
国際特許分類[G01V3/12]の内容
物理学 (1,541,580) | 測定;試験 (294,940) | 地球物理;重力測定;塊状物または対象物の検出;タグ (3,730) | 電気的または磁気的探鉱または検出;地球の磁場特性,例.偏角または偏差の測定 (1,166) | 電磁波で働くもの (300)
国際特許分類[G01V3/12]に分類される特許
41 - 50 / 300
埋設物探査装置
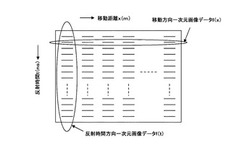
【課題】地中レーダ装置の受信信号に含まれる縞状ノイズ成分を容易に除去して画像の視認性を向上する。
【解決手段】2次元画像データにおける全ての反射時間軸方向の1次元画像データf(t)について、1次元ウェーブレット解析により時間−周波数領域へ変換して時間−周波数データを算出して縦縞ノイズの周波数成分を算出した後、ノイズ成分を抽出する第1フィルタリング処理を実行し、元の2次元画像データから抽出した縦縞ノイズ成分を除去する第2フィルタリング処理を実行して縦縞ノイズを除去し、更に、2次元画像データにおける全ての移動距離軸方向の1次元画像データf(t)について、同様のノイズ除去処理を実行して横縞ノイズを除去する。
(もっと読む)
異物検査機の動作確認の機能及び異物検査機

【課題】動作確認の必要な異物検査機を使用している検査工程において、動作確認を必ず実行する機能を提供する。
【解決手段】動作確認が必要なときに当該機能を有効にし、機能が一旦有効になってから、最初に通過する被検査体を異物を含有するテストピースであるとみなし、異物検出部より不良信号が出たときは、動作確認が行われたとして通常状態に戻り、異物検出部より不良信号が出ないときは動作確認を忘れたか怠った場合か異物検出部が異常である場合とし、異常警報を出す機能を設ける。
(もっと読む)
イメージング装置およびイメージング方法
【課題】対象物体から放射や反射されるミリ波をアンテナやアンプなどで構成されるセンサによって計測してイメージングを行うイメージング装置において、メカ機構の負担を少なくし、さらに、計測有効範囲を拡大する。
【解決手段】センサ群124A,124Bを回転物体121の回転面に配置する。回転物体121を回転させることで、センサ群124Aが誘電体レンズ110により有効範囲1に結像された第1の被写体像IM1をスキャンし、被写体像IM1の各画素の信号が取得される。また、回転物体121を回転させることで、センサ群124Bが誘電体レンズ110および反射板126により有効範囲2に結像された第2の被写体像IM2をスキャンし、被写体像IM2の各画素の信号が取得される。反射板を動かしてスキャンを実現する従来技術に比べて、メカ機構の負担を少なくできる。計測有効範囲として、有効範囲1の他に、有効範囲2が加わる。
(もっと読む)
トンネル切羽前方探査装置
【課題】正確にトンネル前方の地中の状態を探査できる装置を提供する。
【解決手段】トンネル切羽前方の地盤内を探査する装置であって、台車1と、台車1に搭載し、円の軌跡上を移動する電磁レーダーのアンテナ2と、アンテナ2の軌跡上の位置を知る回転角発生装置と、台車1に搭載した固定枠5と、固定枠5の前面に取り付けた可撓体3と、データを収録、解析する解析装置とより構成する。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
トンネル切羽前方探査装置
【課題】正確にトンネル前方の地中の状態を探査できる装置を提供する。
【解決手段】トンネル切羽前方の地盤内を探査する装置であって、台車1と、台車1に搭載し、円の軌跡上を移動する電磁レーダーのアンテナ2と、アンテナ2の軌跡上の位置を知る回転角発生装置と、電磁レーダーのアンテナ2と切羽との距離を測定する測距装置21と、アンテナ2の切羽側に位置した板体であって、アンテナ2の移動方向の前方をソリ状に形成した摺動体7と、摺動体7のトンネル軸方向への移動を許容する伸縮治具と、データを収録、解析する解析装置とより構成した。
(もっと読む)
監視センサ及びプログラム
【課題】浴室内に被監視者以外の動きがある場合であっても、浴室内に在室する被監視者の動きの有無を正確に判定することが可能な、監視センサ及びプログラムを提供する。
【解決手段】監視センサ1は、浴室70内における動きを検出し、その検出の結果を信号S1として出力するドップラセンサ10と、信号S1の値と浴室70が有する浴槽71の湯面の揺れに起因する外乱要因を除去するための閾値とを比較する比較部30と、信号S1に対して所定のフィルタ処理を施すことにより、信号S2を出力するLPF20と、信号S2の値と浴室70内のシャワー72からの放水に起因する外乱要因を除去するための閾値とを比較する比較部31と、比較部30及び比較部31による比較の結果に基づいて、浴室70内に在室している被監視者の動きの有無を判定する判定部50と、を備える。
(もっと読む)
誘電率特定装置、誘電率特定方法及び誘電率特定プログラム
【課題】植生等が存在する地域においても、高精度に地表面の誘電率を特定することを目的とする。
【解決手段】ブリュースター角特定部32は、観測対象へ放射した垂直偏波の電波に対する反射波の信号強度を入射角毎にプロットし補間して描かれる線における凹みの底の位置の入射角を、観測対象のブリュースター角として特定する。ブリュースター角は、被観測体の誘電率に応じて異なるため、誘電率特定部33は、特定したブリュースター角から観測対象の誘電率を特定する。
(もっと読む)
探索支援装置、探索支援方法、及びプログラム
【課題】物品の探索作業の効率性を簡便に向上させること。
【解決手段】所定の空間においてそれぞれ異なる位置に配置された複数の電波放射手段の電波強度を個別に変化させ、それぞれの前記電波放射手段ごとに、探索対象の識別情報が記憶されたICタグが検出される前記電波強度の境界値を探索する境界値探索手段と、前記所定の空間における位置情報と前記電波放射手段ごとの電波強度の組み合わせとの対応情報を記憶した対応情報記憶手段を用いて、前記境界値探索手段によって探索された前記境界値に対応する前記位置情報を特定する配置位置判定手段とを有する。
(もっと読む)
SARデータ処理方法及びSARデータ処理システム
【課題】山岳地域のような地形歪みがある地域におけるバイオマス量の推定を可能とする。
【解決手段】地上の標高に係るDEMデータからSARシミュレーション画像データを作成する(S104)。作成されたSARシミュレーション画像データを、SAR画像データに一致させるようにパラメータを選択する(S106)。一致させたSARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの地形歪み量を算出する(S107)。SARシミュレーション画像データとSAR画像データとに基づいて、SAR画像データの散乱強度を算出する(S108)。SAR画像データに対し、地形歪み量補正及び散乱強度補正を施し、地形歪みがある地域におけるバイオマス量の推定を行う。
(もっと読む)
41 - 50 / 300
[ Back to top ]