
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
121 - 130 / 3,780
接近障害物検出装置及びプログラム
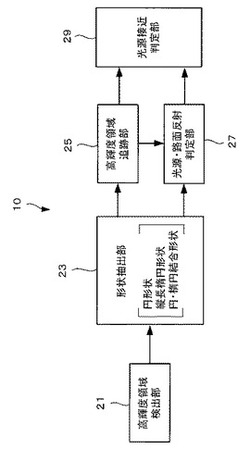
【課題】光源が自車両に接近することを検出して警告する接近障害物検出装置を提供する。
【解決手段】路面反射した光が、光源を起点として、撮影カメラの方向に延びる縦長の楕円形に類する形状を有することに着目して、路面湿潤時に自車両周辺を撮影した画像より、高輝度領域追跡部25が特定の形状からなる高輝度領域の位置及び動きの時間的な変化を検出する。そして、光源接近判定部29は、撮影画像において縦長楕円形で現れる路面反射部分の時間的な移動方向をもとに、自車両に接近してくる光源(自車方向に接近する障害物)を検出する。
(もっと読む)
車両用運転支援装置

【課題】走行路逸脱領域での車両の横方向位置の予測精度を出来る限り高くする。
【解決手段】横方向ずれ量推測部12が、所定時間毎に検出された時系列の横方向ずれ量の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、ARモデルのAR係数又はARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値とする。
(もっと読む)
3次元範囲計測システム、3次元範囲計測プログラムおよび記録媒体
【課題】自動車等の運転者の3次元的な認知領域の広がりを計測することができる3次元範囲計測システム等を提供する。
【解決手段】3次元範囲計測システム1は車両10の車外環境をステレオ計測する2台の広角レンズカメラを有する車外カメラ20と、運転者12の視線方向を計測する車内カメラ30と、車外カメラ20および車内カメラ30に接続されたPC40とから構成されている。車外カメラ20は等距離射影式の魚眼レンズカメラを用い、透視投影モデルに変換しない二眼ステレオ法を考案した。車内カメラ30の座標系XwYwZwを世界座標系とし車外カメラ20の座標系XcYcZcを車内カメラ30の座標系に合わせた。車外カメラ20の計測から得られた車外環境の画像上の隣接する3つの画素毎に三角形パッチを構成する。車内カメラ30の計測から得られた運転者の視直線と三角形パッチとの交点を運転者12の注視点の3次元座標とした。
(もっと読む)
障害物検出装置及び車両制御装置
【課題】障害物の検出精度を向上させることが可能な障害物検出装置を提供する。
【解決手段】障害物検出装置100は、障害物6を検出する検出領域Cを、車両1の進行方向A1に設定する検出領域設定部53と、検出領域C内に位置する障害物6を検出する情報取得装置3及び判断部55と、車両1における操舵操作の操舵方向aを検出する操舵方向検出装置4と、を備え、検出領域設定部53は、検出領域Cにおいて、操舵方向aに対して反対方向に位置する反対部分C2を、車幅方向外側に向って拡大する。
(もっと読む)
対象物検出装置
【課題】人間等の対象物が背景の建造物等の物体と同程度の温度であっても、赤外線を利用して対象物を検出することが可能な対象物検出装置を提供する。
【解決手段】車両周辺監視システム10は、入射された赤外線の強度に応じて赤外線画像を出力する赤外線カメラ11,12と、赤外線カメラ11,12が出力した赤外線画像に基づいて対象物を検出する第1及び第2対象物検出手段102,103とを備える。第2対象物検出手段103は、物体から放射される赤外線の放射率又は赤外線量の波長特性によって対象物を特定する。
(もっと読む)
車両周辺監視装置
【課題】カメラとレーダ装置の組み合わせにより物体の実空間位置を算出するときに、車両と物体間の距離の誤検出により、不適切な実空間位置の算出がなされることを防止した車両周辺監視装置を提供する。
【解決手段】物体距離検出部21によりレーダ装置12の測距データから検出された物体をカメラの撮像画像に投影して、該物体の画像部分を検出する画像部分検出部22と、物体距離検出部21による検出距離に基づいて、物体の実空間位置を算出する実空間位置算出部23と、前記検出範囲内に存在する格子フェンスを検出する半透過物体検出部25と、カメラ11の撮像方向で、格子フェンスと重なる位置に存在する物体については、実空間位置算出部23による実空間位置の算出を禁止する実空間位置信頼性判定部24とを備える。
(もっと読む)
車載用電子機器とそれを搭載した自動車
【課題】本発明は、車載用電子機器において、衝突に対する安全性を高めることを目的とするものである。
【解決手段】この目的を達成するために本発明は、後方自動車の接近を検出する接近センサ3と、この接近センサ3に接続された制御部6と、この制御部6に接続されたドア開放センサ8、シートベルト装着センサ9、および表示部5とを備え、前記制御部6は、前記接近センサ3による後方自動車の接近を検出し、かつ、ドア開放センサ8、およびシートベルト装着センサ9による降車動作を検出した場合に、前記表示部5により後方への降車を報知させる構成とした。
(もっと読む)
車両用障害物検出装置及びそれを用いた車両
【課題】走路上の障害物を検出する障害物検出装置を提供する。
【解決手段】
車両前方を撮影する赤外線カメラ2と、車両前方を撮影するステレオカメラ3と、赤外線カメラ2により撮影された赤外線画像を基に走路を特定する走路特定部5と、ステレオカメラ2により撮影された各画像に基づいてステレオ画像を作成するステレオ画像作成部6と、走路特定部5により特定された走路とステレオ画像とに基づいて、走路上の障害物を特定する障害物検出部7とを備える。
(もっと読む)
車両用外界認識装置及びそれを用いた車両制御システム
【課題】例えば薄暮のように昼間と照明条件が異なるシーンにおいて先行車両を正しく検出することができる車両用外界認識装置を提供する。
【解決手段】車両外形を検出するとともに、車両尾灯を検出し、車両外形と車両尾灯が同期して動いているものを車両と判定する。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
121 - 130 / 3,780
[ Back to top ]