
国際特許分類[B64D45/00]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 航空機の装備;飛行服;パラシュート;動力装置または推進伝達機構の設備または装置 (1,687) | 他に分類されない航空機の指示計器または保護設備 (272)
国際特許分類[B64D45/00]の下位に属する分類
避雷装置 (26)
着陸援助装置;地表との衝突をさけるための安全装置 (43)
国際特許分類[B64D45/00]に分類される特許
51 - 60 / 203
ホバリング可能な航空機、航空機操縦支援方法及びインターフェイス
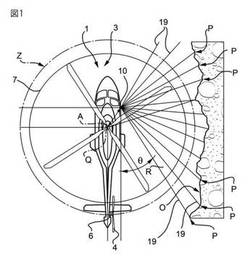
【課題】オペレータ側の判断ミスと、オペレータとパイロットとの間のコミュニケーション不良との両方または一方によって引き起こされる航空機と障害物との衝突を防止するように構成された航空機を、簡単かつ低コストのやり方で提供する。
【解決手段】ホバリング可能な航空機(1)であって、平面掃引領域(R)を有し、かつ前記航空機(1)が操縦飛行しているときに前記平面掃引領域(R)内に在る障害物(O)上の第1の点(P)と前記航空機(1)上の第2の点(Q)との間のそれぞれの距離値(C)を入手するように構成された少なくとも1つのセンサ(10、10’、10”)と、前記第1の点(P)のうちの少なくとも1つが前記航空機(1)上の前記第2の点(Q)を含む安全領域(Z)内に在るときに警告信号を発するように構成された制御ユニット(20)とを有する航空機。
(もっと読む)
意志決定点の情報をモニタする方法、およびそれを応用した航空機衝突防止装置

【課題】パイロットなどの操縦の意志決定を判断する手法を開示したことで、従来のアルゴリズムと全く異なる情報を与える方法,及び装置を実現する。
【解決手段】任意の時刻、t0およびtにおける2つの状態が定義され、時刻t0において、時刻tの状態に遷移するような状態遷移のトリガが与えられたとき、当該遷移状態を記述するyはk(カッパ)を拡散係数,nを反応次数として y=1−exp[−(kt)n] で定義され、この式を変形した式ln・ln(1−y)−1=n・lnt+const.に従ってln・ln(1−y)−1とlntの関係にプロットしたとき、t=t0の前後の関係が直線関係または直線関係と部分的に近似できる場合に、それらの直線関係または直線関係と部分的に近似できる線分の支点(P1)で意志決定が行なわれたと判断する、意志決定の判断方法。および当該方法を用いた航空機衝突防止装置
(もっと読む)
赤外線撮像装置及び赤外線画像の表示方法
【課題】航空機の離着陸時や飛行時に障害となる特定対象を操縦士が容易に認識できるように赤外線画像を表示することができる赤外線撮像装置及び赤外線画像の表示方法の提供。
【解決手段】航空機に搭載される赤外線撮像装置であって、前記航空機に固定され、被写体から放射される赤外線を検知する検知部と、前記検知部から順次出力される信号に基づいて前記被写体の二次元の温度情報を生成する処理部と、前記二次元の温度情報に基づく赤外線画像を表示する表示部とを少なくとも備え、前記処理部は、前記二次元の温度情報に基づいて前記被写体から予め設定した特定対象を抽出し、前記特定対象の全部又は一部の温度情報を予め定めた高い値に設定して、前記特定対象を識別可能にする。
(もっと読む)
画像表示装置および画像表示装置用プログラム
【課題】所定の対地高度を維持可能であり地形により目標から遮蔽される飛行ルートを適切に判断可能な画像表示装置等を提供する。
【解決手段】画像表示装置1を、目標Oの周囲の地形Tの標高データを蓄積した地形データベース40と、地形データベースを用いて、目標からの見上げ角αが最大となる地点を、目標を中心とした所定の方位範囲にわたって抽出する最大見上げ角抽出手段60と、目標と見上げ角が最大となる地点とを結ぶ見通し線VLとその直下における地形との高度差である高度クリアランスを目標の周囲における異なった座標位置ごとに演算する高度差演算手段60と、高度クリアランスが所定の閾値C以下である領域を目標の周囲のマップに重畳して表示する表示装置70とを備える構成とする。
(もっと読む)
航空機が牽引されるとき航空機着陸装置を保護する方法及び着陸装置の操向可能下部に牽引棒を連結するためのピン
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
航空機において安全に低高度で飛行するための方法及び装置
【課題】航空機が安全に低高度で飛行するための方法及びデバイスを提案する。
【解決手段】本方法では、地形の安全でない起伏(R0)は、安全でない起伏(R0)上にある障害物(4’、5’)を表す少なくとも1つの高点(4、5)の位置として決定される。安全でない起伏(R0)上に配置されたボリューム底面(2)とエンベロープ(1)との間に画定される主要ボリューム(V0)は、前記安全でない起伏(R0)に追加され、これにより、少なくとも安全でない起伏(R0)及び主要ボリューム(V0)を含む上空飛行に安全な起伏(R1)が得られる。主要ボリューム底面(2)は、安全でない起伏(R0)上に置かれた閉周囲曲線(3)により画定された面積(2’)を有し、エンベロープ(1)は、高点(4、5)から、周囲曲線(3)に沿って移動する第2点(3’)まで延在する所定の長さ(L)の移動線分(S)を使って生成される。
(もっと読む)
滑走路の状態監視
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
空気の全温度測定用氷砕プローブ
本発明は、流体の少なくとも1つの物理パラメータ、特には空気の全温度、を測定する装置であって、長手方向軸(L)に沿って伸長した形状を有しており、互いに隣接して鋭角に配設されて楔形状部(7)を形成する少なくとも2つの壁を有している構体(2)であって、前記楔形状部(7)が、当該構体(2)の前記長手方向軸(L)に平行な方向に延びているという構体(2)と、前記流体の物理パラメータを測定するための少なくとも1つのセンサ要素(4)であって、前記構体(2)を貫通して形成された窓(3)の中に位置決めされているセンサ要素(4)と、を備えており、前記楔形状部(7)を形成する各々の壁(71;72)は、前記楔形状部(7)上における氷の形成を弱めるために、前記壁(71;72)に対して偏向角度を形成する少なくとも1つのノッチを含んでいることを特徴とする装置に関する。  (もっと読む)
(もっと読む)
乱気流回避操縦支援装置
【課題】航空機が飛行中に遠方の乱気流を検知した場合に、緊急回避最適経路を自動的に生成して、パイロットに報知する乱気流回避操縦支援装置を提供する。
【解決手段】航空機が飛行中に進行方向前方に乱気流等の危険領域が存在することを検出する手段と、該検出手段が危険領域を認識した場合に、その危険領域を直方体の集合で表し、半正定値計画法による初期推定解に基づいて、参照経路からの逸脱が最も少ない2次計画法を用いた回避経路の局所的最適解による飛行経路を生成する手段と、該飛行経路をパイロットに報知する手段とを備えるものとした。
(もっと読む)
ヘリコプタ制御棒用の支持組立体
【課題】容易に使用できて比較的少数の構成部品からなるヘリコプタ制御棒用の支持組立体を提供する。
【解決手段】ヘリコプタ制御棒(5)用の支持組立体(4)は、支持構造体(6)と、支持構造体(6)に固定されたインストロメントパネル(20)と、制御棒(5)を支持構造体(6)に接続する接続デバイス(30)を具備している。接続デバイス(30)は、一端(33)において制御棒(5)が取り付けられた長手方向に細長のアーム(31)を有しており、このアーム(31)が褶動して、制御棒を支持構造体(6)に向かって、或いは制御棒(5)を支持構造体(6)から離間するように移動させるとともに、アーム(31)が水平軸線(10)回りに回転して制御棒(5)の高さを調節する。
(もっと読む)
51 - 60 / 203
[ Back to top ]