
国際特許分類[G01S13/75]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999) | 受信波から電力供給を受ける応答機を使用するもの,例.受動的応答機を使用するもの (109)
国際特許分類[G01S13/75]に分類される特許
41 - 50 / 109
画像処理装置及び画像処理システム及び画像処理方法及び画像処理プログラム
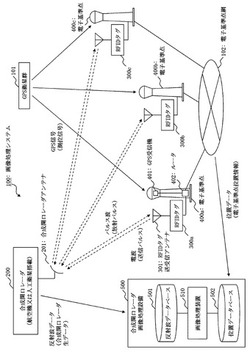
【課題】能動的に電波を放射するRFIDタグなどを利用して、合成開口レーダの再生画像から特定の位置を容易に検出し、その位置に合わせて再生画像を補正する装置を提供することを目的とする。
【解決手段】画像処理装置510は、合成開口レーダ200からのパルス波に応じてRFIDタグ300aから送信された電波と地表からの当該パルス波の反射波とを反射波データとして反射波データベース501から取得する。そして、RFIDタグ300aから電波により送信された識別子データを反射波データから取得する。また、RFIDタグ300aの識別子データに対応する設置データを位置データベース502から取得し、その設置データにより示された電子基準点400aから位置データを取得する。画像処理装置510は、反射波データに基づいて地表の画像を生成し、位置データに基づいて当該画像を補正する。
(もっと読む)
DME地上装置とその応答効率モニタ方法

【課題】応答効率を継続的にモニタすることの可能なDME地上装置とその応答効率モニタ方法を提供すること。
【解決手段】監視制御部30により生成された擬似質問パルスのトランスポンダ部20への転送経路途中に可変利得増幅器40を設ける。そしてこの可変利得増幅器40の利得を制御して、応答パルスレート制御の実施の如何によらず、擬似質問パルスのレベルを、質問パルスの受信レベル閾値よりも高いレベルに、常時保つようにする。
(もっと読む)
位置情報生成システム、位置情報生成装置、コンピュータプログラム及び位置情報生成方法
【課題】車両などの移動体の位置を精度よく特定することができる位置情報生成システム、該位置情報生成システムを構成する位置情報生成装置、該位置情報生成装置を実現するためのコンピュータプログラム及び位置情報生成方法を提供する。
【解決手段】車載機100は、第1の信号を路側機の第1通信部及び第2通信部へ送信し、路側機の第1通信部及び第2通信部が送信した第2の信号を受信することにより、車載機100の第1通信部からの距離L1を算出するとともに、車載機100の第2通信部からの距離L2を算出する。車載機100は、第1通信部及び第2通信部の位置を中心とした円又は球の交点を自身の位置として特定して位置情報を生成する。
(もっと読む)
無線端末装置およびゲイン調整方法
【課題】送受信信号の信号レベルを合わせるように調整することにより、信号レベル差による誤差発生を防止し、距離測定の精度を向上させることが可能である。
【解決手段】信号の送受信を行う無線通信部1と、無線通信部1による送受信信号の信号レベルを増幅する信号増幅・フィルタ部3と、増幅された送受信信号のうち、予め設定された所定の検出閾値よりも大きい信号レベルの信号を送信信号または受信信号として検出するADC4と、ADC4による検出結果に基づく無線通信の信号の往復時間から電波伝播遅延時間を計測して相手無線端末装置との間の距離を求めるとともに、信号増幅・フィルタ部3のゲイン調整を行う測定制御・時間計測部5とを備え、上記往復時間の測定時に、送信信号と受信信号との信号レベルを合わせることで、電波減衰による測定精度の低下を防止する。
(もっと読む)
距離測定装置
【課題】トランスポンダの動作を監視する監視処理部自体の動作の監視を確実に行い、トランスポンダを正確に動作させるDME(距離測定装置)を提供する。
【解決手段】受信信号の受信及び応答信号の送信を実行するトランスポンダ12aと、受信信号と同一の形式であって、トランスポンダ12aの動作を監視するためのトランスポンダ検査信号を定期的に出力するトランスポンダ検査手段131と、トランスポンダの監視動作を検査するためのセルフ検査信号を定期的に出力するセルフ検査手段132と、トランスポンダからトランスポンダ検査信号に応答して出力される応答信号及びセルフ検査信号を入力して、トランスポンダ及びトランスポンダの監視動作を判定する判定手段137とを有する監視処理部13aと、判定手段137の判定結果に基づいてトランスポンダ12a及び監視処理部13aの動作を制御する制御部15とを備える。
(もっと読む)
二次監視レーダ装置
【課題】従来の監視方法では監視が困難であったモードS機の応答状態を把握しやすくする。
【解決手段】オールコール期間とロールコール期間とを設定して、航空機を捕捉するモードS二次監視レーダ1であって、オールコール期間にロールコール質問を送信する送信手段122と、ロールコール質問に対応したロールコール応答を受信する受信手段123と、予めオールコール期間に設定されたタイミングで受信したロールコール応答を解読する解読手段132とを備える。
(もっと読む)
無線周波数識別タグを含む物体の成形方法
インサート成形プロセスまたはインモールド加飾プロセスによって、例えば容器などの物体に無線周波数識別タグを取り付ける方法。このような方法は、を例えば容器などの物体に無線周波数識別タグを取り付ける製造プロセスを簡素化するために利用することができる。成形プロセスは、例えば射出成形、ブロー成型、加圧成形、トランスファ成形、および回転成形などの、従来の成形プロセスであってもよい。しかしながら、従来の成形プロセスは、成型品を形成する前に無線周波数識別タグをモールドの空洞に挿入することによって、修正される。修正された成形プロセスの結果、成型品のポリマ材によって封入された無線周波数識別タグを有する成型品ができる。 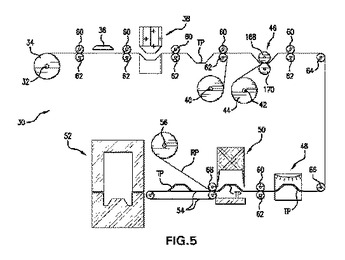 (もっと読む)
(もっと読む)
距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、および距離測定プログラム
【課題】非接触IC媒体が移動していても、高精度な距離測定を実行できる距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、距離測定プログラム、および距離測定用応答プログラムを提供する。
【解決手段】リーダ装置から非接触IC媒体へ向けて第1周波数により問合せ信号を送信し、前記非接触IC媒体に前記第1周波数を第2周波数により変調させて変調後の周波数により応答信号を送信させ、前記リーダ装置が前記応答信号を受信して複数の周波数成分を取得し、取得した各周波数成分を用いて少なくとも2つの周波数成分の信号の間の位相差を算出し,該位相差を用いて前記リーダ装置から前記非接触IC媒体までの距離を測定する構成とした。
(もっと読む)
無線タグシステムおよび無線タグ
【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
物品管理システム
【課題】どの作業者が何処でどの物品を運搬したかを管理することを可能にする。
【解決手段】物品が運搬中であるか所定の場所に置かれたかの状態の遷移を検知して、その状態遷移のタイミングで物品と人物の位置を測位しその測位結果に基づいて物品と人物とを紐付ける。
(もっと読む)
41 - 50 / 109
[ Back to top ]