
国際特許分類[B63H25/42]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
国際特許分類[B63H25/42]に分類される特許
141 - 150 / 243
船外機の操舵装置および船外機

【課題】船内のブラケットのチルト軸周りの構造を単純化し、ステアリング装置の複雑な取付け作業を簡素化すると共に、ブラケット周辺のスペースを広くした操舵装置および船外機を提供する。
【解決手段】船舶の船尾板に取り付けられたスイベルブラケット30と、上記スイベルブラケット30のスイベル軸31に回転可能に取り付けられた船外機と、上記船外機に設けられ、前記船外機をスイベル軸周りに回転させる駆動手段(電動モータ16)とを有する。上記船外機は船外機本体35を有し、上記駆動手段は上記船外機本体35のカウリング40内部に設けられるものである。
(もっと読む)
航走制御装置およびそれを備えた船舶

【課題】操作量に対する目標転舵角の関係を定める特性を予め準備することなく、操船特性を確実に改善できる航走制御装置を提供する。
【解決手段】ゲイン算出部69は、収集されたヨーレート、エンジン回転速度および転舵角のデータに基づいてゲインを算出し、エンジン回転速度およびゲインのデータは、学習データとして記憶部60に格納される。この学習データに基づいて、エンジン回転速度−ゲイン特性(N−K特性)が算出される。さらに、エンジン回転速度とゲインとの目標特性(目標N−K特性)と、前記算出されたN−K特性とに基づき、目標N−K特性を実現するためのエンジン回転速度−ステアリング操作角−目標転舵角特性(N−S−R特性)が求められる。このN−S−R特性に従って、ステアリング操作角に対する目標転舵角がエンジン回転速度に応じて設定される。
(もっと読む)
航走制御装置およびそれを備えた船舶
【課題】簡便な操作で操船特性を調整することができる航走制御装置を提供する。
【解決手段】目標特性入力部9は、エンジン回転速度およびステアリングホイールの操作量に対する船舶のヨーレートのゲインの目標特性を変更するために操作者によって操作される。目標特性入力部9は、目標特性ラインを表示する表示装置15と、タッチパネル75および十字ボタン76を含む入力装置14とを備えている。入力装置14の操作により、目標特性ラインの第1変曲点71および第2変曲点72の位置を変更することができる。特性変更ボタン84を操作することによって、目標特性ラインの変更が確定する。変更後の目標特性が達成されるように、エンジン回転速度とステアリングホイールの操作量と目標転舵角との関係を表すマップが更新される。
(もっと読む)
船舶の砕氷特性を改善する方法およびこの方法によって構成した船舶
氷進入特性を改善した船舶、特に砕氷船または貨物船、タンカ若しくは類似の運搬船を提供する方法およびこの方法によって製造した船舶で、この船舶は、第1端(2)および第2端(3)を備える船殻(1)を有し、上記第2端に、この船舶がどちらかの端を先にして動く間、この船舶に主推力を与える推進設備、およびこの船舶の操縦装置を備え、それで、この船舶の上記第2端(3)が、それだけで、効率的氷貫入特性を有するような形状および設計になっている。上記推進設備は、少なくとも三つの推進装置を含むように選択してあり、少なくともその過半数が舵プロペラ装置(4)であり且つこの船舶の前記第2端(3)から少なくとも二つの異なる距離に配置してあり、それでこの船舶が上記第2端(3)を先にして氷または凍結層の中を動くとき、この船舶の上記第2端(3)近くに位置する一つ以上の推進装置を備えるプロペラが砕氷するように構成してありおよびこの船舶の上記第2端(3)から更に離れて位置する一つ以上の推進装置を備えるプロペラが崩壊した氷または氷塊をこの凍結層から引き離すように構成してある。 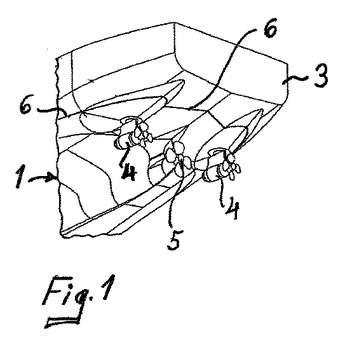 (もっと読む)
(もっと読む)
1軸1舵船の定点位置保持方法とその装置
【課題】 1軸1舵船において、船舶を安定して定点保持できる定点位置保持方法を提供すること。
【解決手段】 船体6の目標位置側を目標位置TPに向けるように船首5の方位を制御するとともに、この目標位置TPに対する現船位SPの相対位置が前後方向にずれている場合は前後進制御によって船位SPを目標位置TPに留めるように制御し、この目標位置TPに対する現船位SPの相対位置が左右方向にずれている場合は左右進制御によって船位SPを目標位置TPに留めるように制御して、前後左右の制御の切り換えにより船位SPを目標位置TPに留める。
(もっと読む)
船舶用スラスタ装置取付構造及び船舶
【課題】スラスタ装置を船尾板の外側から容易に取り付けでき、エンジン室が狭い船舶にも取り付けが可能な船舶用スラスタ装置取付構造を提供する。
【解決手段】推力発生部17と動力部18とを有するスラスタ装置16を船体の船尾板14に取り付ける構造であって、スラスタ装置16は、推力発生部17と動力部18とが予め組み立てられていると共に、推力発生部17と動力部18との間には、周囲に取付フランジ部19が形成される一方、船尾板14の所定位置には、動力部18が挿通可能な大きさの挿通孔14aが形成され、スラスタ装置16の動力部18を、船尾板14の外側から挿通孔14aに挿入し、取付フランジ部19を、船尾板14の外側に取り付けた。
(もっと読む)
間欠仕様の操船装置
【課題】船艇を微速移動させるとともに容易に操作できる応答性のよい操船装置を提供する。
【解決手段】X軸、Y軸及びZ軸の3軸回りに回転自在であって、それぞれの軸回りの回転角を検出するジョイスティックレバー24及び、ジョイスティックレバー24から取得したX軸及びY軸回りの回転角に基づいて船艇の移動速度及び移動方向を決定し、ジョイスティックレバー24から取得したZ軸回りの回転角に基づいて船艇の回転速度及び回転方向を決定し、決定された船艇1の移動速度、移動方向、回転速度及び回転方向に基づいてエンジン2、3、クラッチ機構4、5及びバウスラスタ10の動作を制御する制御機構25を有する第二操作機構23を具備する操船装置であって、前記第二操作機構23の制御機構25は、決定された移動速度、移動方向、回転速度及び回転方向に応じたパルス信号をクラッチ機構4、5及びバウスラスタ10に送信することとした。
(もっと読む)
基本の撮像エリア内に離着岸可能とする船舶自動離着岸システム
【課題】従来、船舶を、港湾の岸壁に接岸させる際において、船舶側に搭載された接岸自動システム、又は接岸用操船設備を介して、いかなる港湾(各形態の港湾)であっても、安全・迅速・自動的に接岸できること等を目的とする。しかし、現実は、なかなか理想通りにはいかなく、その改良が望まれている。またコストが比較的安価であって、操作が容易なものが望まれている。
【構成】本発明は、船舶の離着岸目標物を含む設定エリアの離着岸画像部位を撮像・検知する左右舷用の2台の撮像手段・検知手段と、撮像手段・検知手段で撮像された画像・検知された記録を表示・入力可能な中央管理手段と、中央管理手段で、基本の撮像・検知記録と、撮像された画像・検知された記録とを比較制御した制御結果の入力を基に船舶の操舵を司るドライブポンプユニットとを介して左右舷に指令を発し、船舶を、基本の撮像エリア内に離着岸可能とする。
(もっと読む)
バウスラスタと旋回式スラスタを有する2軸船の推力制御方法及び装置
【課題】 1入力1出力系の制御系を構築できるようにする。
【解決手段】 バウスラスタと旋回式スラスタを有する2軸船の船体固定座標上における左右の旋回式スラスタ2a,2bと、バウスラスタ3の幾何学的配置から、各スラスタ2a,2b,3の推力を要素とする(Fb,T1,T2,T3,T4)tと、上記各スラスタ2a,2b,3の推力が船体1に与える前後力Xと横力Yと回頭モーメントNを要素とする(X,Y,N)tとの伝達を示す行列式を求める。この行列式の逆問題を最小右変換により解いた行列式を用いて、バウスラスタと旋回式スラスタを有する2軸船に希望の動きを行わせるため船体1に作用させることが要求される前後力Xと横力Yと回頭モーメントNから、各スラスタ2a,2b,3で発生させるべき推力Fb,T1,T2,T3,T4の組み合わせを求める。
(もっと読む)
バウスラスタを有する2軸2舵船の推力制御方法及び装置
【課題】 調整を要するパラメータの数を削減できるようにする。
【解決手段】 バウスラスタを有する2軸2舵船について、左右両舷側の舵3a,3bの舵角を固定した条件の下で、船体1上における上記左右のプロペラ2a,2bと、バウスラスタ4との幾何学的な配置を基に、それぞれの推力を要素とする(Fb,TL,TR)tと、船体1に作用する前後力Xと横力Yと回頭モーメントNを要素とする(X,Y,N)tとの伝達マトリックスを示す行列を求める。バウスラスタを有する2軸2舵船に希望する動きを行わせるために船体1に作用させることが要求される力の3方向成分としての前後力Xと、横力Yと、回頭モーメントNが与えられると、これを要素とする(X,Y,N)tに、上記伝達マトリックスの逆行列を掛けることで、上記バウスラスタ4及び左右のプロペラ2a,2bでそれぞれ発生させるべき推力(Fb,TL,TR)tを求める。
(もっと読む)
141 - 150 / 243
[ Back to top ]