
国際特許分類[G01S13/76]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 電波の再放射を使用する方式,例.二次レーダ方式;類似の方式 (999) | パルス形信号を送信するもの (203)
国際特許分類[G01S13/76]の下位に属する分類
国際特許分類[G01S13/76]に分類される特許
71 - 80 / 165
距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、および距離測定プログラム
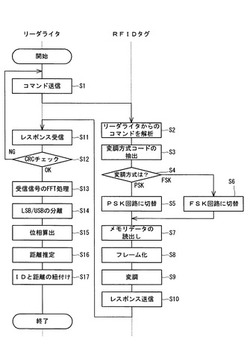
【課題】非接触IC媒体が移動していても、高精度な距離測定を実行できる距離測定方法、距離測定装置、非接触IC媒体、距離測定システム、距離測定プログラム、および距離測定用応答プログラムを提供する。
【解決手段】リーダ装置から非接触IC媒体へ向けて第1周波数により問合せ信号を送信し、前記非接触IC媒体に前記第1周波数を第2周波数により変調させて変調後の周波数により応答信号を送信させ、前記リーダ装置が前記応答信号を受信して複数の周波数成分を取得し、取得した各周波数成分を用いて少なくとも2つの周波数成分の信号の間の位相差を算出し,該位相差を用いて前記リーダ装置から前記非接触IC媒体までの距離を測定する構成とした。
(もっと読む)
無線タグシステムおよび無線タグ

【課題】簡易なシステムで、然も、確実に、鳥獣被害での動物の行動把握や犬猫などのペットが逃げた時の位置の検出把握、或いは、自動車やバイクなどの盗難での所在場所の探索を行えるようにする。
【解決手段】無線タグ12を探索対象に取り付け、無線タグ12からのビーコンを無線機11で受信する。無線タグ12は、通常送信時には、ビーコン用の周波数チャネルを選び、送信間隔を広くして、ビーコンを送信する。一方、自身の属する受信エリア10から外れると、そのエリアの親となる無線機11からの信号が受信できなくなる。この時には、無線タグ12は、探索時の専用の周波数チャネルに変更して、送信間隔を短くして、ビーコンを連続送信させる。さらにこの無線タグの送信を受信した情報を会員サーバ15にアップロードすることで、他の利用者の探索に協力できるようにする。
(もっと読む)
ツインパルスの検出方法
【課題】航空機とDME間で送受信されるパルスにマルチパス妨害が発生した場合や、ノイズが重畳した場合であってもパルスの検出を可能にする。
【解決手段】ツインパルスを含む信号を入力するステップと、信号と、信号を所定のパルス幅で遅延させた第1遅延信号との乗算結果を、信号に含まれるパルスを表すパルス検出信号として求める第1演算ステップと、パルス検出信号と、パルス検出信号を所定のパルス間隔で遅延させた第2遅延信号との乗算結果を、信号に含まれるツインパルスを表すツインパルス検出信号とする第2演算ステップとを有する。
(もっと読む)
物品管理システム
【課題】どの作業者が何処でどの物品を運搬したかを管理することを可能にする。
【解決手段】物品が運搬中であるか所定の場所に置かれたかの状態の遷移を検知して、その状態遷移のタイミングで物品と人物の位置を測位しその測位結果に基づいて物品と人物とを紐付ける。
(もっと読む)
通過検知システム、通過検知装置、及び、入退場管理装置
【課題】複数の通過ゲートを近接して配置した場合でも、無線タグが通過する通過ゲートを特定することができるようにする。
【解決手段】入場ゲート2A及び退場ゲート2Bを通過する利用者Xを管理する入退場管理装置10において、前記利用者Xが所持する無線タグ20から送信される電波を、前記入場ゲート2A及び前記退場ゲート2Bごとに設けたループアンテナ6のそれぞれの受信信号強度Eに基づいて、前記利用者Xが前記入場ゲート2A及び前記退場ゲート2Bのどちらを通過したかを特定する構成とした。
(もっと読む)
モードS二次監視レーダ
【課題】モードS二次監視レーダによるトランスポンダの捕捉の精度を向上させる。
【解決手段】ロールコール期間で捕捉する登録機に関する情報が登録される登録テーブル138と、ロールコール期間における捕捉の対象の候補である仮登録機に関する情報が登録される仮登録テーブル137と、オールコール期間に登録機以外の航空機からオールコール応答以外の信号を受信したとき、航空機を仮登録機として仮登録テーブル137に登録する仮登録部132dと、ロールコール期間に登録機にロールコール質問を送信するとともに、仮登録機にロールコール質問を送信する送信制御部131と、ロールコール質問に応答して、仮登録機からロールコール応答を受信したとき、仮登録機を新たな登録機として登録テーブルに登録する登録部132eとを備えている。
(もっと読む)
解読装置
【課題】二次監視レーダ装置から送信されたモードS信号を正確に復調(解読)する。
【解決手段】モードS質問信号を位相データと振幅データとに変換する変換部14と、振幅データに基づいて、モードS質問信号のP1パルスまたはP2パルスの立上がりまたは立下りの少なくともいずれかのタイミングを検出するパルス検出部15と、検出されたタイミングに基づいて、P6パルスの立上がりのタイミングを特定するとともに、P6パルスの立上りから同期位相反転位置までの位相データをモードS質問信号の位相のずれ量として検出する位相検出部16と、同期位相反転位置からP6パルスの終了までの位相データに対し、位相のずれ量分の補正を施す補正処理部17と、ずれが補正された位相データを復調することで質問データを解読する復調処理部19とを備えている。
(もっと読む)
物体探索装置、物体探索システム及び無線通信端末
【課題】 予め探索対象物体(例えば、物品、生物、人間など)の位置情報を登録することなしに、その探索対象物体が現在何処にあるのかを明らかにする物体探索システムを提供する。
【解決手段】 本発明による物体探索システムは、探索対象物体を探索する物体探索装置と、探索対象物体に付けられている無線タグとを備える物体探索システムであって、物体探索装置は、無線タグと通信をする無線通信手段と、無線タグと電波を送受信する際の電波情報に基づいて無線タグとの間の距離を測定する手段と、距離を測定した測定位置の位置情報を取得する手段と、2以上の異なる測定位置において距離が測定されると、距離と測定位置の位置情報とに基づいて探索対象物体の位置を推定する手段と、推定された位置に関する情報を出力する出力手段とを有することを特徴とする。
(もっと読む)
モードS二次監視レーダ及び位相判定システム
【課題】送信するモードS質問における信号の内容、位相反転の状態、波形の性能等P6パルス(データブロック)に関する性質を確実かつ容易に確認することができるモードS二次監視レーダを提供する。
【解決手段】航空機に搭載されているトランスポンダ2に対し、DPSKによりデータの位相が反転されたデータブロックを含むモードS質問を送信する送信部121aと、モードS質問の生成するとともに、モードS質問と同期し、モードS質問のデータブロックの位相を反転しない基準信号を生成する生成部112と、モードS質問の位相反転を判定する計測器3に、モードS質問及び基準信号を出力する出力手段121bとを備える。
(もっと読む)
DME地上装置
【課題】インタロゲータの周波数のチャンネル割り当ての中心周波数から900kHz以上離れたインタロゲータの信号を処理しない機能を、ローコストで実現するためのDME地上装置を提供すること。
【解決手段】DME地上装置10のトランスポンダ部20は、受信した質問信号をIF信号に変換し、変換されたIF信号をAD変換後に、このAD変換された質問信号と、この質問信号を中心周波数として±900kHzに対しての3つの検波出力を算出し、算出された3つの検波出力の大小を比較判断することにより、応答信号の送出を決定する。
(もっと読む)
71 - 80 / 165
[ Back to top ]