
国際特許分類[G01B5/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 機械的手段の使用によって特徴づけられた測定装置 (1,646)
国際特許分類[G01B5/00]の下位に属する分類
点の座標測定用 (262)
長さ,幅または厚測定用 (213)
直径測定用 (109)
離隔対象物または離隔開口間の距離または間隙測定用 (69)
深さ測定用 (27)
輪郭または曲率測定用 (357)
角度またはテーパ測定用;軸の心合せ試験用 (93)
面積測定用,例.プラニメータ (3)
表面の粗さまたは不規則性測定用 (72)
固体の変形測定用,例.機械的ひずみ計 (59)
国際特許分類[G01B5/00]に分類される特許
331 - 340 / 382
プローブのアプローチ方向設定方法、形状測定装置プログラム及び記憶媒体
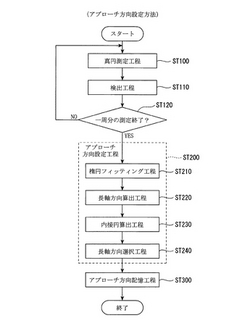
【課題】 プローブ軸部の一端から突出する接触部を有するプローブのアプローチ方向を正確に設定できるプローブのアプローチ方向設定方法を提供する。
【解決手段】 プローブ軸部から突出する接触部を有するプローブを用いて被測定物表面を測定するにあたり、接触部が被測定物表面の測定点に当接する方向であるアプローチ方向を設定する。接触部の向きを固定した状態でプローブ軸部の一端または接触部を真円の輪郭に複数点で当接させながら真円の一周分にわたって前記プローブを移動させる(真円測定工程ST100)。プローブ軸部の一端または接触部が真円の輪郭に当接した際のプローブ軸部の位置をプローブ軸部に直交する面内で検出する(検出工程ST110)。検出工程にて検出された検出データと真円とのずれに基づいてアプローチ方向を設定する(アプローチ方向設定工程ST200)。
(もっと読む)
ワークピース搬送メカニズムのためのゲージ・グリッパ組立体
ワークピースの特性を直接的に測定するゲージ・グリッパ組立体である。組立体は、ロボットアームのような搬送メカニズムに取り付けられるために適応されており、グリッパおよびゲージを有するヘッドを含む。グリッパは把手部またはその他の手段を使用してワークピースを持ち上げ、保持するために適応されており、ゲージは、ワークピースがグリッパによって保持されている間に、ワークピースの特性を直接的に測定するために適応されている。  (もっと読む)
(もっと読む)
プローブ

【課題】信号を伝送するプローブの構成の簡素化を図ること。
【解決手段】機械工具のための測定プローブ(1)は、窓(6)を含むハウジング(4/5)を有し、窓(6)は、赤外線の各送信器(12)または各受信器(13)からの/への信号の光学的な送信または受信を許容する。送信器および受信器のコンポーネントをハウジングの外側表面に設置する必要をなくすために、それらは回路基板(8′)に表面実装される。
(もっと読む)
プローブの較正
プローブ(62)を較正する方法であって、前記プローブが、機械(50)上に取り付けられ、ワークピース接触先端(66)を有するスタイラス(64)を有し、プローブの第1の向きについて、プローブに関する較正情報を計算すること、およびプローブが第1の向きに対してある角度だけ配向されたときについてプローブ較正情報を得るために、較正情報をその角度だけ回転させることを含む方法が開示される。また、測定工程中にプローブを較正する方法が開示される。構成情報は、プローブヘッド軸を機械軸に関係付けるベクトル、較正マトリクス、基準データ、および慣性マトリクスを含む。スタイラス先端(66)は、プローブの向きで基準設定することも、様々な向きで得られる基準情報から推論することもできる。回転させるステップは、機械用のコントローラ上で記憶することができるソフトウェア/コンピュータプログラムによって実施することができる。  (もっと読む)
(もっと読む)
位置測定方法
【課題】簡単かつ正確に被測定面の位置を測定可能な位置測定装置を提供する。
【解決手段】被測定面上に測定点P1〜P4を4つ以上設定し、フランジ面14a内に各測定点P1〜P4を頂点とした第1〜第4の仮想三角形X1〜X4を複数形成するとともに、各仮想三角形X1〜X4を含むフランジ面14aの位置を三点測量方法により算出する。これにより、測定作業が簡単でかつ、測定点P1〜P4が3つの場合に比べてフランジ面14aの位置を正確に測定することができる。
(もっと読む)
フランジウエー測定定規
【課題】 本体との直角と水平を確認しながら、本体の基準面と対象物の被測定面との間の距離を、手早く簡単に且つ正確に測定することができるように工夫したフランジウエー測定定規を提供する。
【解決手段】 主尺10をスライド自在に取付けた基板1の左右両側にアーム3,3を水平に突出する。アーム3,3には押え面4’を基板1の底面に対して直角に設けた定規押え体4を取付ける。本体としてのレールRAの上面RSに基板1を載置し、且つ、定規押え体4の押え面4’をレールRAの基準面RSに押接した状態で、主尺10を先端面12’が対象物としてのガイドレールGRの被測定面GSに当たるまでスライドさせて、間隔を測定する。
(もっと読む)
複数の関節軸を有する多関節式アーム付き三次元測定器具
本発明は、複数の軸回転ピンを包含する多関節式アームを備える三次元測定器具に関していて、前記軸回転ピンの各々を中心とする回転角度を個別に測定するために、前記アームに内蔵される角度コーダを備える。本発明は、器具(1)のアーム(4;5)の少なくとも1つが、二つのアーム部分の間に挿入される中空管(4.11;5.11)を包含し、前記中空管がその端部の各々で、突合せ接合する端部の相互の締付けとは無関係に、精確で安定し繰返されるアームの軸線上の芯合せを保証するために、隣接するアーム部分の端部の突合せ接合の形態と適合する突合せ接合の形態を有し、前記中空管と前記アーム部分との間の結合が、器具全体を再較正すること無く、中空管を長さの異なる別の中空管と現場で交換することが可能である着脱可能な締付け手段(10)によって、前記突合せ接合する端部に備えられることを特徴とする。  (もっと読む)
(もっと読む)
測定機の回転精度補正方法および測定機
【課題】位相差法の欠点を解消でき、かつ、既存の装置を改良することなく信頼性の高い測定データが得られる測定機の回転精度補正方法を提供する。
【解決手段】回転機構(回転テーブル3)を有する測定機1の回転精度補正方法であって、測定機の回転機構を使って予めデータ採取位置14の形状データが値付けされたマスターワークMWを回転させながら、そのマスターワークのデータ採取位置の形状を検出器7によって測定し、そのマスターワーク測定データから前記値付けされた形状データを差し引いて回転機構の回転精度データを求める回転精度データ算出工程と、前記測定機の回転機構を使ってワークを回転させながら、そのワークの形状を検出器によって測定し、そのワーク測定データを求めるワーク測定データ算出工程と、前記ワーク測定データから前記回転精度データを差し引いてワークの真値データを求めるワーク形状演算工程とを備える。
(もっと読む)
寸法測定システム、寸法測定装置及びマスタ
【課題】 マスタを間違えた誤った校正処理を防止できる寸法測定システムの実現。
【解決手段】 寸法測定装置10と、所定の寸法値の部分を有する複数のマスタ50A,50Bとを備え、所定の寸法値の部分を測定して寸法測定装置を校正する寸法測定システムであって、各マスタは、寸法測定装置がマスタの所定の寸法値の部分を測定する状態にあることを検出する測定状態検出手段55と、寸法測定装置が所定の寸法値の部分を測定する状態にあることを検出したことを示す測定状態信号を送信する無線通信手段とを備え、寸法測定装置は、測定状態信号を受信する無線通信手段37を備え、無線通信手段が測定状態信号を受信している時に校正処理を行う。
(もっと読む)
機械式リフト測定システム
リフト作業中に荷の位置を判断するためのリフト測定システムを提供する。該システムは計測器を備えた表示部と該計測器に対して動く可動インジケータを備えている。リンク装置は荷及び計測器と連通しており、荷の動きは前記計測器に対応する前記インジケータの動きに変換され荷の位置を表示する。複数の表示部及びリンク装置は種々の荷の支持域に設置することができ、対応するインジケータの相対的位置は荷の傾きに関する情報を提供できる。  (もっと読む)
(もっと読む)
331 - 340 / 382
[ Back to top ]