
国際特許分類[B60R1/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 光学的視認装置 (5,484)
国際特許分類[B60R1/00]の下位に属する分類
後視鏡装置 (1,382)
前視鏡装置;展望鏡装置 (10)
他の物品と組合っている鏡体,例.時計付 (312)
国際特許分類[B60R1/00]に分類される特許
171 - 180 / 3,780
車両用情報伝達制御装置、及び、情報伝達制御方法
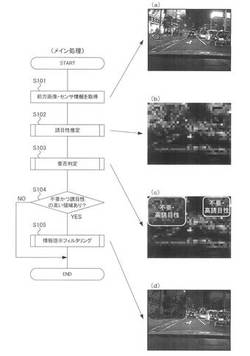
【課題】運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供する。
【解決手段】車載カメラで自車両前方の運転視界画像を撮像し(S101)、その運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する(S102)。つぎに、推定した高誘目性領域が運転行動に必要な情報であるか否かを判定する(S103)。要否の判定は、運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。そして、前記要否判定の結果において運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する(S105)。
(もっと読む)
レーンマーク認識装置

【課題】路面への映り込みの影響により、レーンマークの検出精度が低下することを抑制したレーンマーク認識装置を提供する。
【解決手段】カメラ11の撮像画像から、線状のレーンマークの候補画像を抽出するレーンマーク候補画像抽出部31と、レーンマーク候補画像抽出部31により抽出されたレーンマークの候補画像のうち、車両1の上下方向に相当するy軸方向に、所定範囲内の間隔をもって延びる複数の特定の候補画像を、レーンマークの認識対象から除外する特定候補画像除外部32と、特定候補画像除外部32によりレーンマークの認識対象から除外されなかった候補画像に基づいて、レーンマークを認識するレーンマーク認識部33とを備える。
(もっと読む)
画像認識装置
【課題】自車両の走行道路の状態に拘らず、歩行者の検知漏れや無駄な検知動作をなくすことができる探索領域を設定でき、歩行者の検知性能を向上させることができる画像認識装置の提供。
【解決手段】算出部22は、自車両の旋回に関する情報を含む情報として赤外線カメラ30から前方画像50を取得し、前方画像50の計算領域66のオプティカルフローを計算することで、方向ベクトルを算出し、その方向ベクトルの水平方向成分を走行道路のカーブの方向に関する情報として算出する。そして、探索領域設定部24は、水平方向成分に基づいてカーブの方向を判定し、歩行者を表す画像58を探索するための探索領域52を、探索領域52の前方画像50における大きさはそのままに、判定したカーブの方向に向けて移動させた位置に設定する。そして、認識部28がその位置に設定された探索領域52内の歩行者を表す画像58を検知する。
(もっと読む)
環境認識装置および環境認識方法
【課題】水蒸気や排気ガス等の浮遊物を精度よく検出する。
【解決手段】環境認識装置130は、検出領域122内に存在する対象部位の、自車両1に対する相対距離を含む位置情報を取得する位置情報取得部160と、位置情報に基づき、複数の対象部位をグループ化して対象物とするグループ化部162と、対象物の画像における輝度を取得する輝度取得部164と、対象物の画像における輝度のヒストグラムを生成する輝度分布生成部166と、ヒストグラムに対する統計解析により、対象物が浮遊物か否かを判断する浮遊物判断部168と、を備える。
(もっと読む)
車載カメラシステム、電気自動車、および車載カメラによる監視制御方法
【課題】バッテリーの消耗の抑制と、車載カメラによる長時間の撮影との両立を可能とする、車載カメラシステムを実現する。
【解決手段】車載カメラシステムユニット100は、バッテリー11を備えた電気自動車101を備える。電気自動車101は、バッテリー11が放電した電力によりシステム用電源12を動作させる第1動作と、少なくとも充電用系統電源10が出力した電力によりシステム用電源12を動作させる第2動作とを切り替える切替部9とを備える。切替部9は、充電用系統電源10によるバッテリー11の充電時に、第1動作から第2動作への切り替えを行う。
(もっと読む)
車両用端末のためのユーザーインターフェース方法、装置、及びこれを具備する車両
【課題】車両の運行においてユーザーの安全運行をはかる車両用端末のためのユーザーインターフェース方法及び装置を提供する。
【解決手段】位置情報を獲得してどの道路のどの地点であるかを把握する段階S401と、運行方向の道路の画像を獲得して、獲得した道路の画像に示される車路を認識してどの車路に位置するのかを把握する段階S403と、前記の認識された車路に対する仮想車路を生成して、これを前記の運行方向の道路の画像に付け加えて表出する段階S405及び前記の把握された該当の道路の地点で車路別交通情報及び周辺情報を獲得して、これを前記の仮想の車路別に知らせる段階S407を含む。
(もっと読む)
環境認識装置および環境認識方法
【課題】夜間や雨等、光源が拡散し易い環境において、壁でないものを壁と誤判断することを抑制する。
【解決手段】環境認識装置130は、検出領域内に存在する対象部位の、自車両に対する相対距離を含む位置情報を取得する位置情報取得部160と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が第1所定距離内に連なる複数の対象部位をグループ化して対象物とするグループ化部162と、対象物を構成する複数の対象部位が、自車両の進行方向に垂直な面に対して所定角度以上に傾斜する傾斜面を形成すると、壁の候補である壁候補と判断する候補判断部164と、自車両の進行方向に垂直な水平距離の差分および自車両の進行方向に平行な相対距離の差分が、第1所定距離より長い第2所定距離内に連なる複数の壁候補を、壁であると判断する壁判断部166と、を備える。
(もっと読む)
環境認識装置および環境認識方法
【課題】曲線を描いたり、それ自体が傾斜したりする対象物の特定効率および特定精度の向上を図る。
【解決手段】環境認識装置130は、検出領域内を分割した複数のブロック毎の輝度を取得し、ブロック毎の輝度のエッジが伸長する方向に基づくエッジ方向を導出し、エッジ方向に基づいてブロック同士を関連付け、エッジ軌跡を生成し、複数のエッジ軌跡により囲まれる領域をグループ化して対象物とし、対象物を特定物として決定する。
(もっと読む)
画像処理装置
【課題】自車両の前方に存在する物体を精度良く判別することが可能な技術を提供する。
【解決手段】画像処理装置は、車両前方を複数の露光条件で撮像した複数の撮像画像の画像情報を取得し、該複数の撮像画像の画像情報に基づいて発光体又は光反射体として車両前方に存在する物体の属性を判別する属性判別部を備える。車両前方を撮像する撮像部を更に備えてもよい。撮像部は、所定の期間において露光量が異なる複数の露光条件で車両前方を撮像し、撮像した複数の撮像画像の画像情報を属性判別部へ出力してもよい。
(もっと読む)
画像表示システム、画像処理装置、及び、画像表示方法
【課題】車両の周辺を示す画像において、車両の周辺に存在する物体の方向や位置を気づかせることができる技術を提供する。
【解決手段】画像表示システムは、車両の互いに異なる位置に設けられ、それぞれ車両の周辺に存在する物体を検出する複数の検出手段のうち物体を検出した特定検出手段と物体とを示唆する枠の形態で表した指標を周辺画像へ重畳して表示する。このため、ユーザは物体の方向と位置とを明確に認識できる。
(もっと読む)
171 - 180 / 3,780
[ Back to top ]