
国際特許分類[G01S13/91]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | 電波の反射または再放射を使用する方式,例.レーダ方式;波長または波の性質が無関係または不特定の波の反射または再放射を使用する類似の方式 (5,353) | 特定の応用に特に適合したレーダ方式または類似の方式 (1,783) | 交通制御用のもの (112)
国際特許分類[G01S13/91]の下位に属する分類
速度測定のためのもの (1)
国際特許分類[G01S13/91]に分類される特許
91 - 100 / 111
制御装置及び制御方法及びプログラム
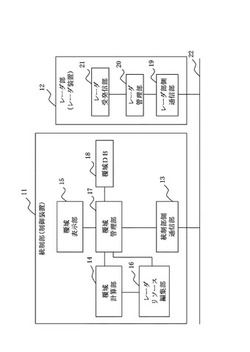
【課題】複数のレーダ局のレーダリソースの利用効率を向上させるレーダ覆域制御装置を実現する。
【解決手段】統制部11において、レーダリソース編集部16が、レーダ部12の制御のための複数のパラメータが含まれるレーダリソースデータについて、いずれかのパラメータの値の変更を指示する設定データをユーザから入力し、設定データに従って対応するパラメータを変更し、覆域計算部14が、レーダリソース編集部16によりパラメータが変更されたレーダリソースデータに基づき覆域計算を行い、覆域管理部17が、覆域計算結果に基づきレーダ部12の覆域を表示するための覆域表示データを生成し、覆域表示部15が覆域表示データを表示し、また、覆域管理部17は、覆域計算結果を表す制御命令を生成し、統制部側通信部13が、制御命令をレーダ部12に送信して、レーダ部12の制御を行う。
(もっと読む)
計器着陸システムの望ましくない信号を除去する方法及びシステム

【課題】 航空誘導システムにおいて望ましくない信号を除去する。
【解決手段】
航空誘導システムにおいて望ましくない信号を除去する方法は、振幅変調の第1の周波数を有する、少なくとも1つの第1の望ましい信号を受け取るステップと、振幅変調の第2の周波数を有する、少なくとも1つの第2の望ましい信号を受け取るステップと、前記第1と第2の望ましい信号の少なくとも1つと実質的に同じかあるいはその低調波である周波数を含む任意の周波数を有する少なくとも1つの望ましくない信号を受け取るステップを含む。前記振幅変調の第1と第2の周波数は位相が同期しており、前記望ましくない信号は前記第1と第2の望ましい信号の少なくとも1つと同期しない。この方法は、前記望ましくない信号を識別するステップと、当該望ましくない信号を除去するステップとも含む。
(もっと読む)
航空交通制御システムに用いられる情報処理装置
【課題】本来のシステムによる警報出力が不能な状態となったとしても、簡易方式によって警報監視を継続して警報出力することを可能にする。
【解決手段】情報処理装置14において、レーダ装置10からレーダ情報を取得するレーダ情報取得部21を設ける。制御部20は、レーダ情報取得部21により取得されたレーダ情報をもとに、航空機と同航空機に対して衝突の可能性がある対象物の位置を表示制御部35を通じて表示装置37において表示させる。衝突判定処理部24は、制御部20により表示される航空機と対象物の位置とが重なるか否かに基づいて航空機の対象物に対する衝突の可能性を判定する。制御部20は、衝突判定処理部24により衝突の可能性があると判定された場合に警報を出力する。
(もっと読む)
衝突危険予測システム、および、プログラム
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
位置標定システム及び車載装置
【課題】移動体の位置精度を改良し、将来の高精度化への課題を解決する。
【解決手段】移動体から発射された電波を反射するレーンマーカ13と、レーンマーカ13が設置された位置を示す位置情報を送信するビーコン11、12と、移動体に搭載される車載装置14とを備え、車載装置14は、レーンマーカ13に対する移動体の位置を検出する位置検出手段と、ビーコン11、12から送信されたレーンマーカ13の位置情報を取得する位置情報取得手段と、レーンマーカ13に対する移動体の位置及びレーンマーカ13の位置情報に基づいて算出した移動体の位置により移動体の位置を標定する位置標定手段とを備える。
(もっと読む)
撮影制御装置、撮影制御方法および撮影制御プログラム
【課題】 高速で移動する移動体(航空機)を自動で追尾撮影することを目的とする。
【解決手段】 管制装置30においてレーダーデータ処理装置32は、レーダー装置20が取得した航空機のレーダーデータを入力し、航空機の位置(緯度、経度、高度)や航空機の移動状態(方位、速度、加速度)を示すデータを取得する。カメラ制御装置35は、撮影装置10が実際に航空機を撮影する時刻とその時刻における航空機の位置とを入力データに基づいて特定する。このとき、カメラ制御装置35はカメラ制御装置35の処理時間、撮影装置10を制御するデータの伝送時間、撮影装置10の駆動時間、遮蔽物の存在、カメラ11の駆動範囲等に基づき撮影装置10が実際に航空機を撮影する時刻を特定する。また、航空機の移動状態に基づいてその時刻における航空機の位置を特定する。そして、特定した時刻において特定した位置を撮影するように撮影装置10を制御する。
(もっと読む)
レーダ信号処理装置
【課題】 船舶などの目標を正確に検出することができるレーダ信号処理装置を得ることを目的とする。
【解決手段】 ASDEから出力されたレーダビデオのスレッショルドレベルを算出し、そのスレッショルドレベルより大きい振幅を有するレーダビデオを検知するヒット検定処理部6を設け、ヒット検定処理部6により検知されたレーダビデオに含まれているクラッタを縮小化する収縮処理を実施し、収縮処理後のレーダビデオに対する2次元移動平均処理を実施してノイズレベルを算出し、そのレーダビデオとノイズレベルを比較して目標とクラッタを区別する。
(もっと読む)
物体検出方法及び装置
【課題】検出された物体が交通弱者のような特定物体かどうかを、当該物体が遠方に在る場合にも、正確、且つ確実に精度良く識別し得るようにした物体検出方法及び装置を提供する。
【解決手段】パルスレーザ光が照射されて所定の走査領域を走査し、光反射物体から反射光として戻ってくるまでの時間tを基に光反射物体までの距離Lを求めると共に、光反射物体からの反射光を基に求めた反射光強度H及び距離Lを基に検出した物体データの点群のうちに、最大反射光強度値Hmaxが、基準距離Loと基準反射光強度Hoから定まる反射光強度閾値HL以上のものがある場合に、当該物体データは視覚障害者や車椅子両者等の特定物体であると判定する。
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
91 - 100 / 111
[ Back to top ]