
国際特許分類[G01B7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 電気的または磁気的手段の使用によって特徴づけられた測定装置 (2,440)
国際特許分類[G01B7/00]の下位に属する分類
点の座標測定用 (9)
長さ,幅または厚みの測定用 (209)
直径測定用 (18)
離隔対象物または離隔開口間の距離または間隙測定用 (63)
固体の変形測定用,例.抵抗ひずみ計によるもの (233)
深さ測定用 (14)
輪郭または曲率測定用 (117)
角度またはテーパ測定用;軸の心合せ試験用 (729)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (45)
国際特許分類[G01B7/00]に分類される特許
91 - 100 / 998
移動体の位置読取装置
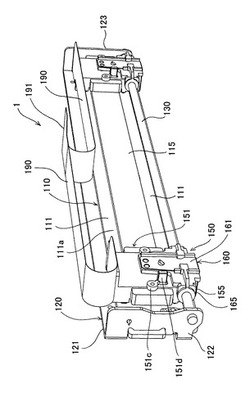
【課題】部品の寸法上の誤差や変形に関わらず移動体の位置を常に正確に読み取ることができる移動体の位置読取装置を提供する。
【解決手段】移動体の移動可能方向に延在形成され移動体の位置を記録する位置記録部110と、位置記録部を配置したフレーム120と、位置記録部と所定距離離間しかつ位置記録部に沿って延在するようにフレームに支持されたガイド軸130と、位置記録部に記録された移動体の位置を読み取る読取部140と、ガイド軸に沿って移動し、読取部が位置記録部と所定間隔隔てて対向配置するように読取部を備えたケース本体150と、ケース本体に備わった読取部とフレームに配置された位置記録部との間隔をケース本体がガイド軸の何れの位置にあっても一定となるようにケース本体を位置記録部に付勢する付勢部材160と、を備えた。
(もっと読む)
変位量検出機構及びこれを備えた斜軸式油圧ポンプ

【課題】 外形寸法を大きくせず、しかも、0点調整が容易な変位量検出機構を提供する。
【解決手段】 複数本のバネを直列に接続し、前記バネ間の接続部の変位をセンサにて検知することを特徴とする。
(もっと読む)
チェンジレバーの位置検出装置、これを備えたチェンジレバーユニット、およびチェンジレバーの位置検出方法
【課題】より簡単の構造でチェンジレバーの位置を精度よく検出する。
【解決手段】チェンジレバーのシフト方向の3つのレンジとチェンジレバーのセレクト方向の3つのレンジとにおけるマグネット2の磁気に対応して出力するホール素子3の電気的シフト位置信号値および電気的セレクト位置信号値をセンサ特性値としてホール素子のメモリに記録する。各レンジ間においては、ホール素子3は、隣接する電気的シフト位置信号値どうしを結ぶシフト側仮想直線および隣接する電気的セレクト位置信号値どうしを結ぶセレクト側仮想直線を用いてセンサ特性値として、ホール素子3の位置に対応した電気的シフト位置信号値および電気的セレクト位置信号値を補完出力する。これにより、種々のばらつきが生じていても、チェンジレバーの位置を精度よく検出可能となる。
(もっと読む)
渦電流探査による構造物の位置検出方法及び位置検出装置
【課題】構造物の表面側及び裏面側に存在する複数種の形状変化部や付属部材の位置を検出する場合、観測波形が各々の信号の重畳した形状となるため、各々を識別した位置検出が困難になる。
【解決手段】高周波数励磁信号と低周波数励磁信号で形状変化部と付属部材の検出信号を抽出し、位相分離検出で形状変化部と付属部材の検出信号を識別するとともに、信号の振幅と幅でしきい値判別して、形状変化部及び付属部材の有無を確認するとともにその中心位置を決定する。
(もっと読む)
操作信号生成装置、および、操作信号生成方法
【課題】ユーザにより操作される機器が誤動作しにくくなるように、適切に操作信号を生成する。
【解決手段】受付部11は、機器を操作するための操作入力であって、ユーザの体の一部によってなされる操作入力を受け付ける。検知部12は、ユーザの体の一部が受付部11に向かって接近する接近速度を検知する。生成部13は、受付部11により操作入力が受け付けられる際に検知部12により検知された接近速度が、あらかじめ設定された基準範囲内である場合、当該操作入力に対応づけられた操作信号を生成する。出力部14は、生成された操作信号を機器に出力する。
(もっと読む)
回転部材用物理量測定装置
【課題】工作機械の主軸が高速回転する状態での検出分解能及び測定精度の確保と、同じく低速回転する状態での応答性の確保との両立を図る。
【解決手段】演算器は、円周方向に隣り合う1対の凹溝10a、10bに基づいて発生する1対のパルス間の周期である部分周期δと、互いに異なる1対の被検出用特性変化組み合わせ部3a、3aに対応する1対のパルス間の周期である全周期Lとの比であるパルス周期比δ/Lに基づいて、前記主軸の軸方向変位量を求める。この主軸の回転速度が所定値よりも低い場合に、(A)に示す様に、前記全周期Lとして、円周方向に隣り合う1対の被検出用特性変化組み合わせ部3a、3aに関する値Laを採用する。これに対して、前記回転速度が前記所定値以上である場合に、(B)に示す様に、前記全周期Lとして、中間を飛ばして存在する1対の被検出用特性変化組み合わせ部3a、3aに関する値Lbを採用する。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
非破壊検査装置、非破壊検査方法
【課題】深さの異なる複数の欠陥が設けられたサンプルを用いることなく、検査対象物の傷の深さを測定できる非破壊検査装置を提供する。
【解決手段】一定の電流値の渦電流を検査対象物の表面に発生させるべく、周波数が高くなると振幅が小さくなる交流電流を励磁コイルに供給する電流供給部と、検査対象物の表面からの磁界を測定して磁界強度に応じた磁界信号を出力する磁気センサを有し、励磁コイルに第1周波数、第1周波数とは異なる第2周波数の交流電流を供給している際に、磁気センサから得られる検査対象物の表面に対して窪んだ傷の近傍の磁界強度に応じた第1磁界信号、第2磁界信号と、磁気センサから得られる検査対象物の表面に設けられた所定深さの穴の近傍の磁界強度に応じた第3磁界信号と、第4磁界信号とを用い、前記第1及び第2磁界信号の値の変化と、第3及び第4磁界信号の値の変化と、所定深さと、に基づいて、窪んだ傷の深さを算出する。
(もっと読む)
チェンジレバーユニット
【課題】位置検出精度のばらつきをより一層抑制して検出結果の安定化を図るとともに、シフトパターンの変更に伴う設計変更をできるだけ抑制する。
【解決手段】ホール素子14b、シフト回動軸4、セレクト回転軸5、チェンジレバー6、およびマグネット14aが1つのユニット本体2に取り付けられて、1つのサブユニットとして構成されている。これにより、チェンジレバー6,マグネット14a、およびホール素子14bがより高精度に位置決めされて設けられている。
(もっと読む)
埋設ケーブルまでの距離を推定する推定方法、及び試掘方法
【課題】埋設ケーブルまでの距離を簡単かつ正確に推定する。
【解決手段】埋設ケーブルまでの距離を推定する推定方法であって、埋設ケーブル上方の第一地点と、前記第一地点から距離Δ離れた第二地点の2地点で磁束密度Bをそれぞれ測定し、測定した2地点の磁束密度Bの比を計算することによって前記第一地点における磁束密度Bの変化率Wを算出し、算出した磁束密度Bの変化率Wに基づいて前記第一地点から埋設ケーブルまでの距離Lを推定する。
(もっと読む)
91 - 100 / 998
[ Back to top ]