
国際特許分類[G01B7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 電気的または磁気的手段の使用によって特徴づけられた測定装置 (2,440)
国際特許分類[G01B7/00]の下位に属する分類
点の座標測定用 (9)
長さ,幅または厚みの測定用 (209)
直径測定用 (18)
離隔対象物または離隔開口間の距離または間隙測定用 (63)
固体の変形測定用,例.抵抗ひずみ計によるもの (233)
深さ測定用 (14)
輪郭または曲率測定用 (117)
角度またはテーパ測定用;軸の心合せ試験用 (729)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (45)
国際特許分類[G01B7/00]に分類される特許
121 - 130 / 998
複数の検出機能を有する静電容量検出回路
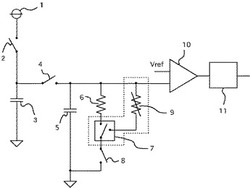
【課題】 回路規模が大きくなったり、またコストが高くなったりすることなく、センサに触れた際の接触座標の検出に加えて同時に押下の強弱等の他の検出が可能な、すなわち複数の検出機能を有する静電容量検出回路を提供することを目的とする。
【解決手段】 指や掌の接触による容量変化を検出する静電容量検出回路であって、さらに当該回路の放電経路中に放電用抵抗と機能切り替えスイッチにて切り替え可能で、かつ指や掌の押下強度により抵抗値が変化する圧力センサを付加することにより、接触座標の検出と押下圧を同時に検出できる機能を具備する複数の検出機能を有する静電容量検出回路。
(もっと読む)
チェンジレバーの位置検出装置および自動変速機の変速制御装置

【課題】ホール素子を用いてチェンジレバーのセレクト方向の位置およびシフト方向の位置を検出しつつ、チェンジレバーユニット内でシフトパターンの判定を行わない。
【解決手段】ホール素子素子2はチェンジレバーのセレクト方向の位置に応じたセレクト位置電圧信号およびシフト方向の位置に応じたシフト位置電圧信号を出力する。TCU4の判定部5は、ホール素子からのセレクト位置電圧信号およびシフト位置電圧信号に基づいてマップ6aに設定されたセレクト位置電圧信号の領域および電気的シフト位置電圧信号の領域からチェンジレバーの位置を判定する。そして、TCU4の変速制御信号出力部7は、判定部5からのチェンジレバーの位置に基づいて自動変速機3の変速制御信号を出力する。
(もっと読む)
接触検出装置および接触検出装置を適用したロボットシステム
【課題】ノイズに強く、アプリケーションに応じて接触検出器の数の増減が容易で、接触位置も特定可能な接触検出装置を提供する。
【解決手段】 2接点スイッチと抵抗値のそれぞれ異なる抵抗器から構成される複数の接触検出器を、リファレンス電源線、アース線および信号線からなる接続ケーブルで信号処理部に接続する。信号線には接触有無と接触時のその位置を表す信号が検出され、この信号から信号処理部で接触状態と接触位置を判別し検出する。また、この接触検出装置をロボットの腕、胴、頭など各部位に装着しその接触状態を検出する。
(もっと読む)
超音波探傷システムおよび超音波探傷方法
【課題】検査対象の所定範囲を効率よく網羅的に検査する。
【解決手段】検査対象Aの表面上において移動させられて検査対象A内部の超音波探傷を行う超音波探触子2と、該超音波探触子2の位置および姿勢を検出する位置姿勢検出装置3と、検査対象Aの表面上における超音波探触子2の移動経路Cを記憶する経路記憶部と、経路記憶部に記憶されている移動経路Cに対する超音波探触子2の位置および姿勢のズレ量の許容値を記憶する許容値記憶部と、位置姿勢検出装置3により検出された超音波探触子2の位置および姿勢の移動経路Cに対するズレ量が許容値記憶部に記憶されている許容値を超えた場合にその旨を報知する報知部6とを備える超音波探傷システム1を提供する。
(もっと読む)
センサ装置および情報表示装置
【課題】検出可能距離および検出感度を向上させることができるセンサ装置および情報表示装置を提供する。
【解決手段】上記センサ装置は、センサ部10と、演算部12と、切替回路部11と、制御部13とを具備する。センサ部10は、検出対象物の近接によって静電容量が変化する複数の検出電極を有する。演算部12は、検出対象物とセンサ部との間の距離である第1の距離を算出する。切替回路部11は、複数の検出電極を、上記静電容量の検出のための信号電圧が供給される第1の状態と電気的に浮遊した第2の状態との間で切り替える。切替回路部12は、複数の検出電極のうち第2の状態から第1の状態へ切り替えられる二以上の検出電極を一つずつ選択する。制御部13は、第2の状態から第1の状態へ切り替えられる検出電極相互間の距離である第2の距離が上記第1の距離に対応するように切替回路部11を制御する。
(もっと読む)
シフトレバー装置
【課題】シフトレバー上部の操作スイッチの操作で車体側の制御を確実に行なえると共に、構成部品の磨耗や損傷を防止できるシフトレバー装置を提供する。
【解決手段】シフトレバー3の上部に装着され、操作スイッチ5を有するノブ2と、このノブ2に内蔵され、操作部5aの操作に応じてシフトレバー3の軸方向に移動可能な磁性体60と、シフトレバー3のレバー本体30の上端に設けられると共に、車体側端子80に接続され、磁性体60の近接、離間を検知する磁気検知体7とを備えた。
(もっと読む)
エッジ推定装置およびエッジ推定方法
【課題】簡単かつ確実に、検知面に接触した物体のエッジを推定するエッジ推定装置を提供する。
【解決手段】検知面上に配列された複数の圧力検出部(感圧センサ16b)と、圧力検出部が検出した圧力に基づき、隣接する圧力検出部が検出した圧力の圧力差を演算する圧力差演算手段21と、圧力差演算手段21が算出した圧力差の大きさが所定の閾値を超えたか否かを判定し、超えた場合に、当該圧力差を求めた圧力検出部の位置を、検知面に接触した物体のエッジの位置に対応するエッジ点であると判定するエッジ点判定手段22とを備えてエッジ推定装置を構成する。
(もっと読む)
位置検出装置及びシフトレバー装置
【課題】検出手段が故障しても、位置検出に際して誤判定を生じ難くすることができる位置検出装置及びシフトレバー装置を提供する。
【解決手段】シフトレバー3に磁石を設け、装置本体2にMR素子1を設けて、MRセンサ1により磁石の磁界を検出することで、シフトレバー3の操作位置を判定する。シフトレバーはモーメンタリ式をとり、中立位置から他の位置に操作されると、その後、元の中立位置に自動で復帰する。また、MR素子1のセンサ出力で位置判定を行うに際して、シフトレバーが行きと帰りの動きをとるとき、MR素子1の出力が2回変化、つまり往復変化する。よって、MR素子1のセンサ出力が往復変化をとることを確認すると、シフトレバー3を操作有りと判定する。
(もっと読む)
位置センサ
【課題】サーチコイルに対する励磁信号のノイズ的影響を除去することでセンサ出力のS/N比を向上させ、検出誤差を低減すること。
【解決手段】ロータリーエンコーダ1は、ステータコアと、ステータコアと隙間を介して対向しながら回転可能に設けられるロータコアと、ロータコアに設けられ、所定のピッチでジグザグに折り返された励磁コイルと、ステータコアに設けられ、励磁コイルと隙間を介して対向して配置され、所定のピッチでジグザグに折り返されたサーチコイル23と、励磁コイルに供給される励磁信号を出力する励磁信号出力回路31,32,33と、励磁信号と同位相又は逆位相の信号をサーチコイル23から出力されるサーチ信号に注入して合成する注入回路35とを備える。
(もっと読む)
物理量センサ及びマイクロフォン
【課題】検出感度の向上を図ることの可能な磁界検出型の物理量センサ及びマイクロフォンを提供する。
【解決手段】被検出磁界を形成する磁界形成部10と、被検出磁界の第1方向成分Hxに応じた電気信号を出力する磁界検出部4と、外部からの振動入力に応じて第1方向xと交差する第2方向yに磁界形成部10と磁界検出部4とを相対振動させる振動薄膜3とを備えたマイクロフォン1において、磁界形成部10を、磁界検出部4の第2方向y一方側に配置され一組の磁極間に第1磁界H1を発生する第1磁界発生部11と、磁界検出部4の第2方向y他方側に配置され一組の磁極間に第2磁界H2を発生する第2磁界発生部13とから構成する。これにより、第1磁界発生部11と第2磁界発生部13との間に互いの第1方向成分が逆向きの第1磁界H1と第2磁界H2との合成磁界である被検出磁界を形成する。
(もっと読む)
121 - 130 / 998
[ Back to top ]