
国際特許分類[B62D6/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 走行状態を検出した結果,及び走行状態に感応した結果に応じて自動的に操向装置を制御する装置,例.制御回路 (4,661)
国際特許分類[B62D6/00]の下位に属する分類
車両速度にのみ感応するもの (34)
車両の所期進路を乱す力,例.車両の走行方向に対して横に作用する力,にのみ感応するもの (4)
車両の振動減衰装置にのみ感応するもの
入力トルクのみに感応するもの
国際特許分類[B62D6/00]に分類される特許
51 - 60 / 4,623
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
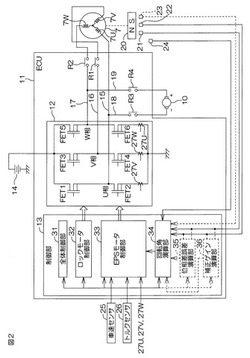
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
運転支援装置

【課題】車輪の縁石への接触もしくは側溝への脱輪の発生するおそれがある場合の警告にステアリングの操舵力制御を用いることで、車輪の縁石への接触や側溝への脱輪を効果的に抑制する。
【解決手段】撮像手段13、14と、障害物検出手段15と、距離算出手段16とを備えた運転支援装置12において、車輪速検出手段19と、操舵角検出手段20と、操舵制御手段21と、検出された車輪速と検出された操舵角とから車輪の進路を予測する進路予測手段22と、縁石または側溝が検出された場合、予測された車輪の進路と算出された縁石または側溝と車輪との距離とに基づいて車輪が縁石または側溝に予め設定された時間内に到達するかどうかを判定する判定手段23と、車輪が縁石または側溝に予め設定された時間内に到達すると判定された時には操舵反力を大きくする制御装置18とを備えることを特徴とする。
(もっと読む)
目的走行位置設定装置及び操舵制御システム
【課題】走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定し、設定した目標走行位置で車両を走行させる。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵操作に対する運転者の意図の反映度合いが低下することを抑制可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】自車両が有する操舵輪の目標とする回転角度である目標操舵角を算出し、操舵輪の現在の回転角度である現在操舵角を検出し、目標操舵角と現在操舵角との差分である操舵角偏差を算出し、操舵角偏差を縮小させるための操舵支援トルクを算出し、自車両が走行する走行路上において、操舵輪の回転角度を目標操舵角とした状態で自車両が通過すると予測する目標経路上の点である目標点に自車両が到達した時点における、自車両の車幅方向右側及び車幅方向左側のうち少なくとも一方に存在する障害物と自車両との間の距離である余裕代を算出し、算出した余裕代が大きいほど小さい値に算出した操舵支援トルクを操舵輪へ出力する。
(もっと読む)
電動パワーステアリング装置
【課題】 自動停止条件の成立後に操舵トルクが増加する場合であっても、操舵トルクの急変を抑制可能な電動パワーステアリング装置を提供する。
【解決手段】 電動パワーステアリング装置10は、ステアリング系20の操舵トルクを検出する操舵トルクセンサ41と、ステアリング系20に補助トルクを与える電動モータ43と、操舵トルクに基づく目標電流値で電動モータ43のモータ電流値を制御するモータ電流制御部42と、を備える。モータ電流制御部42は、自動停止条件が成立するとエンジンを停止させるアイドリングストップ制御部100の自動停止条件が成立することに起因して、目標電流値を目標電流上限値以下に設定する。目標電流上限値は、目標電流値を目標電流上限値以下に設定することを開始した時Tsの目標電流値Imsと関連する。
(もっと読む)
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
運転支援装置
【課題】修正操舵を抑えつつ車線に沿った安定した走行を可能とする。
【解決手段】ステアリングバイワイヤ方式の操舵装置を備える。運転者が操舵する操作子の操舵量の変化に伴い周期的に付与操舵反力を操作子に入力し、一方向に向けた連続する操舵入力中に発生した上記付与操舵反力の数を検出する。そして、本発明は、検出した付与操舵反力の数に応じて、車線に沿って走行するための走行経路を選択し、選択した走行経路に沿って走行するように転舵輪4の転舵を制御する。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両制御装置
【課題】制御特性を走行路に適したものとするために周回路などの走行環境を容易に判定できる車両制御装置を提供する。
【解決手段】車両に対する入力とその入力に応じて車両が示す挙動との関係である制御特性を変更できる車両制御装置において、前記車両が走行して得られた走行軌跡を記憶する(ステップS3)とともに記憶されている走行軌跡に基づいて同一走行路を走行していることを判定し(ステップS4)、同一走行路を走行していることの判定が成立した場合には前記制御特性をその走行路に適する特性に設定する(ステップS5)ように構成されている。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
51 - 60 / 4,623
[ Back to top ]