
国際特許分類[H02P5/00]の内容
電気 (1,674,590) | 電力の発電,変換,配電 (135,566) | 電動機,発電機,回転変換機の制御または調整;変圧器,リアクトルまたはチョークコイルの制御 (18,002) | 2以上の電動機の速度またはトルク調整または制御に特に適した装置 (756)
国際特許分類[H02P5/00]の下位に属する分類
互いに関連する2以上の電動機の速度調整用 (181)
直流および交流電動機の組合せを制御するもの (3)
2以上の直流電動機を制御するもの (59)
2以上の交流電動機を制御するもの (297)
国際特許分類[H02P5/00]に分類される特許
51 - 60 / 216
モータ駆動装置

【課題】クラッチや複合遊星歯車を使用せずに、2つのモータのロータ間の位相を変えることのできるモータ駆動装置を提供する。
【解決手段】2つのモータMa,Mbと、この各モータMa,Mbのモータ軸11a,11bの出力が伝達される出力軸20とを備え、一方のモータMaのティースに巻回された巻線と他方のモータMbのティースに巻回された巻線とが接続されたモータ駆動装置であって、一方のモータMaのロータRaと、他方のモータMbのロータRbとの間の位相を可変するロータ位相可変機構を設け、このロータ位相可変機構は、モータMaのモータ軸11aの出力を出力軸20に伝達するとともにロータRaの軸方向に移動可能な伝達部材30a,30bを有し、この伝達部材30a,30bは、軸方向の移動量に応じた量だけロータRa,Rbを回動させる。
(もっと読む)
電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法

【課題】垂直軸や外力が掛かる状況で大きなストロークで使用する電動機が含まれる複数軸の軸間を含む機械特性を多軸伝達関数として測定するとともに、制御器の安定度を把握し、機械特性に合わせた軸間を含めた制御器の調整度合いを把握できる相互一巡開ループ伝達関数を算出する電動機制御装置および該装置の相互一巡開ループ伝達関数算出方法並びに多軸伝達関数算出方法を提供する。
【解決手段】複数軸の電動機制御装置において、自己一巡開ループ伝達関数算出部8と、相互一巡開ループ伝達関数算出部9と、機械特性演算部11と、特性演算部10と、を備える。
(もっと読む)
モータ駆動装置及び電動車両
【課題】電力変換器の出力可能な最大電圧を増加させ、弱め界磁電流を低減させて効率を向上させると共に、装置全体の低コスト化、小型化を図ったモータ駆動装置及び電動車両を提供する。
【解決手段】モータM1に交流電力を供給するインバータ3と、その正負直流母線間に接続された第1の電源としての鉛蓄電池1と、モータM1の中性点と直流母線の正極または負極との間に接続された第2の電源としての電気二重層キャパシタ2と、インバータ3の半導体スイッチング素子をオンオフ制御する制御回路30と、を備え、前記半導体スイッチング素子をオンオフ制御してキャパシタ2と正負直流母線との間でエネルギーを授受可能としたモータ駆動装置において、キャパシタ2の放電終止電圧を、正負直流母線間の電圧のほぼ1/2とする。
(もっと読む)
拡張されたダイナミックレンジに亘ってトルクを迅速に発生させるための、低イナーシャを有する装置
本発明は、トルク設定点に応じて出力部材(3)上にトルクを発生させるための装置に関し、装置は、出力部材が連結されるシャフト(2)を有する、第1動力の少なくとも一つのモーター(1)又は少なくとも一つの小モーターを含む第1モーターユニットと、結合手段(4)を介して出力部材に回転可能に連結されるシャフト(12)を有する、第1動力よりも高い第2動力の少なくとも一つのモーター(11)又は少なくとも一つの大モーターを含む第2モーターユニットと、サーボ制御手段(50)とを含み、サーボ制御手段(50)は、トルク設定点(Msp)に応じて、粘性結合手段が、トルク設定点に適合する粘性トルク(Mvisc)を提供するように第2モーターユニット(11)に動力を与え、且つ、これと並行して、第1モーターユニット(1)が、粘性トルクがトルク設定点の値に到達するまで、トルク設定点と粘性トルクとの間の付加トルクを生成するように第1モーターユニット(1)に動力を与えるべくプログラムされる。 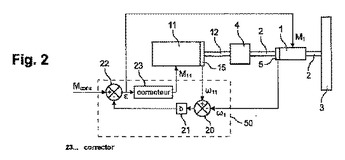 (もっと読む)
(もっと読む)
サーボドライバ
【課題】従来のサーボドライバは、第1及び第2回生抵抗の一方のみで回生電力が消費されて、第1及び第2回生抵抗の他方が使用されない状態が発生するので、部品使用効率が悪くなっている。
【解決手段】本発明によるサーボドライバでは、Pバスライン301とNバスライン302との間に、回生抵抗400とスイッチ回路401とが互いに直列に設けられている。第1及び第2電圧検出回路106,206は、第1及び第2電圧109,209が所定電圧値を超えた場合に、スイッチ回路401を閉成して、回生電力108a,208aを共通の回生抵抗400で消費させる。
(もっと読む)
モータ同期制御装置
【課題】各軸の制御入力が制限を受けた場合であっても、高精度に各軸の同期を維持することを可能とするモータ同期制御装置を得ること。
【解決手段】2軸以上のモータを個別に駆動する2以上のモータ駆動制御装置のそれぞれが生成する、各軸に共通の位置指令と自軸モータで検出された位置検出値との差分である自軸モータの位置偏差を補正する位置補正量を入力とし、前記2以上の位置補正量のうち最も応答の遅い位置補正量を同期後位置補正量として選択する整形量同期部4aを備え、前記2以上のモータ駆動制御装置のそれぞれは、自軸の前記位置偏差から前記同期後位置補正量を減算した修正位置偏差を用いて自軸モータへの制御入力を計算することを特徴とする。
(もっと読む)
バックラッシュを抑制するサーボ制御装置
【課題】ポジションタンデム制御のモータ制御装置においてプリロードを付加することで、ショックを抑えることができるサーボ制御装置を提供する。
【解決手段】1つの被駆動体を駆動する2台のモータ15,25と、位置偏差値を演算処理して速度指令値を出力する位置制御部11,21と、速度指令値と速度検出器17,27から帰還される速度フィードバック値とに基づいて積分要素と比例要素で処理してトルク指令値を出力する速度制御部12,22と、トルク指令値に基づきモータの駆動電流を制御する電流制御部13,23と、速度制御部12,22の一方の積分要素の出力を他方の積分要素にコピーする速度積分器共通化手段5と、2台のモータ間のバックラッシュを抑制するために、各々のトルク指令値にそれぞれプリロードトルク値を付加する補正部6を備え、補正部は時定数回路を有し、プリロードトルク値を所定時定数に基づき徐々に付加する。
(もっと読む)
生産設備、制御装置、制御方法、制御プログラム
【課題】消費電力のピークを無くして生産設備全体として消費電力の平準化を図る。
【解決手段】回生電力を発生させることのできる動力装置であって、同一の電力源104に接続される第一動力装置110、及び、第二動力装置120と、第一動力装置110と、第二動力装置120とのそれぞれの消費電力を監視する監視部133と、第一動力装置110が回生電力を発生させる場合に、その回生電力を消費可能にし、電力を多く消費する傾向になるように第二動力装置120を制御する、または、第一動力装置110が電力を多く消費する傾向となる場合に、回生電力を発生させるように第二動力装置120を制御する回生制御部134と、を備える。
(もっと読む)
多軸モータドライブシステムとその共通コンバータの過負荷保護方法及び装置
【課題】共通コンバータのコストやサイズの増大化を回避して、かかる瞬時的な過大電流に対しても、この共通コンバータを保護することができるようにする。
【解決手段】各サーボアンプ3a〜3cにおいて、電流指令値Ii*と速度検出値ωiと直流電圧検出値Vdciとから夫々の消費電流値Iia,Iib,Iicを求め、コンバータ出力電流演算部21でこれらを加算して総合消費電流値Icvoを求め、時限演算部22でこの総合消費電流値Icvoに該当する補完値f(Icvo)をデータベースから求めて過負荷判定値Is(k)を求める。そして、過負荷判定部23において、過負荷判定値Is(k)を共通コンバータ2(図7)の容量に応じた判定閾値Ithと比較し、Is(k)≧Ithときには、共通コンバータ2は過負荷状態にあるものとして、サーボアンプ3a〜3cの動作を停止させる。
(もっと読む)
画像形成装置
【課題】ピーク電流を抑制しつつ高速な起動が可能なモータ制御を実行する画像形成装置を提供する。
【解決手段】CPUは、画像形成装置の電源がオンされたかどうかを判断する(ステップS1)。CPUは、電源がオンされたと判断した場合には、次に、モータ間通信を開始する(ステップS2)。そして、次に、CPUは、モータ台数を確認する(ステップS3)。CPUは、モータ台数に応じて位相ずらし量を設定する(ステップS4)。具体的には、モータ台数(N)に応じて位相ずらし量を1/N周期に設定する。そして、次に位相ずらし量を設定する指示を出力する(ステップS5)。
(もっと読む)
51 - 60 / 216
[ Back to top ]