ12から供給されるビデオ信号を選択し、これをLCDパネル16に供給する。
(もっと読む)
車載カメラ姿勢検出装置
【課題】カメラの姿勢を正確に検出することができる車載カメラ姿勢検出装置を提供すること。
【解決手段】カメラ10で撮影したキャリブレーションシート200の移動前画像を格納する移動前画像格納部20と、移動前画像に基づいてカメラ10の姿勢を推定する移動前カメラ姿勢推定部24と、車両を直線状に所定距離移動させた後に撮影した移動後画像を格納する移動後画像格納部22と、移動後画像に基づいてカメラ10の姿勢を推定する移動後カメラ姿勢推定部26と、2つの推定結果に基づいてキャリブレーションシートのずれ量を算出するずれ量算出部32と、カメラ10の姿勢推定値とキャリブレーションシートのずれ量に基づいてカメラ10の姿勢を決定するカメラ姿勢決定部34と、車両の移動が直線状か否かを判定する直線移動判定部46とを備えている。
(もっと読む)
撮像レンズおよび撮像装置
【課題】撮像レンズにおいて、小型かつ低コストに構成し、広角化と高い光学性能を実現する。
【解決手段】物体側に凸面を向けたメニスカス形状で負のパワーを持つ第1レンズL1と、光軸近傍において物体側の面が物体側に凹形状であるとともに、負のパワーを持つ第2レンズL2と、正のパワーを持つ第3レンズL3と、絞りと、正のパワーを持つ第4レンズL4と、負のパワーを持つ第5レンズL5との実質的に5枚のレンズからなる。第1〜第5レンズL1〜L5は少なくとも一方の面が非球面である。第4レンズL4の物体側の面の光軸近傍の曲率半径および第4レンズL4の像側の面の光軸近傍の曲率半径に関する所定の条件式を満足する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
車載カメラ姿勢検出装置および方法
【課題】カメラの姿勢を正確に検出することができる車載カメラ姿勢検出装置および方法を提供すること。
【解決手段】カメラ10で撮影されたキャリブレーションシート200の画像を移動前画像として格納する移動前画像格納部20と、移動前画像に基づいてカメラ10の姿勢を推定する移動前カメラ姿勢推定部24と、車両を所定距離移動させた後に撮影したキャリブレーションシートの画像を移動後画像として格納する移動後画像格納部22と、移動後画像に基づいてカメラ10の姿勢を推定する移動後カメラ姿勢推定部26と、2つの推定結果に基づいてキャリブレーションシートのずれ量を算出するずれ量算出部32と、カメラ10の姿勢推定値とキャリブレーションシートのずれ量に基づいてカメラ10の姿勢を決定するカメラ姿勢決定部34とを備えている。
(もっと読む)
車載カメラ姿勢検出装置
【課題】キャリブレーションシートに含まれる校正指標の位置を正確に検出することができる車載カメラ姿勢検出装置を提供すること。
【解決手段】車載カメラ姿勢検出装置100は、カメラ10で撮影されたキャリブレーションシート200の画像を格納する移動前画像格納部20等と、これらの画像に基づいてカメラ10の姿勢を推定する移動前カメラ姿勢推定部24等と備える。キャリブレーションシートは、大きい第1の校正指標220と小さい第2の校正指標210が含まれている。移動前カメラ姿勢推定部24等は、第1および第2の校正指標210、220の位置を検出する校正指標中心位置検出部60を有する。校正指標中心位置検出部60は、第2の校正指標210の位置検出を行い、少なくとも一部について正常な位置検出ができなかったときに第1の校正指標220の位置検出を行う。
(もっと読む)
オプティカルフロー検出装置
【課題】この発明は、単独のフローの信頼度評価に対応でき、誤った衝突可能性判定を回避できるオプティカルフロー検出装置を実現することを目的とする。
【解決手段】この発明は、広角レンズを有する撮像手段と、撮像手段により撮像された画像上の物体のオプティカルフローを検出するオプティカルフロー検出手段と、撮像手段により次回撮像される時の、オプティカルフロー検出手段によりオプティカルフローを検出された画像上の第1の物体の、オプティカルフローを予測するオプティカルフロー予測手段とを備え、オプティカルフロー予測手段は、第1の物体は移動前後で高さの変動を発生せずに前方及び横方向に等速移動するとしてイメージプレーン上の移動予測位置を算出することを特徴とする。
(もっと読む)
141 - 150 / 3,780
[ Back to top ]