
国際特許分類[B60T8/171]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
国際特許分類[B60T8/171]に分類される特許
41 - 50 / 161
パワーユニットの駆動輪速度センサ保護構造

【課題】単独の保護部品を用いず、取付け作業を必要としない簡単な構造の駆動輪速度検出センサ保護構造を供する。
【解決手段】ベルト式無段変速機を収容する伝動ケース31Lが後部に軸支された後車軸に駆動輪を嵌着して支持するパワーユニット20が、前部を車体フレーム4に軸支されて揺動可能に支持され、駆動輪21の回転速度を後車軸と一体の歯車114の回転から検出する駆動輪速度検出センサ200が、その先端検出部を伝動ケース31Lに嵌入して歯車114に近接させて取り付けられた車両のパワーユニット20において、駆動輪速度検出センサ200の伝動ケース31Lより外側に露出した突出部の近傍に伝動ケース31Lと一体に保護壁29,150が突出形成されたパワーユニットの駆動輪速度検出センサ保護構造。
(もっと読む)
車両における少なくとも1つのホイールのロケーティングのための方法、センサ、検出器及びシステム
本発明は車両(1)における少なくとも1つのホイール(2a〜2d)のロケーティングのための方法に関する。ここでは、
a)ホイール(2a〜2d)に取付けられている第1のセンサ(4a〜4d)からのホイール(2a〜2d)位置(P1〜P6)を示す信号(S4a〜S4d)を受信するステップと、
b)ホイール(2a〜2d)の角度位置を測定しさらに車両(1)の特定の位置に対応付ける第2のセンサ(5a〜5d)の測定値(S5a〜S5d)を受信するステップと、
c)前記測定値(S5a〜S5d)に関する第1の信号(S4a〜S4d)の位相位置(W1a〜W3a,W1b〜W1b)を確定するステップと、
d)前記位相位置(W1a〜W3a,W1b〜W1b)が所定の監視期間において所定の許容範囲(WTa,WTb)内に留まっている場合に、第2のセンサ(5a〜5d)に第1のセンサ(4a〜4d)を割当てるステップが含まれる。 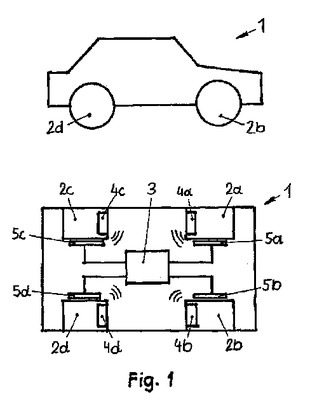 (もっと読む)
(もっと読む)
移動体の運動制御用センサシステムおよび運動制御システム

【課題】移動体のコーナーリング時の走行安定性制御に適切な移動体の運動制御用センサシステムおよび運動制御システムを提供する。
【解決手段】移動体のばね下に物理量センサを設置することで、ばね下における物理量をばねを介さず検出できるようにした。移動体のばね下に働く加速度を検出する加速度センサ(加速度センサヘッド131)は、検出軸が移動体の操作軸(転舵軸S)に交わるように設置することで、操作軸周りの角加速度による加速度が検出されないようにした。
(もっと読む)
電磁弁制御装置
【課題】電磁弁で発生する発熱量の増加を抑制しつつ、作動状態から不必要に非作動状態になった電磁弁を速やかに作動状態に復帰させることができる電磁弁制御装置を提供する
【解決手段】ECUは、作動状態にある電磁弁の電磁コイルに対して保持電流Ihldを供給し、電磁弁の作動状態を維持させる。この状態で外部からの外乱によって電磁弁が不必要に作動状態から非作動状態に切り替った又は切り替りつつある場合には、電磁コイルにおける電流値IRが変動する(第3タイミングt3)。この際、ECUは、電磁コイルにおける電流値IRの変動から電磁弁が不必要に作動状態から非作動状態に切り替った又は切り替りつつあると判定し、電磁コイルに対して作動電流Istを供給させ、その後、電磁コイルに対して保持電流Ihldを供給させる(第4タイミングt4)。
(もっと読む)
ブレーキ制御装置
【課題】複数系統のブレーキ液路を介して各ホイールシリンダに供給されるブレーキ液のブレーキ液圧をブレーキ液路毎に検出できると共に、それらの検出結果に基づき所望どおりにブレーキ液圧を的確に制御することができるブレーキ制御装置を提供する。
【解決手段】マスタシリンダ17から第1ブレーキ液路18及び第2ブレーキ液路19を介して供給されるブレーキ液のブレーキ液圧に応じた制動力を対応する車輪に付与するホイールシリンダ20a〜20dと、各ホイールシリンダ20a〜20dに供給されるブレーキ液のブレーキ液圧を検出するホイールシリンダ圧センサ71と、そのセンサ71の検出対象を各ブレーキ液路18,19間で相互に切り替え可能な切り替え弁69とを設けた。
(もっと読む)
車輪速センサー取付装置
【課題】車輪速センサー21とパルサーリング22との間のエアギャップGの積み上げ公差を低減できる、車輪速センサー21の取付装置1を提供すること。
【解決手段】車軸13に回転自在に支持されたホイール14に固定されたパルサーリング22に対して、車軸方向に所定のギャップを有して配置される車輪速センサー21の取付装置1において、前記車軸13の外周面に嵌合すると共に前記ホイール14に対して車軸方向に位置決めされるカラー23と、カラー23の外周面に嵌着されると共に、前記車輪速センサー21が取り付けられるセンサーブラケット25と、を備え、センサーブラケット25は、カラー23に形成された係止面に当接してセンサーブラケット25の車軸方向の位置決めを行う第1位置決め面Aと、車輪速センサー21が当接しセンサーブラケット25に対して車輪速センサー21の車軸方向の位置決めを行う第2位置決め面Bと、を有し、第1位置決め面Aと第2位置決め面Bとが、車軸13と略直角な同一平面内に形成されている、ことを特徴とする。
(もっと読む)
回転制御装置
【課題】車輪等の負荷がかかった回転体の回転速度の変化を簡単な構成で検出できる回転制御装置を提供する。
【解決手段】接触路面による所定の負荷がかかった状態で回転するタイヤ2に2つのセンサユニット100A,100Bを180度回転対称な位置に装着し、それぞれのセンサユニットに備わる回転接線方向の加速度を検出する加速度センサの検出値を無線送信して、駆動制御ユニット200Aにより受信し、一方の加速度センサによって検出された回転接線方向の加速度の値と他方の加速度センサによって検出された回転接線方向の加速度の値との和の値を算出し、スタビリティ制御ユニット700によってこの加算値と予め設定されている所定の閾値とを比較し、比較結果に基づいてタイヤ2の回転駆動を制御する。
(もっと読む)
車輪速度演算装置
【課題】車輪速度センサから出力されるパルス信号のエッジに基づいて、車輪速度を演算する車輪速度演算装置において、エッジが未検出である場合に、実際の車輪速度の変化を反映させつつ、そのエッジが未検出である間の車輪速度を推定することができる車輪速演算装置を提供すること。
【解決手段】車輪の推定移動距離Dnに基づいて、エッジが未検出である期間における車輪速度を推定する。この車輪の推定移動距離Dnは、エッジが検出された時点の車輪速度におけるトレンドの変化線の傾きAnを考慮して推定されるので、実際の走行に近い状態で距離を推定できる。そして、この推定移動距離Dnを用いて、次のエッジが検出されるタイミングを予測し、そのタイミングを考慮して、エッジが未検出である期間における車輪速度を推定すれば、その推定に、実際の車輪速度の変化を反映させることができる。
(もっと読む)
電動ブレーキ倍力装置
【課題】 アシスト力を付与できなくなった場合であっても、ブレーキ液圧の低下を抑制することができる電動ブレーキ倍力装置を提供すること。
【解決手段】 ブレーキアシスト力を付与する推力発生機構が故障したときには、ホイールシリンダのブレーキ液圧を保持するようにした。
(もっと読む)
移動体の状態推定装置及び移動体の状態推定方法
【課題】移動体に搭載されたセンサに周期的な振動が伝達されたことに起因して該センサが出力した信号に周期的な変動が加わった場合であっても、一つのセンサに対する増幅回路を増加させることなく、センサからの信号に基づき移動体の状態を推定できる移動体の状態推定装置及び移動体の状態推定方法を提供する。
【解決手段】制御回路は、加速度センサから入力した加速度信号に基づき暫定加速度Gypを時系列的に演算する。そして、制御回路は、時系列的に演算した各暫定加速度Gypに基づく実波形から最小二乗法を用いて車両の横方向加速度Gyを演算し、演算結果に基づき車両状態を推定する。
(もっと読む)
41 - 50 / 161
[ Back to top ]