
国際特許分類[B60T8/171]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
国際特許分類[B60T8/171]に分類される特許
61 - 70 / 161
液圧制御ユニットおよびブレーキ制御用液圧制御ユニット
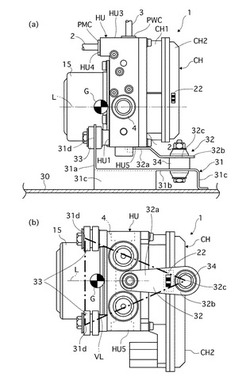
【課題】 ポンプを有するユニットと、車両の運動量を検出する物理量センサを有するユニットとが一体となった液圧制御ユニットにおいて、物理量センサの出力誤差を抑制することができる液圧制御ユニットおよびブレーキ制御液圧制御ユニットを提供すること。
【解決手段】 内部にポンプが内蔵され、対向する2面を有するハウジングと、前記ハウジングの一側面に固定され前記ポンプをモータ軸により回転駆動するモータと、前記ハウジングの他側面に配置され当該モータを制御する制御部と、前記制御部を覆うカバー部と、前記制御部に一体的に固定された車両の運動量を検出する物理量センサと、前記ハウジングを車両に弾性的に固定する複数のマウント部とを備え、前記複数のマウント部の間であって前記ハウジンおよびカバー部が占有する領域内に前記物理量センサを配置した。
(もっと読む)
車両および診断装置

【課題】 磁気ロータの異常を検出することが可能な磁気式回転検出装置と、これを用いた車両制御装置を提供する。
【解決手段】 磁気ロータ10の回転に伴い、磁気ロータ10の外周に配置された磁石11が移動することによって生ずるピックアップ15周囲の磁束変化をピックアップ15で検出し、その出力変動が磁気ロータ10の回転に対して定期的に発生する場合に、磁石11の配列ピッチ異常等の磁気ロータ10の異常状態と判定する。
(もっと読む)
車両の運動制御装置
【課題】車両が急激に不安定になってしまう事態を防止あるいは抑制する。
【解決手段】コントローラUによって、目標横力、目標前後力、目標ヨーモーメントとなるように、前後左右の各タイヤ1FL〜1RRへの横力fxiおよび前後力fyiが変更制御される(i=1〜4で各タイヤの識別子)。タイヤ力検出センサ20で検出されたタイヤ力と、各タイヤで得られる最大タイヤ力fmaxiとに基づいて、各タイヤの負荷率ηiが決定される。前後左右のタイヤを対角線上に位置する2つのタイヤ同士で対をなす2組のタイヤ対に分けて(1FLと1RR、1FRと1RL)、対となるタイヤの負荷率(η1とη4、η2とη3)が互いに均等となるように各タイヤのタイヤ力が変更制御される。
(もっと読む)
ブレーキ力検出装置
【課題】 ブレーキをかけた方向にかかわらず常に正確なブレーキ力を検出可能なブレーキ力検出装置を提供することである。
【解決手段】 ブレーキ力検出装置であって、キャリパブラケットに生じるブレーキ時の歪を検出する歪ゲージと、歪ゲージの検出値からブレーキ力を算出するブレーキ力算出手段と、今回のブレーキが前進状態におけるブレーキか、後退状態におけるブレーキかを判別する前進・後退ブレーキ状態判別手段とを含んでいる。ブレーキ力算出手段は、前回のブレーキと今回のブレーキが同一方向の場合は、前回のブレーキと今回のブレーキが反対方向の場合に対して、同一の検出値に対して算出されるブレーキ力が低くなるように補正する補正手段を含んでいる。
(もっと読む)
荷重検出機構付車輪支持用軸受ユニット
【課題】取付位置の精度誤差を許容でき、軸受ユニットの組立後でも比較的簡単に取り付け可能な荷重検出機構を有する荷重検出機構付車輪支持用軸受ユニットを提供する。
【解決手段】軸受ユニット10は、外輪部材12に固定されるエンドキャップ30に設けられる発光素子41及び受光素子42と、ハブ11と一緒に回転するようにハブ11に固定される反射部材43に設けられ、発光素子41の発光を受光素子42に向けて反射可能な反射面46と、を備え、受光素子42の受光結果に基づいて負荷荷重を検出する荷重検出機構40を有する。
(もっと読む)
応力測定装置およびこれを用いた応力測定方法
【課題】被測定部材の強度信頼性を維持し、かつ応力を再現性良く検知可能な応力測定装置および応力測定方法を提供する。
【解決手段】被測定部材に力が加えられたとき、力に応じて圧縮応力が生ずる被測定部材の圧縮部に取り付けられ、離隔して対をなす脚部16A,16Bと、脚部の間に配置される板状の起歪部11と、起歪部の平面に設けられる力学量センサ19と、を有する。
(もっと読む)
車輪速度補正装置
【課題】定常円旋回などの定常旋回走行時であっても、異径タイヤ装着等によって生じる左右輪の車輪速度差の誤差を補正可能とする。
【解決手段】左右輪の実速度比に基づいて旋回半径R1を算出し、この旋回半径R1と車速から車体の横加速度を算出する(ST2〜ST4)。次に、実速度比に基づいて算出した算出横加速度が、タイヤグリップ限界等を考慮して設定した上限値(0.5G)を超えているか否かを判定し、算出横加速度が上限値を超えているときには、横加速度が上限値になるように後輪左右の基準速度比を逆算して左右輪の車輪速度の補正係数を算出し、この補正係数を用いて車輪速センサの各出力信号(生データ)を学習補正する(ST5〜ST8)。このように車体の横加速度(旋回半径)に基づいて学習補正を行うことによって、定常旋回走行時に後輪左右の車輪速度の誤差を低減する補正を実施することができる。
(もっと読む)
車両の電動モータ出力制御装置
【課題】車両の電動モータ出力制御装置において、車速が低速である場合に電動モータの出力を低減して静粛性を向上させる。
【解決手段】車両の電動モータ出力制御装置は、車両速度取得手段(ステップ408)によって取得した車両の速度が、運転者が電動モータの作動音を識別可能な速度の場合、モータ駆動制御手段(ステップ402〜410、314)が電動モータの出力を低下させる。これにより、車両速度(車速)が運転者が電動モータの作動音を識別可能な速度の場合、電動モータの回転数(出力)を適切かつ十分に低減することにより、静粛性を向上させることができる。
(もっと読む)
自動走行車両および追尾システム
【課題】安定した隊列走行を実現すること。
【解決手段】先導車両に追従して自動走行する自動走行車両であって、前方車両との車間距離に応じて走行速度を制御する制御装置を具備する自動走行車両を提供する。
(もっと読む)
自動二輪車の車速センサ
【課題】車速センサから引き出されるハーネスに余分なたるみが生じないようにする。
【解決手段】自動二輪車1の後車軸8はアジャストプレート16やアジャストボルト18等からなる調節手段により車体前後方向に位置調節可能である。車軸8に支持されているキャリパブラケット14に取り付けられている車速センサ22から車体前方向に延伸されているハーネス23がスイングアーム3上にクランパ26でガイドされて保持される。クランパ26より前方向にハーネス23の後方向への動きを規制するストッパ27が設けられ、ハーネス23が車軸8の位置調節手段の調節幅とほぼ同じ変位量の範囲でクランパ26に対して変位自在とする。
(もっと読む)
61 - 70 / 161
[ Back to top ]