
国際特許分類[G01B7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 電気的または磁気的手段の使用によって特徴づけられた測定装置 (2,440)
国際特許分類[G01B7/00]の下位に属する分類
点の座標測定用 (9)
長さ,幅または厚みの測定用 (209)
直径測定用 (18)
離隔対象物または離隔開口間の距離または間隙測定用 (63)
固体の変形測定用,例.抵抗ひずみ計によるもの (233)
深さ測定用 (14)
輪郭または曲率測定用 (117)
角度またはテーパ測定用;軸の心合せ試験用 (729)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (45)
国際特許分類[G01B7/00]に分類される特許
151 - 160 / 998
位置センサ及び位置検出方法

【課題】ホール素子用磁石と外部磁力源が併存している場合に、外部磁力源の磁力の影響を除去して位置検出の誤差を少なくする。
【解決手段】VCMに適用される位置センサは、コイル部14に取り付けられたホール素子用磁石9と、磁気回路部11のホール素子用磁石9に対面する位置に取り付けられたホール素子1〜nと、磁気回路部11のホール素子1〜nに対してコイル部14の中心軸Lから等距離になる対称位置に取り付けられたホール素子1’〜n’とを有する。ホール素子用磁石9の位置P’は、ホール素子1〜nの出力電圧V1〜Vn、ホール素子1’〜n’の出力電圧をV’1〜V’nとすると、P’=F(V1−V’1,V2−V’2,・・・,Vn−V’n)より求まる。
(もっと読む)
ワイヤーロープの径測定装置

【課題】移動するワイヤーロープに対して径の測定ができ、ワイヤーロープへの取り付けが容易なワイヤーロープの径測定装置を提供する。
【解決手段】ワイヤーロープ11が隙間を有して挿通される貫通孔12が形成された枠体部材13と、貫通孔12の周囲に3個以上のセンサ部14〜17が間隔をあけて設けられ、センサ部14〜17部で貫通孔12を挿通するワイヤーロープ11までのそれぞれの距離を検知する距離検出手段18と、距離検出手段18からの信号を基に、ワイヤーロープ11の直径を演算する制御部19とを有し、枠体部材13は、貫通孔12を中心に少なくとも2つに分割可能である。
(もっと読む)
移動検出装置
【課題】 伝達軸の移動動作に追従して移動部材が移動し、移動部材の位置が検知部で検知される移動検出装置において、移動部材ががたつくことなくスムースに移動できるようにする。
【解決手段】 伝達軸12で移動させられる移動部材13がばね部材14で前方へ付勢されている。移動部材13の下には検知基板21が設けられ、移動部材13の下部に弾性摺動子28aが設けられている。板ばね30は一対の付勢機能部32,32を有し、それぞれの付勢機能部32に、押圧板部33、摺動板部34、中間板部35および第1の湾曲部36と第2の湾曲部37が一体に形成されている。この付勢機能部32,32により、移動部材13が下向きに均一に押圧され、安定した姿勢で移動できるようになる。
(もっと読む)
センサユニットおよびこれを用いた位置決め装置
【課題】安価かつコンパクトな構成で、ターゲット位置についてギャップセンサの側長域を超える大きな変位を測定できるセンサユニットおよびこれを用いた位置決め装置を提供する。
【解決手段】検出された物理量からターゲット110の位置を計測するセンサユニット100であって、可動方向aおよびこれに垂直な方向bに対して傾きを有する傾斜面116が形成されたターゲット110と、傾斜面116との距離に対応する物理量を検出するギャップセンサ120とを備える。これにより、ターゲット110の可動方向への変位に対して傾斜面116のギャップセンサ120に対する変位は小さくなるため、安価かつコンパクトな構成で、ターゲット位置についてギャップセンサ120の側長域を超える大きな変位を測定できる。
(もっと読む)
位置検出機構
【課題】本発明は、位置検出機構の検出可能な範囲を拡大するということを目的とするものである。
【解決手段】本発明の位置検出機構は、Y軸に垂直な方向の断面における磁化方向が断面位置に寄らず一定であり、X軸方向の対向する端面における磁力線の方向が互いに反対方向である磁石15と、磁石15とZ軸方向で間隔を空けて配置され、XY平面に平行な方向の磁界を感知することができるGMR素子13とを備え、磁石15は、GMR素子13に対して相対的にX軸方向およびY軸方向に移動可能であり、磁石15のX軸方向、Y軸方向およびZ軸方向の外形はY軸方向がもっとも長く、GMR素子13は、磁石15がY軸方向にΔY移動した際の磁石15からの磁束密度の変化ΔBが±5%以内となる位置に位置し、GMR素子13は、磁石15をZ軸方向に投影した領域の外部に位置している。
(もっと読む)
変位計用アンプ装置
【課題】 差動トランス式変位計と歪みゲージ式変位計のいずれを使用する場合であっても、共通して使用することが可能な変位計用アンプ装置を提供する。
【解決手段】 変位計が差動トランス式変位計であるか歪みゲージ式変位計であるかの種別を記憶した不揮発性記憶素子と、変位計の種別に基づいて変位計から受信した出力信号に対するゲインの値を変更する計装アンプ55と、変位計の種別に基づいて変位計から受信した出力信号に対する検波の方法を変更する相関係数計算部58と、変位計の種別に基づいて変位計に送信する電源電圧の波形を変更する波形メモリ53および波形制御部54とを備える。
(もっと読む)
磁気センサユニット
【課題】回路規模の増加を伴うことなく中心位置の検出精度の向上を図り、結果的に位置検出精度を向上させる。
【解決手段】センサ出力Vhr、Vhlの差信号を演算する減算部16及びセンサ出力Vhr、Vhlの和信号を演算する加算部17の上流に設けた、センサ出力Vhr、VhlをV/I変換するV/I変換部13a、13bを所定周期で切り替え、結果的にセンサ出力VhrをV/I変換部13a、センサ出力VhrをV/I変換部13bで処理したときの差信号及び和信号の除算値と、センサ出力VhrをV/I変換部13b、センサ出力VhrをV/I変換部13aで処理したときの差信号及び和信号の除算値との平均値を、位置検出信号として出力する構成とする。これによりV/I変換部13a、13bでのオフセット成分を低減し位置検出信号に含まれるオフセット成分を低減して精度向上を図る。
(もっと読む)
操作位置検出装置
【課題】検出対象である操作位置の数よりも少ない個数の磁気センサで操作位置を判別し、また、磁気センサの1つが故障しても各操作位置の検出に支障がなく、さらに、ユーザに良好な操作感を付与することができる操作位置検出装置を提供する。
【解決手段】シフトポジション検出装置1は、シフトレバー22に配置された磁石10と、磁気センサとしての第1〜第4のMRセンサ11〜14と、判別部としての制御部15と、を備えて概略構成され、第1〜第4のMRセンサ11〜14の出力の判定結果とポジションを対応させたシフトポジション情報160に基づいて各ポジションを判別する。
(もっと読む)
車両の位置を決定するシステム、このシステムを備えた車両及びその方法
車両の位置を決定するシステムは、磁石の磁界強度を測定する複数のセンサと、複数のセンサに対する磁石の位置を決定する演算手段とからなり、複数のセンサは2次元アレイで配置されている。 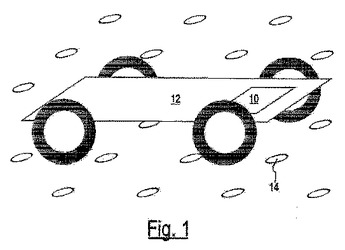 (もっと読む)
(もっと読む)
弦楽器用抵抗型弦高測定器
【課題】弦楽器の弦高を精度よく測定し数値化する。
【解決手段】被測定弦楽器に電気伝導体の計測弦を張り、絶縁体で作った楔形測定子の上部斜面に膜状で且つ一様な抵抗体を張り、抵抗体の両端に電圧を掛けながら測定したい楽器ネック部の弦に接触するまで挿入する。
抵抗体と計測弦が接触した時の計測弦の電圧を計測する事によって、楔測定子のどの位置に計測弦が接したかを知り、楽器のネックと弦の距離である弦高を測定する。
(もっと読む)
151 - 160 / 998
[ Back to top ]