
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
91 - 100 / 3,780
駐車支援装置及び駐車支援方法
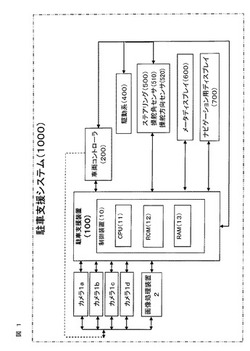
【課題】車両の駐車を支援する際に、設定入力時における視線移動の小さい駐車支援装置100を提供する。
【解決手段】
車両の速度が第1所定値未満である場合には、車両のステアリング500の近傍に設けられたメーターディスプレイ600に駐車支援用の入力補助情報を表示し、車両の速度が第1所定値よりも低い第2所定値未満である場合には、メーターディスプレイ600よりもステアリング500から離隔した位置に設けられたナビゲーション用ディスプレイ700に駐車支援用の入力補助情報を表示するように記入力補助情報を表示するディスプレイを切り替える表示制御機能を実行する制御装置10を備える。
(もっと読む)
運転支援装置

【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】画像処理手段は、車両40の後部に設置された撮像手段1で撮像した車両後方周囲画像から車両40後方に対応する領域を切り出しこれから後方画像を生成するとともに、車両40後方の左右範囲に対応する領域とを各々切り出しこれらから右後方周囲画像と左後方周囲画像とを生成する。そして、後方画像を表示手段の下部に表示するとともに、右後方周囲画像と左後方周囲画像とを表示手段の上部に並べて表示する。その際、右後方周囲画像は表示手段の中央部から右側部へ向かうに従って表示領域が上下に広く表示されるよう生成されるとともに、左後方周囲画像は表示手段の中央部から左側部へ向かうに従って表示領域が上下に広く表示されるよう生成される。
(もっと読む)
信号機認識装置、候補点パターン送信装置、候補点パターン受信装置、信号機認識方法、及び候補点パターン受信方法
【課題】前方画像中における信号機の認識を高い精度と処理速度で実現する。
【解決手段】前方画像中で赤色点で認識される複数の信号候補点P1〜P5を検出し、そのうち赤色点の消灯とともに近傍位置での青色点の点灯が認識される信号確定点P2を検出し、これら信号確定点P2と複数の信号候補点P1,P3〜P5間の幾何的な配置関係を解析した候補点パターンデータを生成、記憶する。同じ交差点に対する同じ進入方向に対応してあらかじめ生成、記憶しておいた候補点パターンデータと、その時点で検出した信号候補点P1〜P5の集合に対して候補点パターンの配置と大きさを照合して当てはめることで、候補点パターンデータ中に設定された信号確定点P2に対応する信号候補点を、実際の信号機の表示位置を示す信号点として認識できる。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】車両の駐車を支援する際に切り返しが必要であるか不要であるかをドライバが判断することができる入力補助情報を提示する駐車支援装置100を提供する。
【解決手段】車両の駐車目標スペースの設定入力時において、自車両の周囲の撮像画像に基づいて生成された複数の駐車可能スペースを含む俯瞰画像に、車両が切り返し無しで駐車できる第1駐車スペース及び/又は前記車両が切り返しをすれば駐車できる第2駐車スペースを重畳させた入力補助情報をディスプレイに提示する入力補助機能と、提示された入力補助情報に基づく駐車目標スペースの設定入力を受け付ける入力受付機能と、を実行する制御装置10を備える。
(もっと読む)
画像処理装置、画像処理システム、カメラ、カメラシステム
【課題】表示画面内の対象物の存在を認識しやすい画像を提供し、危険予知を容易にすることができる画像処理装置、画像処理システム、カメラ、カメラシステム等を提供すること。
【解決手段】画像処理装置100は、赤外線画像データを取得する画像取得部110と、画像取得部110により取得された赤外線画像データに基づく画像領域に対して、画像領域内での対象物を検出する画像処理を行うアラート表示領域と、画像領域内での対象物を検出する画像処理を行わないアラート非表示領域とを設定する領域設定部120と、アラート表示領域の赤外線画像データに基づいて、アラート表示領域における対象物の検出情報を含むアラート表示の画像処理を行ってアラート表示を含む表示用画像データを生成する処理部130とを含む。領域設定部120は、境界線を用いて画像領域を区画する設定パターンを決定し、境界線の位置及び形状のうちの少なくとも一つを定める。
(もっと読む)
車両運転支援装置
【課題】車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することができる車両運転支援装置を提供すること。
【解決手段】車両運転支援装置100は、車両に設置されて周辺の所定範囲を撮影するカメラ10と、カメラ10によって撮影された画像に含まれる区画線を検出する区画線検出部30と、車両の進行方向を判定する進行方向判定部52と、区画線検出部30による検出結果と進行方向判定部52による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離を算出し、車両が後退しているときに車両の後方端部から区画線までの距離を算出する区画線距離算出部50と、区画線距離算出部50によって算出された車両と区画線との間の距離を通知する区画線距離通知部54とを備えている。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 車両の駆動機構のオンオフ情報に基づいて処理モードを設定することで車両の状況に応じた処理モードを自ら設定し、設定した処理モードに応じた処理を行う車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム等を提供すること。
【解決手段】 車載カメラ制御装置100は、赤外線画像データを赤外線画像撮像部210から取得する画像取得部110と、車両の駆動機構のオンオフ情報を取得するオンオフ情報取得部130と、赤線外画像データに基づく処理を行う処理部120とを含み、処理部120は、第1処理モードと、第1処理モードより処理の実行レートが低い第2処理モードを含む複数の処理モードのうちから、オンオフ情報に基づき1つの処理モードを使用処理モードとして設定し、設定された使用処理モードに従って、対象物の検出処理を実行する。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 駐車時に消費電力を抑制しつつ、車両の周囲の監視対象物の監視をすることが可能な車載カメラ制御装置等の提供。
【解決手段】 車載カメラ制御装置は、赤外線画像データと可視画像データを取得する画像取得部110と、走行モードと防犯モードとを含む複数の処理モードのうちのいずれかの処理モードを、使用処理モードとして設定するモード設定部130と、処理部120とを含む。処理部120は、使用処理モードとして走行モードが設定されている場合には、可視画像撮像部220を通常駆動状態に設定し、可視画像データと赤外線画像データとに基づいて、報知用データの生成処理を行い、使用処理モードとして防犯モードが設定されている場合には、可視画像撮像部220を、動作オフ状態又は通常駆動状態よりも消費電力が低い省電力状態に設定し、赤外線画像データに基づく監視対象物の検出処理を行う。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 車両の走行状況に応じて異なる処理を行うことが可能な車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム等の提供。
【解決手段】 車載カメラ制御装置100は、赤外線画像データを赤外線画像撮像部210から取得する画像取得部110と、赤外線画像データに基づく処理を行う処理部120と、外部機器300との通信処理を行う通信部140と、車両が走行状態か否かを判定する走行状態判定部130と、を含む。そして、処理部120は、車両が走行状態であると判断された場合に、赤外線画像データに基づく画像処理を行う。さらに、通信部140は、車両が非走行状態であると判断された場合に、赤外線画像データ又は赤外線画像データに基づく検出情報を、外部機器300に送信する。
(もっと読む)
車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム
【課題】 振動検出情報に基づいて処理モードを設定することで車両の状況に応じた処理モードを自ら設定し、設定した処理モードに応じた処理を行う車載カメラ制御装置、車載カメラ制御システム及び車載カメラシステム等を提供すること。
【解決手段】 車載カメラ制御装置100は、赤外線画像データを赤外線画像撮像部210から取得する画像取得部110と、振動検出部(センサー240)からの振動検出情報を取得する振動検出情報取得部130と、赤外線画像データに基づく処理を行う処理部120とを含み、処理部120は、第1処理モードと、第1処理モードより処理の実行レートが低い第2処理モードを含む複数の処理モードのうちから、振動検出情報に基づき1つの処理モードを使用処理モードとして設定し、設定された使用処理モードに従って、対象物の検出処理を実行する。
(もっと読む)
91 - 100 / 3,780
[ Back to top ]