
国際特許分類[G01B7/00]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 長さ,厚さまたは同種の直線寸法の測定;角度の測定;面積の測定;表面または輪郭の不規則性の測定 (22,327) | 電気的または磁気的手段の使用によって特徴づけられた測定装置 (2,440)
国際特許分類[G01B7/00]の下位に属する分類
点の座標測定用 (9)
長さ,幅または厚みの測定用 (209)
直径測定用 (18)
離隔対象物または離隔開口間の距離または間隙測定用 (63)
固体の変形測定用,例.抵抗ひずみ計によるもの (233)
深さ測定用 (14)
輪郭または曲率測定用 (117)
角度またはテーパ測定用;軸の心合せ試験用 (729)
面積測定用 (5)
表面の粗さまたは不規則性測定用 (45)
国際特許分類[G01B7/00]に分類される特許
61 - 70 / 998
位置検出装置及びそれを用いたアクチュエータ
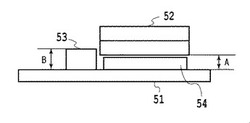
【課題】基板に対する磁気センサと磁石の配置構成の簡素化を図るとともに、検出精度を落とすことなく、汎用的な基板および磁石を用いた場合においても、基板と磁石とのギャップを小さくして装置の小型化、薄型化、軽量化を図ること。
【解決手段】磁気センサ53は、基板51上に少なくとも1個以上が、磁石52を基板51に投影した領域外に配置され、磁気センサ53の感磁方向が基板51に対して垂直である。磁石52は、基板51に平行な平面内で、任意の一方向に移動可能で、基板51からの最近接部の距離Aが、磁気センサ53の最遠隔部の距離Bよりも基板51の近くに支持されるように磁気センサ53と同じ面側に配置され、移動方向にN極とS極が並んで着磁された磁石である。
(もっと読む)
測位装置、測位方法、プログラム、及び記録媒体

【課題】外部装置と通信できない状況においても絶対位置を取得することができる測位装置、測位方法、プログラム、及び記録媒体を提供する。
【解決手段】測位装置100,200,300は、地磁気を検知する地磁気検知部101と、絶対位置と対応づけられた上記地磁気の全磁力及び伏角の値を含む地磁気情報を記憶する記憶部103と、上記地磁気検知部により検知された地磁気の全磁力及び伏角の値と、上記地磁気情報とを照合し、該当するエリアを抽出する抽出部105と、上記抽出部により抽出されたエリアから現在位置を特定する特定部107とを有する。
(もっと読む)
変位検出装置
【課題】変位検出装置において、全長を短縮する。
【解決手段】変位検出装置1は、検出コイル2と、検出コイル2に対して変位可能に設けられた変形可能な変位体3と、外部からの作用を受けて変位することにより、変位体3を変位させる変位取り出し部5と、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を変形させて曲線軌道で変位させる巻取り部4a、4bとを備える。巻取り部4a、4bは、変位体3が変位取り出し部5により変位させられるときに、変位体3の少なくとも一部を巻取ることによって、変位体3の少なくとも一部を変形させて曲線軌道で変位させる。変位体3は、変位取り出し部5により変位させられるとき、巻取り部4aに巻取られると共に巻取り部4bから繰り出され、又は、巻取り部4bに巻取られると共に巻取り部4aから繰り出される。これにより、変位検出装置1の全長を短縮することができる。
(もっと読む)
圧延ロール位置測定装置
【課題】圧延ロールとギャップセンサとの間の間隙を制御する必要が無く、圧延ロールが緊急退避した場合でもギャップセンサが破損したり、圧延ロールの表面に疵が付いたりすることのない圧延ロール位置測定装置を提供する。
【解決手段】圧延ロール位置測定装置10は、下圧延ロール12の圧延面14までの距離を測定するギャップセンサ23及び圧延面14に向けて流体Wを噴出する噴出口24を有するギャップ測定部17と、ギャップ測定部17の下方に設置され、内部に流体Wが供給される容器20と、容器20に対するギャップ測定部17の相対変位を測定する変位計19と、ギャップ測定部17に変位計19を介して連結され、容器20内に充填される流体Wの浮力でギャップ測定部17を押し上げる浮体部25とを備えている。
(もっと読む)
位置検出構造
【課題】基体48に対して相対移動する移動物体20における互いに離れた2位置への移動を検出する位置検出構造において、互いに離れた2位置への移動物体の移動を単一のセンサで、誤検出なく区別して検出する。
【解決手段】基体(ホルダ)48と移動物体(プラットホーム)20との対向部位の一方で、前記2位置のうちの一つの位置に検出センサ50を設け、該検出センサは、各位置において互いに異なった電気信号を発生する。一つの検出センサが2位置でそれぞれ異なった信号を発生するので、一つのセンサで2位置への移動物体の移動を区別して検出することができる。
(もっと読む)
車両変速機用操作装置
【課題】検出手段の数を少なくできる車両変速機用操作装置を得る。
【解決手段】シフトレバー20と一体に移動する銅片112と鉄片114がセレクト操作方向に互いに対向して設けられており、この銅片112と鉄片114との間に近接センサ82〜90の検出コイル84〜92がシフト操作方向に並んだ状態で設けられている。シフトレバー20を左側シフト孔62側へセレクト操作すると銅片112が検出コイル84〜92に接近し、右側シフト孔64側へセレクト操作すると鉄片114が検出コイル84〜92に接近する。銅片112や鉄片114が検出コイル84〜92に接近すると、検出コイル84〜92の周囲に形成される高周波磁界が変化するが、銅片112が検出コイル84〜92に接近した場合と鉄片114が検出コイル84〜92に接近した場合とでは高周波磁界の変化が異なるため、少ない近接センサ82〜90で多くのシフトレバー20の位置を検出できる。
(もっと読む)
位置検出装置及び位置検出方法
【課題】温度特性のバラツキを解消し、縦方向のガタツキによる誤差をなくすようにした位置検出装置及び位置検出方法を提供すること。
【解決手段】ホール素子(22a)のホール電圧Vhe1は、A・K・Bhe1(Aはプレアンプ(32)の増幅率、Kは定数、Bhe1はホール素子が受ける磁束密度)になったとすると、PIレギュレータ(41)はフィードバック制御によってA・K・Bhe1+Vref=AGND(=0)になるように、PI出力のバイアス点を自動的に変化させる。増幅後のホール素子(22b)のホール電圧Vhe2はA・K・Bhe2となる。K=−Vref/A・Bhe1であるから、ホール素子のホール電圧Vhe2は、−Vref・Bhe2/Bhe1となる。ホール電圧は、磁束密度と比例するので、ホール素子(22a)とホール素子(22b)の出力電圧を割り算していることと等価である。
(もっと読む)
近接センサ
【課題】検出コイルを金属製の外殻で覆っても、渦電流損失を小さく抑え、必要十分な位置検出感度を得ることができる近接センサを提供する。
【解決手段】二つのコイルに矩形波電圧を印加して、各々のコイルに流れる電流を独立して検出してから差動回路等で差を演算するのではなく、直接電流の差の値を検出することにより、S/N比が良好であり高感度な近接センサを実現できる。また、各々のコイルは同じ磁気特性と電気特性を備えるため、温度変化でこれらの特性が変化したとしても夫々同じように変化するので、温度変化に起因するばらつきが生じ難い。
(もっと読む)
位置検出装置及び撮像装置
【課題】誘導磁気の影響を抑えて高精度に位置を検出する。
【解決手段】本発明に係る位置検出ユニット100は、磁気コイル106cを有し、磁力により駆動力を発生させるボイスコイルモータ106と、ボイスコイルモータ106により駆動されるレンズ移動枠102と、レンズ移動枠102の位置を検出するMRセンサ110と、磁気コイル106cに流れる電流に基づいて、MRセンサ110の出力を補正する補正部(検出アンプ122、減算部126)と、を備える。
(もっと読む)
測定装置
【課題】非接触距離センサによって棒体との間隔の変化を検出しこれに基づいて棒体の作動状態を測定する測定装置を提供する。
【解決手段】軸方向へ移動する棒体の表面に対して非接触状態で対向配置されて該表面との間の距離の変化を検出する非接触距離センサの検出信号に基づいて棒体の作動状態を測定する。係る構成によれば、上記距離の変化状態から、棒体の移動開始・停止位置とか、移動時間・時期を正確に判断することができ、延いては、棒体の軸方向への移動量や移動速度を取得できる。
(もっと読む)
61 - 70 / 998
[ Back to top ]