
国際特許分類[B65G1/04]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 倉庫またはマガジン内における,物品の個々にまたは秩序だった貯蔵 (4,068) | 貯蔵装置 (3,167) | 機械的なもの (2,886)
国際特許分類[B65G1/04]の下位に属する分類
あらかじめ定められた位置または高さで取り出すために物品を供給するための手段をもつもの (133)
物品の挿入または取出しを容易にするための相対的に可動なラックをもつもの (97)
物品の挿入または取出しを容易にするための一つの閉回路中で動き得る物品の支持機または保持機をもつもの (72)
取出す物品を選択するための装置または自動制御手段をもつもの (1,643)
国際特許分類[B65G1/04]に分類される特許
21 - 30 / 941
物品保管設備
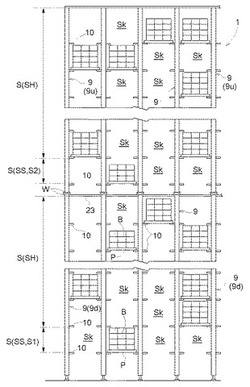
【課題】パレットとして、設定上限重量で物品を積み付けて収納部に収納した際の下方側の撓み量が許容限度内となるパレットと、許容限度を超えるパレットとを使用しながらも、保管棚の収納効率の低下を抑制することができる物品保管設備を提供する。
【解決手段】収納部Sとして、下方側への撓み量が許容限度内のパレットPを収納するための標準収納部SHと、下方側への撓み量が許容限度を超えるパレットPを収納するための補助収納部SSとが設けられ、制御手段が、撓み量が許容限度内のパレットPを収納することが指令された場合には、標準収納部SHにパレットPを収納し、かつ、下方側への撓み量が許容限度を超えるパレットPを収納することが指令された場合には、補助収納部SSにパレットPを収納するように構成されている。
(もっと読む)
物品収納設備

【課題】構成の簡素化を図りながら、移動通路において複数台の物品搬送体を効率よく移動させて、搬送能力の向上を図る。
【解決手段】物品搬送体3として、昇降案内体11を移動通路2の横幅方向の一方側に位置させる第1物品搬送体3aと横幅方向の他方側に位置させる第2物品搬送体3bとが備えられ、第1物品搬送体3a及び第2物品搬送体3bの夫々に備える昇降体10が、収納部との間で物品Bを授受する物品授受姿勢にて昇降案内体11に支持される状態で、且つ、その支持状態において、相手側の物品搬送体3の昇降体10と移動通路2の横幅方向に重複する部分を備えかつ相手側の物品搬送体3の昇降案内体11に接当しない範囲で相手側の物品搬送体3側に突出された状態で設けられ、第1物品搬送体3a及び第2物品搬送体3bの夫々に備える走行移動体12が、すれ違い移動できるように構成されている。
(もっと読む)
物品搬送設備
【課題】物品の搬送に長い時間を要している場合にその原因となるサイクルを判別することができ、物品の搬送効率の改善を図ることができる物品搬送設備を提供する。
【解決手段】作業指令手段からの作業指令情報に基づいて上位コントローラが搬送要求を作成したときから搬送管理手段が搬送制御手段に搬送指令情報を送信するまでの時間を計時して送信前経過時間として、その送信前経過時間を対応する搬送指令情報と関連付けて記憶する時間管理手段と、時間管理手段に記憶されている送信前経過時間を搬送指令情報に対応する形態で表示手段に表示する表示制御手段とを設ける。
(もっと読む)
自動倉庫システム
【課題】 省スペース化した自動倉庫システムを提供することを目的とする。
【解決手段】 自動倉庫システム(20)は、垂直に伸びる複数の支柱(103)と水平に伸びる複数の梁(105)とによって組み上げられた複数の保管エリア(RC)に荷物(BG)を格納し、複数の保管エリアに荷物を搬入し且つ複数の保管エリアから荷物を搬出する。そして自動倉庫システムは、支柱に配置された縦ガイドレール(110)と、梁に配置された横ガイドレール(110)と、少なくとも1つの保管エリアと同じ矩形状の縦枠及び横枠を有する枠体(51)と、縦枠に配置され縦ガイドレール又は横枠に配置され横ガイドレールと係合するガイドローラ(52)とを有する移動台車(50)と、を備える。
(もっと読む)
物品収納設備
【課題】物品収納棚の収納効率を低下させることなく入出庫搬送装置の搬送処理の簡素化を図ることができる物品収納設備を提供する。
【解決手段】第1受渡箇所27aに物品Wが存在しない場合は外部から搬入された物品Wを第1受渡箇所27aまで搬送し、第1受渡箇所27aに物品Wが存在する場合は外部から搬入された物品Wを第2受渡箇所27bまで搬送し、第2受渡箇所27bに位置する物品Wを収納部1の奥側収納箇所1bに搬送した後、第1受渡箇所27aに位置する物品Wを収納部1の手前側収納箇所1aに入庫する。
(もっと読む)
物品移載装置
【課題】把持する物品に過大な把持力が作用することを防止して、長期にわたり精度よく物品を把持可能な物品移載装置を提供する。
【解決手段】略水平方向に移動可能に立設されたマストと、マストに沿って昇降可能に支持された昇降台6と、昇降台6を昇降させる昇降装置と、昇降台6に設けられ、並設する格納庫のラックとの対向方向に伸縮自在で、且つ対向方向に直交する水平方向に移動して物品Wを把持する一対のフォーク10とを備える物品移載装置において、一対のフォーク10を水平移動させるための第1電動機11dの電流値を制御して、物品Wを把持する把持力を制御する制御手段14が設けられている。
(もっと読む)
アライメント調整装置、ライブラリ装置及びアライメント調整方法
【課題】 カートリッジ等の被搬送物を搬送するロボットのアライメント調整を自動化し、安定したハンドリングを可能にすることにある。
【解決手段】 アライメント調整装置、ライブラリ装置又はアライメント調整方法であって、収納棚(10)に被搬送物(カートリッジ4)を搬入し、又は収納棚から被搬送物を搬出する少なくとも2つのロボット(6、8)を備え、ロボットの1つでセルアクセスの異常が発生した場合に基準フラグ(18A、18B、18C)の測定前に、アクセスの異常時のロボットから別のロボットに切り替えてアクセスを行い、複数のロボットにセルアクセスの異常が発生した場合、対象セルフラグ(19)を測定する。また、複数のロボットにエラーが発生する場合、セル側の経年変化を判断し、対象セルフラグの再測定を行う。
(もっと読む)
機械式駐車場
【課題】本発明はパレット方式の機械式駐車場に関し、リフトから異なる4方向に対してパレットの移載を可能とすると共に車両の入出庫方向の自由度を高めることを課題とする。
【解決手段】車両70が積載されるパレット19と、パレット19と共に車両70が駐車される駐車層12と、パレット19が搭載されるリフトフレーム20と、リフトフレーム20を昇降駆動する昇降装置22とを有するリフト11と、パレット19を駐車層12に移載するパレット移載装置21とを有し、前記パレット移載装置21をリフト11に設け、パレット19をリフト11と駐車層12との間で直交する四方向に移載しうる構成とする。また昇降装置22に、リフトフレーム20を昇降可能に支持する複数のマストよりなるリフトハウジング36と、リフトハウジング36の一側部に配設されたカウンタウエイト30,31とを設ける。
(もっと読む)
物品搬送設備
【課題】物品保管部の設置箇所に制限を受けることなく、物品保管部の構成の簡素化を図り、入庫作業と出庫作業とを連続して行う場合にその作業にかかる時間の短縮化を図る。
【解決手段】第1授受位置J1と物品保管部6の内部との間で物品3を搬送する第1搬送コンベヤ37と、第2授受位置J2と物品保管部6の内部との間で物品3を搬送する第2搬送コンベヤ38とが備えられ、物品搬送車2は、走行レール1の経路上の授受用停止位置に停止した状態で、把持部4の昇降を行って第1授受位置J1及び第2授受位置J2の一方との間で物品3を移載自在であり、且つ、授受用停止位置に停止した状態で、把持部4のスライド移動を行って第1授受位置J1及び第2授受位置J2の他方との間で物品3を移載自在に構成され、第1搬送コンベヤ37と第2搬送コンベヤ38の一方が入庫部7として構成され、他方が出庫部8として構成されている。
(もっと読む)
物品収納設備
【課題】一対のスタッカークレーンの移動経路幅を極力狭くして設備のコンパクト化を図り、構成の複雑化を極力抑え、なおかつ、物品処理能力を効果的に向上させることができる物品収納設備を提供すること。
【解決手段】制御手段が、一対の昇降体(UD)を、一対のスタッカークレーン(3a、3b)が干渉することなくすれ違い移動できる離間距離として設定される必要離間距離以上昇降方向で離間したすれ違い用昇降位置に昇降させるべく、一対の昇降体の双方を、物品搬送作動による昇降作動とは異なる干渉回避用の昇降作動にて昇降させる相互回避昇降処理を行なうように構成されている物品収納設備。
(もっと読む)
21 - 30 / 941
[ Back to top ]