
国際特許分類[G01S7/02]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 無線による方位測定;無線による航行;電波の使用による距離または速度の決定;電波の反射または再輻射を用いる位置測定または存在探知;その他の波を用いる類似の装置 (17,599) | グループ13/00,15/00,17/00による方式の細部 (3,965) | グループ13/00による方式のもの (2,705)
国際特許分類[G01S7/02]の下位に属する分類
そのために特に適合されたHFサブ方式の細部,例.送信機,受信機に共通なもの (562)
表示装置 (98)
パルス方式の細部 (874)
非パルス方式の細部 (14)
対妨害手段 (74)
妨害手段,例.偽エコーを生じさせるもの (66)
監視または校正用の手段 (468)
物標の特徴づけのためエコー信号の分析を用いるもの;物標の特色;物標の断面 (1)
レーダに特有なダイバーシチ方式 (2)
国際特許分類[G01S7/02]に分類される特許
501 - 510 / 546
レーダー装置及び送信ビーム制御方法

【課題】 レンジ方向に関する分解能やクラッタ抑圧性能を低下させることなく、遠距離目標及び近距離目標を効果的に監視することができるレーダー装置を提供する。
【解決手段】 レーダー波を送信し、空中線を介して移動目標による反射波を受信するレーダー装置であって、所定のパルス諸元に基づいて送信パルス信号を生成する送信パルス信号生成手段と、送信パルス信号に基づいて、送信パルス数が異なる2以上の送信ビームをレーダー波として形成する送信ビーム形成手段と、送信パルス数が異なる各送信ビームを順次に走査するビーム走査制御手段と、受信信号に基づいて送信ビームごとにビデオ信号を生成する受信手段とを備え、ビーム走査制御手段が、ビデオ信号のデータ更新周期を送信ビームごとに異ならせて各送信ビームの走査を行うように構成される。
(もっと読む)
車載レーダ装置

【課題】 電波をレーダ波とするレーダ装置において、路側物の検出を精度を向上させる。
【解決手段】 信号解析処理でのFFT処理結果に基づいて生成した受信ベクトルX(k)をユニタリ変換し、そのユニタリ変換された受信ベクトルY(k)に基づき、次式を用いて、過去の受信ベクトルを反映し、且つユニタリ変換された相関行列Ryy(k)を生成する(S210〜S240)。
Ryy(k)=α・Ryy(k−1)+(1−α)・Y(k)YH(k)
この相関行列Ryy(k)に基づいて生成したMUSICスペクトラムから静止物標に対応する候補点を抽出し、この候補点と、虚像を発生させる原因となった物標に対応する重要候補点とを用いてハフ変換を行うことで、路側物の配列状態を検出する(S250〜S320)。
(もっと読む)
ミリ波イメージング装置
【課題】画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得る
ことができるミリ波イメージング装置を提供する。
【解決手段】図1のミリ波イメージング装置は、受信されたミリ波により像を撮像するミリ波帯撮像器C1およびミリ波帯撮像器C2と、ミリ波帯撮像器C1に接続されるアンテナANT1、ミリ波帯撮像器C2に接続され、アンテナANT1からのミリ波の照射方向と同一の照射方向にミリ波を照射し反射したミリ波を受信するアンテナANT2、を有するアンテナ送受信系とを備え、アンテナANT1とアンテナANT2の一方が他方に対し照射方向にオフセットされていることで、ミリ波帯撮像器C1の画像とミリ波帯撮像器C2の画像を処理することにより、信号可干渉性に起因する歪みを除去した画像を得ることができる。
(もっと読む)
障害物検出装置
【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
到来方向推定装置及び到来方向推定方法
【課題】 到来方向推定に必要な演算量を低減しつつ高精度に到来方向推定を行う。
【解決手段】 複数のアンテナ素子の各前記アンテナ素子の受信信号から相関行列を計算し、前記相関行列の固有値を計算し、前記固有値を用いて到来電波の数を推定し、各前記アンテナ素子の受信信号を用いて離散フーリエ変換に基づくアルゴリズムにより到来電波の概略の到来方向を推定し、前記概略の到来方向に基づいて前記到来電波の到来方向を推定する方向範囲としての演算範囲を決定し、前記第1の到来波数と、推定された前記概略の到来方向の数とが一致する場合は前記離散フーリエ変換に基づくアルゴリズム、一致しない場合は当該アルゴリズムより到来電波の検出能力が高いアルゴリズムに基づき、前記演算範囲について到来方向の推定を行う。
(もっと読む)
オーバーラップするサブアレイアンテナアーキテクチャ
電子的に走査されるアレイアンテナの1実施形態は、アレイの高さHを有する放射素子6のアレイ100を含んでいる。放射素子の複数のサブアレイ1−6は、相互に水平にオーバーラップしない第1の複数のサブアレイを含む第1の行と、第2の複数のサブアレイを含む第2の行を含んでいる。第2の行のサブアレイは第1の行のサブアレイに垂直に隣接して配置され、第2の複数のサブアレイのサブアレイは相互に水平にオーバーラップしない。サブアレイの放射素子は任意の他のサブアレイと共有されない。放射素子のサブアレイはアレイの高さよりも小さいサブアレイの高さを有している。別の実施形態では、操縦されるサブアレイアンテナにおける格子ローブの形成を抑制する方法は第1のサブアレイに対して第1の照射関数を適用し、第2のサブアレイに対して第2の照射関数を適用するステップを含んでおり、第1の照射関数は第2の照射関数とは異なる。 (もっと読む)
コンパクトなCTSフィードおよびMEMS位相シフタを有する広帯域二次元電子的走査アレイ
マイクロ電子機械システム(MEMS)の操縦可能な電子的に走査されるレンズアレイ(ESA)アンテナとその周波数走査方法とが開示されている。MEMS ESAアンテナは広帯域のフィードスルーレンズ11と、連続横断スタブ(CTS)フィードアレイ12とを含んでいる。広帯域のフィードスルーレンズ11は広帯域放射素子14の第1および第2のアレイと、その放射素子14の第1と第2のアレイとの間に配置されているMEMS位相シフタモジュール18のアレイとを含んでいる。連続横断スタブ(CTS)フィードアレイ12は近視野で平面波頭を与えるための放射素子14の第1のアレイに近接して配置されている。MEMS位相シフタモジュール18はCTSフィードアレイ12から放射されたビームを二次元で操縦する。 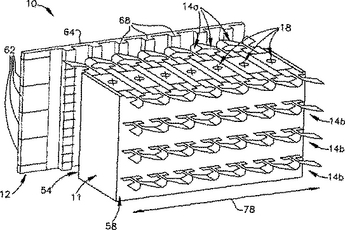 (もっと読む)
(もっと読む)
アレーアンテナ
【課題】1GHz以上の高い周波数帯域においても使用することができ、走査範囲が広く、かつ、走査速度が従来よりも高い小形のアレーアンテナを実現すること。
【解決手段】液晶23は、直方体形状に充填されており、その直方体のzx平面に平行な2つの側面上には、電極27a,27bが配設されている。この2つの電極27a,27bにはそれぞれ線路が接続されており、この両電極間には可変制御可能な電圧V2が印加できる様に電気回路が形成されている。一方、接地板26は接地電位(0v)に維持されている。また、幅広部211aや幅広部211bにも略同様の線路が接続されており、これらの各電位は、所望の電位V1に可変設定可能になっている。なお、主線路21aの幅広部211aや主線路21bの幅広部211bの電位は、上記の電気回路と同等の回路を用いて何れの単位パターン20においても同じ値(V1)に設定する。
(もっと読む)
ウェイト関数生成方法、参照信号生成方法、送信信号生成装置、信号処理装置及びアンテナ装置
【課題】 時間軸上での特性改善に際し、周波数領域でのロス分を低減する。
【解決手段】 ウェイト関数生成のための処理構成は、窓関数生成部(14)にて予め選定した窓関数(ハミング窓、ハニング窓、ガウス窓、ブラックマンハリス窓、フラットトップ窓等)の波形を生成し、この波形を中心ストレッチ処理部(15)に送る。この処理部(15)では、矩形波生成部(16)で生成される単位期間を示す矩形波を取り込み、窓関数の波形を振幅ピーク点から左右に引き伸ばして矩形波に合わせた波形を生成し、これをウェイト関数としてウェイト関数格納部(17)に格納する。
(もっと読む)
アレーアンテナ
【課題】1GHz以上の高い周波数帯域においても使用することができる、走査範囲の広い小形のアレーアンテナを実現すること。
【解決手段】 図4−Bの状態図は、アクチュエータ27が力点において応変追従機構28を図面の下方に押した状態を示している。この動作の結果、応変追従機構28は支点29の周りで回動するので、上記の作用点は上方に移動し、これに伴って誘電体23も上方に並進する。この単位パターン20においては、作用点と支点との間の距離は、力点と支点との間の距離よりも長いので、この回動動作において、アクチュエータ27が上記の力点を押し下げる距離よりも、誘電体23の移動量は長くなっている。即ち、力点、支点、作用点の3点の間の関係を上記の様に設定することにより、上記の応変追従機構28には、アクチュエータ27の動作を増幅する増幅機能が与えられている。
(もっと読む)
501 - 510 / 546
[ Back to top ]