
国際特許分類[G08G1/16]の内容
物理学 (1,541,580) | 信号 (47,547) | 交通制御システム (25,881) | 道路上の車両に対する交通制御システム (25,491) | 衝突防止システム (7,349)
国際特許分類[G08G1/16]に分類される特許
221 - 230 / 7,349
前方障害物検知装置
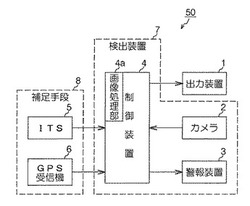
【課題】遠方からでも交差点路面内にレーザーマーカーを形成でき、且つ検出したマーカーによって他車両がどの方向から交差点に進入してくるかを判定することができる前方障害物検知装置を提供する。
【解決手段】本実施形態の前方障害物検知装置50は、自車両が走行する路面上に該自車両を特定する自車両マーカーを投射する出力装置1と、自車両が走行する路面と交差する路面上に投射された自車両マーカー、及び他車両を特定する他車両マーカーを検出して、衝突の可能性があるか否かを判断する検出装置7と、交差点内でのマーカー生成位置の特定、及び障害物への衝突可能性を判断する制御装置4と、マーカーの位置を特定するために見通しの悪い交差点においても、相手車両の存在を早期に認知できるITSシステム5、及び自車両の正確な位置を特定するGPS受信機6を有する補足手段8と、を備えて構成されている。
(もっと読む)
並列処理システム及び車両走行システム

【解決課題】動画を高速処理して必要情報を抽出する並列処理システム、及び並列処理システムを用いてリアルタイムな動画情報を基に車両の安全走行を行う車両走行システムの提供。
【解決手段】並列処理システム1は、大量のデータをn個のデータ集合体に区分する信号変換部30、信号変換部30からのn個のデータ集合体を処理するデータ処理部50、信号変換部30及びデータ処理部50が連結されているルータ40を具備する。データ処理部50は、区分されたn個のデータ集合体が割り当てられ、割り当てられたデータ集合体を同時並行処理して、所定の処理データを出力するn個のプロセッサ51、ルータ40を介して、n個のプロセッサのそれぞれから出力されるn個の処理データを受け入れ、n個の当該処理データを統合して全体処理を行って所望の加工データを出力する1個のマスタプロセッサ52を含む。
(もっと読む)
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
車両用表示装置
【課題】乗員に現状の先行車両と自車両との車間距離を容易に把握させることで、乗員に与える安心感を向上させる。
【解決手段】本発明に係る車両用表示装置10は、自車両100の走行情報を表示する自車両モデル11と、上記自車両100の進行方向で走行する先行車両の走行情報を表示する先行車両モデル12と、上記自車両100及び先行車両の車間距離を表示する車道モデル13と、を備えて構成されている。
(もっと読む)
偏光画像による車両位置検知方法及びシステム
【課題】偏光画像による車両位置検知方法及びシステムを提供する。
【解決手段】かかる方法は、偏光カメラにより路面の偏光画像を取得する段階と、取得された前記偏光画像中の路面及び路肩の違いに基づいて、前記偏光画像中の路肩を算出し、算出された路肩間の部分を路面部分と決定する段階と、前記偏光画像における車両の車輪の画素値と実際の路面の画素値との顕著な差に基づいて、決定された前記路面部分における少なくとも一つ以上の推定車両底部を識別する段階と、識別された前記推定車両底部の各々に対し、前記偏光画像における車両の輪郭の画素値と背景の画素値との差に基づいて、対応する推定車両底部による推定車両位置を取得する段階を含む。
(もっと読む)
車間距離算出装置およびそれを用いた車両制御システム
【課題】車載単眼カメラで検出した先行車両までの距離を、精度よく計測する。
【解決手段】自車に搭載された1つの撮像部から得られた画像から、他の車両の画像領域を検出する車両検出部と、前記他の車両の車両型式を識別する車両型式識別部と、車両固有の車体寸法に関する情報を格納したデータベースと、前記他の車両の画像における前記車体寸法相当の画素数を計測する車体寸法画素数算出部と、前記車両型式識別部で識別された車両型式に関して前記データベースを照合して、前記他の車両の前記固有の車体寸法を算出する車体寸法算出部と、前記他の車両の固有の車体寸法と前記車体寸法相当の画素数とに基づき、自車から前記他の車両までの距離を算出する車間距離算出部とを有する。
(もっと読む)
車両の旋回予測装置
【課題】従来にない新たな方法で車両の旋回を予測する装置を提供する。
【解決手段】車両10に搭載された画像センサからカメラ情報を取得し、車両の旋回を予測する旋回予測装置において、画像センサが、車両の前方を撮影することで撮影画像を繰り返し取得し、取得した撮影画像中の光源の位置座標、および、当該光源が先行車の光源か対向車両の光源かを示す情報を、カメラ情報として繰り返し出力すると、当該カメラ情報に基づいて、当該光源が、撮影画像中に新たに現れた対向車両20の光源であり、かつ、撮影画像中の左端付近の所定の領域または右端付近の所定の領域にあるか否かを判定し、判定結果が肯定的な場合、車両10の進行方向にカーブがあると判定する。
(もっと読む)
安全運転支援装置
【課題】リアルタイム性を大きく損なうことなく、受信した情報の各々に基づくユーザへの有意な注意喚起を、音声メッセージによって行う「安全運転支援装置」を提供する。
【解決手段】出力する音声メッセージを、全て、対象物の位置/方向を表す位置提示メッセージ要素と、対象の種別を表す種別提示メッセージ要素と、対象物の状態を表す状態表示メッセージ要素とを、当該順序で読み上げた音声メッセージとする。そして、出力しようとする音声メッセージと同じ位置提示メッセージ要素が過去所定期間内に出力した音声メッセージに所定数以上連続して含まれているときには、出力しようとする音声メッセージの位置提示メッセージ要素のみを出力する。
(もっと読む)
道路付属物検出装置、道路付属物検出方法、及びプログラム
【課題】道路標識やガードレールなどの道路付属物を高精度に自動的に検出する。
【解決手段】記憶装置6は検出対象とする道路付属物の画像特徴情報36及び、対象空間における検出対象の形状などに関する形態特徴情報38を予め格納する。画像分割手段20は対象空間を撮影した画像をそれぞれ類似する画素からなる複数の部分画像領域に分割する。候補画像領域抽出手段22は画像特徴情報36に基づいて、部分画像領域のうち検出対象に対応した候補画像領域を抽出する。壁面検出手段24は、対象空間の地物表面の三次元形状を表す点群データに基づいて地物の壁面を検出する。候補壁面抽出手段26は形態特徴情報38に基づいて、検出された壁面のうち検出対象に対応した候補壁面を抽出する。照合手段28は候補画像領域と、画像の撮影位置から見た候補壁面の投影像とを照合し、照合結果に基づいて検出対象を検出する。
(もっと読む)
運転支援装置
【課題】車載カメラを用いて障害物に対して通過が可能か等の視覚支援をドライバーに与えて運転支援を実現する。
【解決手段】車両15に設置された前方カメラ111の画像に消失線を重畳させて表示し、進行あるいは後行方向における障害物と車両15の接触に関する予測を可視化できるようにした。これにより、ドライバーは、降車による目視、確認作業が必要であるような車両と構造物距離が近く通り抜けが困難なシーンにおいても、車室内にて直視的に接触可能性を判断することが可能となる。
(もっと読む)
221 - 230 / 7,349
[ Back to top ]