
国際特許分類[B65G47/31]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | コンベヤによって移送中物品の相対的位置または姿勢を変える装置 (851) | 物品を整列させるもの,例.個々の物品間の間隔を変えるもの (568) | 一連のコンベヤによる移送中に行うもの (328) | 一連のコンベヤの相対速度を変えることによって行うもの (86)
国際特許分類[B65G47/31]に分類される特許
1 - 10 / 86
容器搬送装置
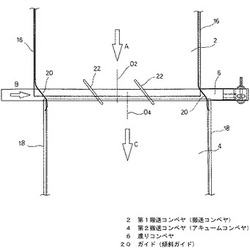
【課題】搬送コンベヤ2からアキュームコンベヤ4へ受け渡す容器8が後続容器8の押圧力によって傷付くことを防止する。
【解決手段】容器処理装置内に配置された幅の広い搬送コンベヤ2と、この搬送コンベヤ2の下流側に直列に配置された幅の広いアキュームコンベヤ4と、これら両コンベヤ2、4の間に配置され、両コンベヤ2、4と直交する方向に搬送する渡りコンベヤ6とを有している。アキュームコンベヤ4を搬送コンベヤ2に対して、渡りコンベヤ6の搬送方向へ向けてずらして配置し、かつ、両コンベヤ2、4の、渡りコンベヤ6の下流側の側部をつなぐ傾斜ガイド20を配置した。
(もっと読む)
物品の搬送装置及び搬送方法

【課題】第一回転円盤と第二回転円盤との同期機構や吸引切換え機構が不要で構成簡素であり、各回転円盤を連続回転させても物品の移替えを安定確実に行うことができ、搬送能力を大幅に向上させ得る物品の搬送装置と搬送方法を提供する。
【解決手段】物品Wを外周部に吸着保持して回転する第一回転円盤1及び第二回転円盤2を備え、各外周部の一部同士を近接させた物品受渡し部Tで第一回転円盤1の外周部に吸着保持された物品Wを第二回転円盤2の外周部へ移し替えて搬送する物品の搬送装置10において、第一回転円盤1及び第二回転円盤2の各外周部に全周に亘って吸引隙間11、21を形成し、各吸引隙間11、21を通して外気を常時吸引して物品Wを吸着保持可能に構成し、第二回転円盤2の吸着力を第一回転円盤1の吸着力よりも大きくした。
(もっと読む)
容器集合装置
【課題】搬入コンベヤと搬出コンベヤの間で、並置した複数列コンベヤとそれを横断して容器を接触摺動させる容器ガイドによって、容器を複数列から単列化集合する容器集合装置において、スペース効率がよく、効率よく単列化集合できる容器集合装置。
【解決手段】搬入コンベヤ5側から搬出コンベヤ6側へ順次速度差を有する複数列のカーブコンベヤ1a、1b、1c、1dを搬入コンベヤ5と搬出コンベヤ6との間に隣接して並設し、複数列のカーブコンベヤにカーブ部の接線方向と適宜の角度をなして複数列のカーブコンベヤをほぼ横切って容器Pを接触摺動によりガイドするカーブガイド1gを設けて、複数列で搬入されてくる容器Pを単列化集合するように構成した。
(もっと読む)
容器供給装置
【課題】上流の搬送コンベヤからその入口コンベヤを経由して前記容器処理機器へ容器を供給する容器供給装置において、入口コンベヤ上で容器処理機器に供給されつつある容器の密着量を所定量に維持しつつも、密着容器に変形或いは損傷を与えない。
【解決手段】上流の搬送コンベヤ7からその入口コンベヤ6を経由して容器処理機器5へ容器Bを供給する容器供給装置である。入口コンベヤ6上で容器処理機器5に供給されつつある容器B相互間の密着量を検知できる容器センサ9が設けられている。制御装置10は、容器センサ9によって検知した容器密着量に応じて搬送コンベヤ7の搬送速度(容器供給量)を制御する。
(もっと読む)
容器搬送装置
【課題】多数のボトルを隙間なく一列縦隊にして搬送する際、先頭のボトルに過大な押圧力が掛るのを抑制する。
【解決手段】ラベル装着装置2には複数のコンベアCV1,CV2,…を一列に配置して多数のボトルBをラベル装着装置2に供給するラベル搬送装置3が設けられる。制御部31は、スクリュー310が設けられたコンベアCV1の搬送速度をラベル装着装置2における容器処理速度Wに基づく搬送速度v1に制御し、コンベアCV1の上流側に連結されたコンベアCV2の搬送速度を容器処理速度Wに基づく、搬送速度v1よりも低速の搬送速度v2に制御する。v2<v1とすることによりコンベアCV1のオーバーラップ部OLP1でボトル間に隙間が生じるようにする。
(もっと読む)
コンベヤ設備
【課題】本発明は、物品の搬送能力を高く保ち、仕分けをおこなえる間隔を確保できるコンベヤ設備を提供することを目的とする。
【解決手段】コンベヤ設備10は、物品12の搬送経路に沿って搬入用コンベヤ14、加速用コンベヤ16、搬出用コンベヤ18が並べられている。コンベヤ設備10は、物品12の大きさおよび間隔を測定する測定装置20、加速用コンベヤ16における物品12の位置を検出する検出装置22、および加速用コンベヤ16を制御する制御装置を備える。
(もっと読む)
円柱形物体の搬送装置
【課題】円柱形物体1を,その軸線1bの回りに回転しながら搬送する搬送装置において,その装置の小型化等を図る。
【解決手段】平行に延びるように配設した少なくとも二本の搬送コンベア4,5を備え,この各搬送コンベア4,5を,同じ方向に速度を変えて駆動することにより,前記円柱形物体1を,その軸線1bの回りに回転しながら搬送する。
(もっと読む)
コンベヤ装置
【課題】駆動速度の異なる2列のコンベヤ83,85に受け皿11を跨らせて横回転させながら搬送することによって、前記受け皿11の搬送姿勢を揃えるコンベヤ装置80において、姿勢揃え時の脱落の衝撃で、前記受け皿11上の農産物Aが落下するのを防止できるようにする。
【解決手段】前記受け皿11が跨って載るように並列状に配置された2列のコンベヤ83,85群は、搬送面の高さ位置が高い方である高位置コンベヤ83と、低い方である低位置コンベヤ85とからなる。前記各コンベヤ83,85の駆動速度には前記各搬送面の高低差に対応した速度差を持たせる。前記受け皿11の外周下部に形成された段差部20が前記高位置コンベヤ83における前記低位置コンベヤ85寄りの角部83aに被さって嵌ることによって、前記受け皿11の一方向回転を停止させる。
(もっと読む)
基板搬送装置
【課題】基板の搬送方向の曲がりを搬送しながら補正する基板搬送装置を提供する。
【解決手段】コロによって基板を搬送する基板搬送装置であって、載置された基板を搬送し、基準速度で回転するコロと、基準速度に対して加減速された速度で回転するコロで構成される複数の搬送コロと、前記搬送コロを備えた複数のコロ軸と、前記コロ軸を回転駆動させる駆動用モータと、搬送中の基板の曲がりを検知するセンサーと、前記センサーからの出力信号によって基板の曲がり度合いを検出する基板曲がり検出装置と、前記基板曲がり検出装置からの出力信号を得て、前記搬送コロの内、基準速度に対して加減速された速度で回転するコロの回転速度を調整するための調整用モータを制御する制御装置と、前記調整用モータの回転によってコロの回転速度を加減速させる差動装置を備え、基板の搬送中の曲がりを補正することを特徴とする基板搬送装置。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
1 - 10 / 86
[ Back to top ]