
国際特許分類[G01C3/06]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 距離,水準または方位の測定;測量;航行;ジャイロ計器;写真計量または映像計量 (22,094) | 視準線上の距離測定;光学的距離計 (1,749) | 細部 (1,609) | 最終指示値を得るための電気的手段の使用 (1,608)
国際特許分類[G01C3/06]の下位に属する分類
電気的輻射検出器の使用 (5)
国際特許分類[G01C3/06]に分類される特許
41 - 50 / 1,603
レーザレーダ装置
【課題】装置の周囲において三次元的に物体を認識し得るレーザレーダ装置において、駆動制御の複雑化を抑え、三次元的な認識の高速化を図り得る構成を提供する。
【解決手段】レーザレーダ装置1には、複数の受光素子21が二次元的に配置されてなる受光センサ20が設けられ、この受光センサ20は、ミラー30の上方側において反射部31によって導かれた反射光を受光領域にて受光する構成をなしている。一方、レーザダイオード10から外部空間に照射されるまでのレーザ光L1の投光経路には、凸状鏡71が配置され、偏向部41から外部空間に向かうレーザ光L1を少なくとも中心軸42aの方向に拡がらせている。そして、外部空間からの反射光が偏向部41に入射するときの入射の向きに対応して受光領域での反射光の入射位置が定まるように構成されている。
(もっと読む)
ボンディング装置

【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
画像処理装置
【課題】パターンマッチングの対象となる一対の画像データにおける空間周波数の偏差を抑制することで、適切にパターンマッチングを遂行する。
【解決手段】画像処理装置120は、ベイヤー配列で構成される一対の画像データにおいて、各画素に未設定の色相の輝度を隣接する画素に基づいて復元する色復元部172と、一対の画像データにおいて、各画素に予め設定されている色相の輝度を周囲の画素に基づいて合成する色合成部174と、一対の画像データそれぞれから所定の大きさのブロックを抽出してマッチングを行い、相関性の高いブロック同士を特定するマッチング処理部180と、を備える。こうして、空間周波数の偏差を抑制して適切にパターンマッチングを遂行することが可能となる。
(もっと読む)
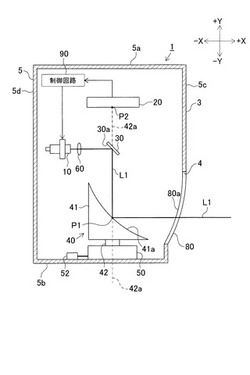
レーザレーダ装置
【課題】カバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、フォトダイオード20の受光面20aの前方側且つ下方側にフィルタ部材90が配置され、このフィルタ部材90は、当該フィルタ部材90の下面90aとのなす角度が小さくなる光ほど透過を抑制する角度依存性を有すると共に、透過板80から受光センサ側に向かう斜め方向の外乱光の透過を抑制するように構成されている。また、上記フィルタ部材90は、上下方向の光については透過するように構成されているため、凹面鏡41によって上方に導かれる正規の反射光(外部空間の物体からの反射光)については、フィルタ部材90を透過する際に抑制されにくくなる。
(もっと読む)
半導体装置の駆動方法
【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
車載用カメラ
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
(もっと読む)
空間情報検出装置
【課題】複数個の発光素子を用いて強度変調光を投光し、かつ投光と受光とのタイミング調整の期間を備える構成で、タイミング調整の期間における消費電力を抑制する。
【解決手段】発光素子11は群121,122,123に分けられ、群121,122,123ごとに設けた通電制御素子13により光出力が制御される。動作モード選択部103は、基準信号Sg0に対する検出信号Sg2の時間差を計測する校正モードと、発光素子11から強度変調光を投光してから受光素子21が受光するまでの時間を計測する測定モードとを選択する。測定モードでは、検出信号Sg2の基準信号Sg0に対する時間差が規定値に維持されるように電圧制御遅延回路1013による遅延時間が設定される。経路選択部15は、校正モードが選択されているときに、発光素子11のうちの1つの群121に対応する通電制御素子13にのみ通電する。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法
【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置を、レーザビームの走査面を90°以内で変化可能な構成とし、走査面を一方向に角度45°だけ傾けて距離Laを測定し(S3)、次は走査面を逆方向に90°だけ傾けて距離Lbを測定する(S4,S5)。測定距離La,Lbより地面内の第1基準水平方向に対して傾いている角度θcを算出し(S6)角度θc傾ける(S7)。次に走査面を地面と直角にして(S8)距離Ld1,Ld2を夫々測定し(S10,S11)、その測定結果よりレーザビームが基準角度0°にある状態で第2基準水平方向と平行になるまでの角度差θxを算出すると(S12)、本体を地面の方向に角度差θxだけ傾けて走査面を90°回転させる(S14)。
(もっと読む)
センサ装置
【課題】対象物の検出範囲がより広いセンサ装置を提供する。
【解決手段】センサ装置1は、センサ装置1の外方向に光を照射する発光素子2及び入光レンズ3と、対象物により反射された光を集光する集光レンズとしての受光レンズ4と、受光レンズ4により集光された光を受光する受光部としてのPSD5aと、を有する。PSD5aの受光面は、凹形状に湾曲している。センサ装置1は、対象物からの反射光を、凹形状に湾曲したPSD5aの受光面により受光するため、対象物の測定範囲をより広くすることができる。
(もっと読む)
41 - 50 / 1,603
[ Back to top ]