
国際特許分類[B65B35/44]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 物品または材料を包装するための機械,器具,装置または方法;荷解 (11,467) | 包装される物品の繰出し,供給,整列または方向づけ (821) | グループに物品を整列したり,物品をグループで供給したりすること (437) | 無端帯またはチェーンによるもの (102)
国際特許分類[B65B35/44]に分類される特許
51 - 60 / 102
物品移載装置
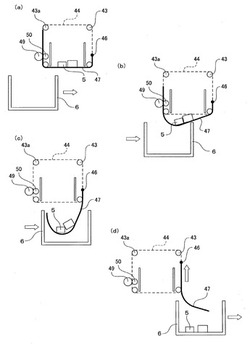
【課題】主搬送経路を連続移動している物品集品容器に対して、物品を高精度で確実にソフトに移載(投入)でき、落下時に損傷しやすい物品の移載に適した物品移載装置を提供する。
【解決手段】物品集品容器6の先端が装置本体の上流側位置へ移動されてくると、駆動ローラ49によりベルト体47の端辺部を下方へ送り出してベルト体47の中央部を物品集品容器6内に下降させ、続いて駆動ローラ49によりベルト体47の端辺部を全て送り出して物品5をベルト体47で支持しながら物品集品容器6内に下降させて物品集品容器6へ投入し、続いてチェーン駆動モータによりチェーン44を移動してベルト体47を引き抜き、下流側装置本体の側面部から、元の下流側装置本体の側面部まで周回し、駆動ローラ49によりベルト体47の端面を挟み込む構成とする。
(もっと読む)
搬送移載装置

【課題】複数の物品を迅速にしかも繰り返し確実に容器へ挿入でき、しかも複数の物品を重ねて挿入できる搬送移載装置を提供する。
【解決手段】搬送移載装置4は、多段トレー5と、搬送手段6と、吸着パッド7,8と、吸着パッド7,8の位置を相対的に接近又は離間させる変位手段と、移送手段9と、容器供給手段10とを備える。物品1,2は、互いに高さを違えるように多段トレー5に載せられる。搬送移載装置4によれば、搬送手段6が多段トレー5と共に物品1,2を搬送し、これらの物品1,2を吸着パッド7,8にそれぞれ吸着させた状態で、上記の変位手段が、吸着パッド7,8を相互に接近させることにより、物品1,2を重ね合わせた後、物品1,2を容器3に挿入できる。
(もっと読む)
整頓装置とそれに用いる供給装置と整列装置と姿勢揃え装置
【課題】 簡易な構成で、複数の対象物の姿勢を揃える姿勢揃え装置を提供しようとする。
【解決手段】
従来の姿勢揃え装置にかわって、複数の対象物を保持する保持姿勢と開放する開放姿勢との間で各々に変化させる複数の把持機器と、複数の前記把持機器を各々に支持する複数の支持機器と、複数の前記支持機器を各々に回転させる回転機器と、複数の前記把持機器に各々に対応づけられ対応づけられた前記把持機器が保持する対象物の外周形状の少なくとも一部分を各々に検知できる複数の検知センサと、を備え、前記回転機器が複数の前記把持機器を各々に回転させている間に、複数の前記検知センサが複数の対象物の前記外周形状の一部分の設定形状が特定方向に向いたことを各々に検知した時に複数の前記検知センサに各々に対応づけられた複数の前記把持機器が姿勢を前記保持姿勢から前記開放姿勢に各々に変化させる、ものとした。
(もっと読む)
穀粒の袋詰め装置
【課題】種子消毒乾燥施設及び穀粒乾燥調整施設で単一の袋詰め手段を共用する。
【解決手段】種子消毒乾燥施設(A)の種子容器搬送装置(7)により種子の収容された容器(8)を貯溜ホッパ(16a)に供給可能に構成し、また、穀粒乾燥調整施設(B)で乾燥調整された穀粒を穀粒供給手段(19)により貯溜ホッパ(16a)に供給可能に構成する。貯溜ホッパ(16a)の下端部には、容器(8)及び穀粒が通過できる開閉部と開閉手段を設け、貯溜ホッパ(16a)の下方には袋詰め手段(16)を設ける。
(もっと読む)
肉部位の真空包装方法及びその装置
【課題】豚肉は5種類の部位で成り立つが、この内の小型の2種類の部位をまとめて1種類とし、総計4種類の部位を4本のコンベヤラインで搬送して真空包装する場合の、前記小型2種類の部位の、一体化による能率低下を改善する。
【解決手段】前記小型2種類の部位を搬送する第4コンベヤラインにおいて、移送中の前後の部位の間隔を遅延検出センサーで検出し、移送中の前位の部位に対する後位の部位の遅れを、高速運搬付加手段でもって加速修正して両部位を一体化して包袋に送り込み、他の3種類の部位の包装能率に対する遅れを少なくする。
(もっと読む)
卵の移載装置
【課題】 卵を次位コンベアへ移し替える処理を安定して、かつ、高速で処理することができる卵の移載装置を提供する。
【解決手段】 搬送幅方向にそれぞれ摺動自在なN個の収容座を有する卵移送ユニット3が搬送される過程で当該卵移送ユニット3の収容座ピッチを次位コンベア20の条方向の収容座ピッチと略等しいピッチに狭める規制板4を備え、前記規制板4により次位コンベア20の条方向の収容座ピッチと略等しいピッチに狭められた前記卵移送ユニット3が前記次位コンベア20上に到来した際に、当該卵移送ユニット3を前記次位コンベア20の搬送方向と同一方向に付勢させて当該卵移送ユニット3の前記付勢方向への移動速度を前記次位コンベア20の搬送速度と実質的に同期させるとともに、当該卵移送ユニット3の収容座に収容している卵Eを次位コンベア20の収容座に一括放出させる加速兼放出手段5を備えた。
(もっと読む)
集積装置
【課題】 コンパクトで高速処理が可能であり、高密度に安定して包装物を集積できる集積装置を提供する。
【解決手段】 搬送機構3による包装物1の搬送方向に沿った複数箇所に定ピッチPでプッシャー4a〜4jを配置する。このプッシャー4a〜4jは、エアシリンダ51で搬送面34に対して突出・退入可能とし、かつ水平駆動機構52で搬送方向に同期移動可能に構成する。搬送面上に平置きされた包装物1をプッシャー4a〜4jで押し上げて傾斜姿勢に変換した後、プッシャーを搬送方向に同期移動させて前記ピッチPを縮小し、包装物1を集積する。
(もっと読む)
移送路に沿うパッケージのグループ分けユニット
移送路(T)に沿ってパッケージ(2)をグループ分けするユニット(1)であって、パッケージ2を受取るために移送路(T)に平行な複数の長手方向ラインとして配列された受取りステーション(5)と、それぞれの長手方向ラインからの、移送路(T)を横断する少なくとも1列に整列された所定個数のパッケージ(2)で成るグループ(3)の取出しステーション(6)と、各グループ(3)の個数に等しい個数のパッケージ(2)を所定の時間間隔で供給され、パッケージ(2)を移送路(T)に沿って送る移動コンベヤ面(9)と、移送路(T)に平行な作用部分(R1)を有する第1の移動路(R)に沿って周回移動する少なくとも1つの整列部材(45)と、受移送路(T)に平行な作用部分(S1)を有する第2の移動路(S)に沿って周回移動する少なくとも1つの押し部材(50)とを含み、整列部材(45)および押し部材(50)が独立した第1および第2のコンベヤ手段(48,53)によりそれぞれ移動され、第1および第2の移動路(R,S)の作用部分(R1,S1)が互いに一致しているユニット(1)が記載される。 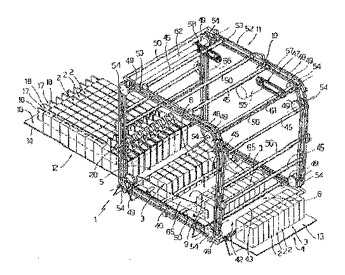 (もっと読む)
(もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
箱詰装置
【課題】 本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】 個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記一群の袋について、前記厚み検出手段より検出される前記各個別の袋の厚みを加算し、または前記厚み検出手段より検出される前記各個別の袋の厚みを所定値から減算する演算手段と、を備えることを特徴とする。
(もっと読む)
51 - 60 / 102
[ Back to top ]