
タイヤ状態監視装置
【課題】車両の走行状態が変化する場合でも、車輪に取り付けられた送受信ユニットを確実に起動させ、送受信ユニットを起動させるための第1の信号の再送による消費電力の増大を防止する。
【解決手段】タイヤ状態監視装置の車体側装置は、それぞれ割り当てられた所定範囲に対して、車輪12A、12B、12C、12Dに取り付けられた送受信ユニット18A、18B、18C、18Dを起動するための第1の信号を送信する複数の送信アンテナ17A、17B、17C、17Dと、第1の信号によって起動された送受信ユニットが送信する第2の信号を受信する受信機19と、前記車両走行開始後に、各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部21を具備する。
【解決手段】タイヤ状態監視装置の車体側装置は、それぞれ割り当てられた所定範囲に対して、車輪12A、12B、12C、12Dに取り付けられた送受信ユニット18A、18B、18C、18Dを起動するための第1の信号を送信する複数の送信アンテナ17A、17B、17C、17Dと、第1の信号によって起動された送受信ユニットが送信する第2の信号を受信する受信機19と、前記車両走行開始後に、各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部21を具備する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車体に設けられた車体側装置と、車両の各車輪に取り付けられた送受信ユニットとの間で無線通信して、各送受信ユニットが取り付けられた各車輪のタイヤ状態情報を取得するタイヤ状態監視装置に関する。
【背景技術】
【0002】
従来、車体に装着されたタイヤの空気圧や温度等のタイヤ状態を監視するTPMS(Tire Pressure Monitoring System)が知られている(例えば、特許文献1)。TPMSでは、各車輪にタイヤ状態を検出するセンシング機能と無線通信機能を備えた送受信ユニットが直接取り付けられ、車体側に送受信ユニットとの間で無線通信する車体側装置が備えられる。車体側装置は、各車輪の送受信ユニットを起動するための信号(第1の信号)を送信する送信アンテナと、起動された送受信ユニットから送信される信号(第2の信号)を受信する受信機と、受信機で受信された信号に含まれるタイヤ状態情報からタイヤ状態を監視するコントローラとが設けられる。
【0003】
かかるTPMSにおいて、車体側装置の送信アンテナから送受信ユニットを起動するための第1の信号を所定タイミングで送信して送受信ユニットを周期的に起動し、起動した送受信ユニットからタイヤ状態情報を含む第2の信号を受信してタイヤ状態を監視する。送受信ユニットを車体側装置からのトリガ(第1の信号)によって起動することで、送受信ユニットの電力消費を低減することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−149832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車輪に直接取り付けられる送受信ユニットは、車両の走行中に車輪の回転角や舵角が変化するので、車体側装置の送信アンテナとの位置関係が大きく変化する。このため、車輪の回転角や舵角によっては、車輪側の送受信ユニットが車体側装置の送信アンテナから送信される起動のための第1の信号を受信できない場合がある。例えば、図6に示すように、送受信ユニットと車体側に取り付けられた送信アンテナANTとの間にホイール等の金属物が介在することとなる位置Aに送受信ユニットが来たときには、ホイール等が両者間の無線通信の障害となって、送受信ユニットを起動できない現象が生じる。
【0006】
このように、従来のTPMSにおいては、車輪の回転角や舵角などの車両の走行状態によっては、当該車輪に取り付けられた送受信ユニットが送信アンテナからの第1の信号を受信できずに起動できない場合がある。かかる場合、当該送信アンテナは、第1の信号の再送を繰返すことから、消費電力が増大するという問題点があった。
【0007】
本発明はかかる点に鑑みてなされたものであり、車輪に取り付けられた送受信ユニットを確実に起動でき、送受信ユニットを起動させるための第1の信号の再送の繰り返しを防止して消費電力を抑制できるタイヤ状態監視装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のタイヤ状態監視装置は、車両の各車輪に取り付けられた送受信ユニットと、前記各車輪が装着された車体に設けられ前記各送受信ユニットとの間で無線通信して前記各車輪のタイヤ状態情報を取得する車体側装置と、を備えたタイヤ状態監視装置であって、前記車体側装置は、それぞれ割り当てられた所定範囲に対して、前記送受信ユニットを起動するための第1の信号を送信する複数の送信アンテナと、前記第1の信号によって起動された前記送受信ユニットが送信する第2の信号を受信する受信機と、前記車両走行開始後に、前記各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部と、を具備することを特徴とする。
【0009】
この構成によれば、車両走行開始後に、送信アンテナから送信した第1の信号で各送受信ユニットの起動を試み、各送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して当該第1の信号の出力条件を制御する。このため、車両の走行状態が変化しても、送信アンテナから出力条件下で送信される第1の信号により、確実に所望の送受信ユニットを起動でき、第1の信号の再送により消費電力が増大するのを防止できる。
【0010】
上記タイヤ状態監視装置において、前記車体側装置は、前記送信アンテナから第1の信号送信時における前記車両の走行状態を示す走行状態情報と、当該第1の信号によって起動された送受信ユニットからの第2の信号の受信数で示される起動成功実績とを関連付けて記憶する記憶部を更に具備し、前記送信制御部は、前記記憶部に記憶された第2の信号の受信数と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、前記第1の信号の出力条件を決定してもよい。
【0011】
この構成によれば、第1の信号に応じた起動成功実績と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、送信アンテナからの第1の信号の出力条件を決定するので、基準となる第1の信号の出力条件をより適切に決定することができる。
【0012】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の回転角を検出する回転角取得部から回転角情報を取得し、取得された回転角情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0013】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の操舵角を検出する操舵角取得部から操舵角情報を取得し、取得された操舵角情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0014】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記車両の走行速度を検出する走行速度取得部から速度情報を取得し、取得された速度情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0015】
上記タイヤ状態監視装置において、前記送信アンテナは、前記車体の右側に配置された右側送信アンテナと、前記車体の左側に配置された左側送信アンテナ、前記車体の後側に配置された後側送信アンテナと、を含み、前記送信制御部は、前記右側送信アンテナからの第1の信号が右前後輪に取り付けられた送受信ユニットで受信され、前記左側送信アンテナからの第1の信号が左前後輪に取り付けられた送受信ユニットで受信され、前記後側送信アンテナからの第1の信号が左右後輪に取り付けられた送受信ユニットで受信されるように、前記右側送信アンテナ、前記左側送信アンテナ及び前記後側送信アンテナから送信される第1の信号の出力条件を制御してもよい。
【0016】
上記タイヤ状態監視装置において、前記送信制御部は、前記出力条件として、第1の信号の出力レベルと出力タイミングを含んでもよい。
【0017】
上記タイヤ状態監視装置において、前記第1の信号は、無線通信可能範囲が車両近傍に制限される第1の周波数に設定され、前記第2の信号は、無線通信可能範囲が前記第1の信号よりも広く、第1の周波数よりも高い第2の周波数に設定されてもよい。
【発明の効果】
【0018】
本発明によれば、車輪に取り付けられた送受信ユニットを確実に起動でき、送受信ユニットを起動させるための第1の信号の再送の繰り返しを防止して消費電力を抑制できる。
【図面の簡単な説明】
【0019】
【図1】本実施の形態に係るタイヤ状態監視装置の全体構成図である。
【図2】本実施の形態に係るタイヤ状態監視装置の詳細機能構成図である。
【図3】本実施の形態に係る記憶部の記憶内容を説明するための図である。
【図4A】本実施の形態に係るタイヤ状態監視装置の動作の一部を示すフローチャートである。
【図4B】本実施の形態に係るタイヤ状態監視装置の動作の他の一部を示すフローチャートである。
【図5】本実施の形態に係るLF信号の送信レベルの制御について説明するための図である。
【図6】従来のタイヤ状態監視装置を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本実施の形態に係るタイヤ状態監視装置について、図面を参照して詳述する。
【0021】
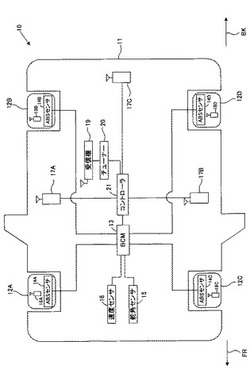
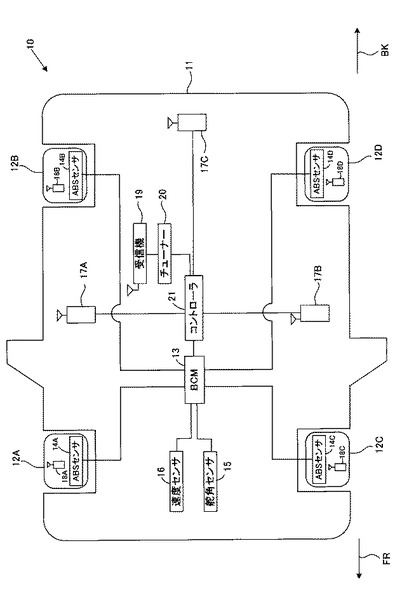
図1は、本実施の形態のタイヤ状態監視装置の全体構成図である。本実施の形態のタイヤ状態監視装置が、4輪の車両10に対して適用された構成を示している。車両10は、車体11と、車体11に取り付けられた4つの車輪12A〜12Dとを備えている。車体11の前方(図1の矢印FR方向)の左右に取り付けられた車輪を左前輪12C、右前輪12Aと呼称し、車体11の後方(図1の矢印FRと反対の矢印BKの方向)の左右に取り付けられた車輪を及び左後輪12D、右後輪12Bと呼称することとする。4つの車輪12A〜12Dを区別しない場合は、必要に応じて「車輪12」と総称する。車体11には、車両10に設けられた各種センサから車両走行状態を示す指標となる各種センシング結果が伝送されるBCM(Body Control Module)13が設けられている。車両10の走行状態を検出する各種センサとして、ABSセンサ14A〜14D(以下、必要に応じて「ABSセンサ14」と総称する)、舵角センサ15、速度センサ16が挙げられる。ABSセンサ14は、車輪12の回転角を検出する。車輪12の回転角とは、車体11に装着された車輪12の車軸に対する回転角である。舵角センサ15は、各車輪12の操舵角を検出する。速度センサ16は、車両10の走行速度を検出する。
【0022】
タイヤ状態監視装置は、第1の信号としてLF信号を送信する送信アンテナ17A〜17C(以下、必要に応じて「送信アンテナ17」と総称する)と、車輪12のタイヤ状態情報を含む第2の信号としてRF信号を送信する送受信ユニット18A〜18D(以下、必要に応じて「送受信ユニット18」と総称する)とを備える。また、タイヤ状態監視装置は、送受信ユニット18から送信されたRF信号を受信する受信機19と、受信機19で受信されたRF信号の復調処理等を行うチューナー20と、チューナー20で復調されたRF信号からタイヤ状態情報を取り込むと共に送信アンテナ17から送信されるLF信号の出力条件を制御するコントローラ21とを備える。
【0023】
車体11に設けられた送信アンテナ17A〜17C、受信機19、チューナー20及びコントローラ21から車体側装置が構成される。
【0024】
送信アンテナ17A、17B、17Cは、それぞれ、車体11の右側中央部分、左側中央部分、後側中央部分に配置される。送信アンテナ17Aは、車両右側の所定範囲に配置される右前輪12A及び右後輪12Bに取り付けられた送受信ユニット18A及び18Bを起動対象ユニットとして予め割り当てられている。また、送信アンテナ17Bは、車両左側の所定範囲に配置される左前輪12C及び左後輪12Dに取り付けられた送受信ユニット18C及び18Dを起動対象ユニットとして予め割り当てられている。また、送信アンテナ17Cは、車両後方の所定範囲に配置される右後輪12B及び左後輪12Dに取り付けられた送受信ユニット18A及び18Bを起動対象ユニットとして予め割り当てられている。なお、送信アンテナ17の数は、送信アンテナ17A、17B、17Cの3つに限られるものではない。また、送信アンテナ17の配置についても、図1に示す配置に限られるものではない。
【0025】
送受信ユニット18A〜18Dは、それぞれ対応する右前輪12A、右後輪12B、左前輪12C、左後輪12Dに取り付けられている。車輪12A〜12Dはそれぞれタイヤおよびホイールを有する。ホイールの外周部には円筒状に形成されたホイールリムが設けられ、このホイールリムの外周上にタイヤが組み付けられる。こうしてタイヤ内部とホイールリム外周によって囲われる領域にタイヤ気室が形成される。送受信ユニット18は、例えば、車輪12のタイヤバルブなどに設けられ、タイヤバルブがホイールのホイールリムに固定されることにより車輪12に取り付けられる。送受信ユニット18は、LF信号を受信すると共にRF信号を送信する無線部と、ICなどで構成される本体部と、タイヤ内の空気圧を検出する圧力センサ、タイヤ気室内温度を検出する温度センサ等のセンサ部と、電源部とを有する。送受信ユニット18が受信したLF信号で本体部が起動して車体側装置との無線通信を開始し、センサ部で検出されるタイヤ状態情報をRF信号で通知し、所定手順を実行した後に再び消費電力を抑制した待機状態に移行する。なお、受信したLF信号で直接発振器を励振させてRF信号を送信する構造であれば電源部は不要である。
【0026】
コントローラ21は、CPUを含むマイクロプロセッサとして構成されており、マイクロコンピュータによる演算を行う演算ユニット、各種の処理プログラムを記憶するROM、一時的にデータやプログラムを記憶してデータ格納やプログラム実行のためのワークエリアとして利用されるRAM、および各種信号の送受信を行うための入出力ポート等を有する。コントローラ21は、ABSセンサ14、舵角センサ15、速度センサ16で検出される検出結果がBCM13を介して入力されると共に、受信機19及びチューナー20で受信されるRF信号が入力される。また、コントローラ21は、各送信アンテナ17に接続され、各送信アンテナ17からのLF信号が起動対象の送受信ユニット18で受信されるように、車両10の走行状態に基づいて、送信アンテナ17からのLF信号の出力条件を制御する。車両10の走行状態としては、例えば、ABSセンサ14で検出される車輪12の回転角、舵角センサ15で検出される操舵角、速度センサ16で検出される車両の走行速度などがあげられる。また、LF信号の出力条件には、送信アンテナ17に割り当てられた起動対象ユニットだけを確実に起動できるLF信号の出力レベルと、起動対象ユニットを確実に起動できる出力タイミングとが含まれる。
【0027】
本実施の形態においては、上記した通り、送受信ユニット18を起動させる第1の信号としてLF信号を用い、タイヤ状態情報を伝達するための第2の信号としてRF信号を用いる。LF信号は、車両右側(右前輪12A、右後輪12B)に配置される送受信ユニット18A,18B、車両左側(左前輪12C、左後輪12D)に配置される送受信ユニット18C,18D、車両後側(右後輪12B、左後輪12D)に配置される送受信ユニット18B,18D、といった具合に、1つのLF信号で起動できる起動可能範囲を区分けできる通信距離であることが望ましい。このため、LF信号は、RF信号よりも通信距離が短く、最大送信レベルであっても車両から大きく離れないような近傍エリアまでを起動可能範囲とする周波数であることが望ましい。例えば、LF信号は30KHz〜300KHz程度の低周波数帯域とすることができ、本例では125KHzを用いるものとする。一方、RF信号は、どの送受信ユニット18から送信されたかを識別できるのであれば、1台の受信機19で全ての送受信ユニット18からのRF信号を受信する構成が望ましい。このため、RF信号は、いずれの送受信ユニット18からでも受信機19で受信可能な通信距離を確保することが望ましく、本例では330Mhz程度の高周波数域を用いる。第1の信号としてLF信号を用いることにより、各送信アンテナ17に割り当てられた所定の送受信ユニット18だけを起動させることができ、第2の信号としてRF信号を用いることにより、1台の受信機19で全ての送受信ユニット18からのRF信号を受信してタイヤ状態情報を確実に収集することができる。
【0028】
また、車体11には、エンジンのON/OFFを切り替えるイグニッションスイッチ(不図示)が設けられてもよい。
【0029】
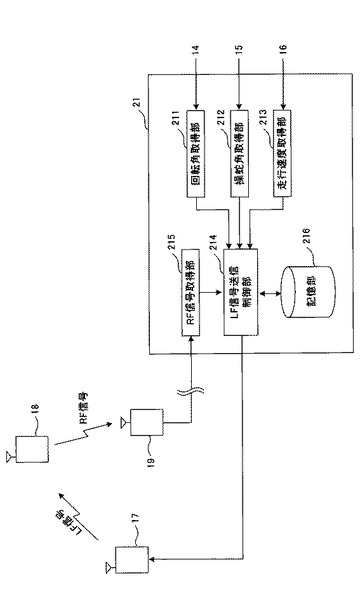
図2は、本実施の形態に係るタイヤ状態監視装置の詳細機能構成図である。図2に示すように、コントローラ21は、ABSセンサ14で検出された車輪12の回転角を取得する回転角取得部211と、舵角センサ15で検出された車輪12の操舵角を取得する操舵角取得部212と、速度センサ16で検出された車両10の走行速度を取得する走行速度取得部213と、送信アンテナ17から送信されるLF信号の出力条件を制御するLF信号送信制御部214と、LF信号で起動された送受信ユニット18から送信され受信機19で受信されたRF信号を取得するRF信号取得部215と、車両10の走行状態情報及びLF信号による起動成功実績情報が記憶される記憶部216と、を具備する。
【0030】
LF信号送信制御部214は、各送受信ユニット18の起動成功実績となる起動ユニット数と車両10の走行状態情報を収集し、送信アンテナ17毎に所定送受信ユニット18の起動成功時の走行状態情報に関連付けてLF信号の出力条件を決定し、現在の走行状態に対応してLF信号の出力条件を制御する。
【0031】
具体的には、LF信号送信制御部214は、LF信号の送信時における車両10の走行状態情報と、LF信号によって起動された送受信ユニット18の数を示す起動ユニット数とを関連付けて記憶部216に記憶させる。なお、LF信号の送信時とは、LF信号の厳密な送信周期のみを示すものではなく、LF信号の送信周期前後の所定の時間幅を有してもよい。LF信号送信制御部214は、記憶部216において記憶された起動ユニット数が所望起動ユニット数となっているLF信号送信時における走行状態情報に基づいて、送信アンテナ毎にLF信号の出力条件を制御する。起動ユニット数とは、送信アンテナ17からのLF信号によって起動された送受信ユニット18の数であるが、送受信ユニット18から第2の信号として送信されたRF信号の受信数としてカウントされる。また、所望起動ユニット数とは、送信アンテナ17毎に予め割り当てられた起動対象送受信ユニット18の数(ここでは、2)である。起動ユニット数と所望起動ユニット数が等しい場合に、起動対象の送受信ユニット18のみが起動されていると判断することができる。
【0032】
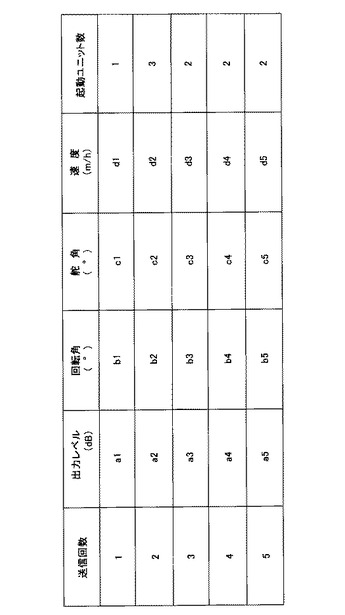
図3は、本実施の形態に係る記憶部216の記憶内容の一例を示す図である。図3に示すように、記憶部216は、送信アンテナ17から第1の信号として送信されたLF信号の送信回数と、各送信回でのLF信号の出力レベル、起動対象の送受信ユニット18(送信アンテナ17に割り当てられた送受信ユニット18)が取り付けられた車輪12の当該LF信号送信時の回転角、舵角、当該LF信号送信時における車両10の走行速度と、当該LF信号によって現実に起動された送受信ユニット18の起動ユニット数と、を関連付けて記憶する。
【0033】
例えば、図3においては、3〜5回目のLF信号の送信時において、起動ユニット数が所望起動ユニット数(ここでは、2とする)と等しくなるので、当該送信アンテナ17に予め割り当てられた所定送受信ユニット18のみの起動に成功したことになる。そこで、LF信号送信制御部214は、起動成功時の走行状態情報(すなわち、3〜5回目のLF信号の送信時におけるLF信号の出力レベル、回転角、舵角、速度の分布)に基づいて、LF信号の出力条件を決定し、決定された出力条件でLF信号を送信するように送信アンテナ17を制御する。なお、LF信号送信制御部214は、上記出力条件の設定を所定周期で行ってもよい。
【0034】
また、LF信号送信制御部214は、回転角取得部211、操舵角取得部212及び走行速度取得部213で取得される回転角、操舵角、走行速度の変化に基づいて、LF信号の出力条件を適宜制御する。例えば、LF信号送信制御部214は、上記図3において取得した条件(ユニット起動時の車輪角)に合わせてLF信号を送信することで所望数以外のユニットが起動するLF送信回数の削減に寄与する。
【0035】
次に、以上のように構成されたタイヤ状態監視装置の動作について説明する。図4A、Bは、本実施の形態に係るタイヤ状態監視装置の動作を示すフローチャートである。また、図5は、送信アンテナ17からのLF信号の送信範囲を示す図である。
【0036】
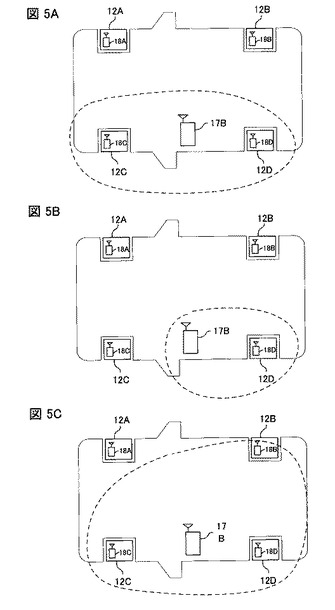
以下では、一例として、図5Aに示すように、送信アンテナ17BからのLF信号が割り当てられている2つの送受信ユニット18C及び18Dのみを起動するように、当該LF信号の出力条件を設定する動作を説明する。なお、図4に示す動作は、所望の送受信ユニット18A及び18Bに受信されるように送信アンテナ17AからのLF信号の出力条件を設定する場合、或いは、所望の送受信ユニット18B及び18Dに受信されるように送信アンテナ17CからのLF信号の出力条件を設定する場合にも適用可能である。
【0037】
図4に示すように、コントローラ21は、車両10のエンジンが起動されたことを検出する(ステップS101)。コントローラ21のLF信号送信制御部214は、車輪確定フラグを初期化する(ステップS102)。ここで、フラグとは、前回EngineON時のタイヤ空気圧が規定内又は規定外であることを記憶してあるフラグである。
【0038】
LF信号送信制御部214は、送信回数Nと起動成功回数N(x)とを「0回」に初期化する(ステップS103)。ここで、送信回数Nとは、送信アンテナ17BからのLF信号の送信回数である。また、起動成功回数N(x)とは、送信アンテナ17BからのLF信号によって所望数(例えば、2)の送受信ユニット18が起動された回数である。
【0039】
LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力条件を初期値に設定する(ステップS104)。上述のように、LF信号の出力条件には、LF信号の出力レベルと出力タイミングが含まれる。
【0040】
送信アンテナ17Bは、LF信号送信制御部214によって初期値に設定された出力条件でLF信号を送信する(ステップS105)。LF信号送信制御部214は、送信アンテナ17BからLF信号が送信された後、上述の送信回数Nに「1」を加算する(ステップS106)。
【0041】
LF信号送信制御部214は、送信アンテナ17BによるLF信号送信時における当該LF信号の出力レベルと、車輪12A〜12Dの回転角及び舵角と、車両10の走行速度とを、送信回数Nに関連付けて、記憶部216に記憶させる(ステップS107)。例えば、1回目のLF信号が送信された場合、LF信号送信制御部214は、図3に示すように、送信回数N「1」に関連付けて、1回目のLF信号の出力レベルa1、当該LF信号の送信時において、回転角取得部211で取得された車輪12A〜12Dの回転角b1、操舵角取得部212で取得された車輪12A〜12Dの舵角c1、走行速度取得部213によって取得された走行速度d1を、記憶部216に記憶させる。
【0042】
LF信号送信制御部214は、ステップS105で送信アンテナ17BからLF信号を送信した後の所定期間内に、受信機19(RF信号取得部215)で受信されたRF信号の数(以下、起動ユニット数という)をカウントし、記憶部216に記憶させる(ステップS108)。例えば、1回目のLF信号が送信された場合、LF信号送信制御部214は、図3に示すように、送信回数N「1」に関連付けて、当該LF信号に応じて受信されたRF信号の数(ここでは、1)を、記憶部216に記憶させる。
【0043】
LF信号送信制御部214は、ステップS108でカウントされた起動ユニット数が所望起動ユニット数と等しいか否かを判定する(ステップS109)。上述のように、所望起動ユニット数とは、送信アンテナ17BからのLF信号に応じて起動されるべき所定送受信ユニット18の数(ここでは、送受信ユニット18C及び18Dの2つ)である。
【0044】
ステップS108でカウントされた起動ユニット数が上記所望起動ユニット数と等しくない場合(ステップS109;No)、LF信号送信制御部214は、ステップS106でカウントされるLF信号の送信回数Nが所定回数以上であるか否かを判定する(ステップS110)。
【0045】
送信回数Nが所定回数以上である場合(ステップS110;Yes)、LF信号送信制御部214は、送信アンテナ17BからのLF信号の送信周期を変更する(ステップS111)。起動ユニット数と所望起動ユニット数とが等しくないということは、LF信号の送信時(周期又は送信タイミング)に、車輪12C及び12Dの回転角(例えば、図6の位置A)が当該LF信号を受信し難い位置に来ていると考えられる。このため、LF信号送信制御部214は、LF信号の送信タイミングを所定時間遅らせる又は早くするような送信周期に変更することによって、LF信号の送信周期と、当該LF信号を受信し難い車輪12C及び12Dの回転角が同期するのを防止する。
【0046】
一方、送信回数Nが所定回数未満である場合(ステップS110;No)、LF信号送信制御部214は、上記起動ユニット数が上記所望起動ユニット数よりも大きいか否かを判定する(ステップS112)。
【0047】
上記起動ユニット数が上記所望起動ユニット数よりも小さい場合(ステップS112;No)、LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力レベルを所定レベル増加させる(ステップS113)。例えば、図3に示すように、1回目のLF信号に応じた起動ユニット数「1」は所望起動ユニット数「2」よりも小さいので、図5Bに示すように、送信アンテナ17BからのLF信号が送受信ユニット18Dで受信されたが送受信ユニット18Cで受信されていないことが想定される。このため、LF信号送信制御部214は、送信アンテナ17BからのLF信号が所望の送受信ユニット18C及び18Dの双方に到達するように、LF信号の出力レベルを所定レベル増加させる。
【0048】
一方、上記起動ユニット数が上記所望起動ユニット数よりも大きい場合(ステップS112;Yes)、LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力レベルを所定レベル低下させる(ステップS114)。かかる場合、例えば、図5Cに示すように、所望の送受信ユニット18C及び18D以外の送受信ユニット18Bでも、送信アンテナ17BからのLF信号が受信されていることが想定される。このため、LF信号送信制御部214は、送信アンテナ17BからのLF信号が所望の送受信ユニット18C及び18D以外の送受信ユニット18Bに到達しないように、LF信号の出力レベルを所定レベル低下させる。
【0049】
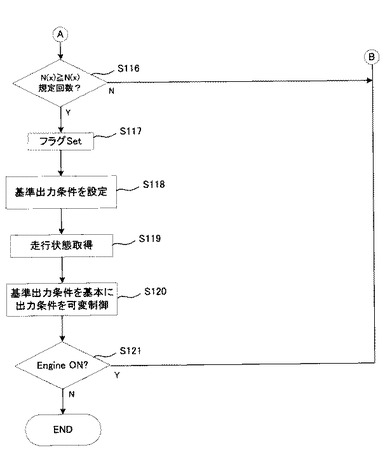
また、ステップS108でカウントされた起動ユニット数が上記所望起動ユニット数と等しい場合(ステップS109;Yes)、LF信号送信制御部214は、上記起動成功回数N(x)に「1」を加算する(ステップS115)。LF信号送信制御部214は、ステップS115で「1」加算された起動成功回数N(x)が所定回数以上であるか否かを判定する(ステップS116)。
【0050】
LF信号送信制御部214は、上記起動成功回数が所定回数以上である場合(ステップS116;Yes)、LF信号送信制御部214は、フラグをONに設定する(ステップS117)。ここでは、LF信号送信制御部214は、送信アンテナ17BからのLF信号の受信対象となる所望の送受信ユニット18C及び18Dが車輪12C及び12Dに取り付けられていることを確定する。例えば、図3においては、起動成功回数が所定回数(例えば、3)を超えた場合、すなわち、5回目のLF信号が送信アンテナ17Bから送信された場合において、送信アンテナ17Bについての車輪確定が完了する。
【0051】
LF信号送信制御部214は、記憶部216を参照し、起動ユニット数が所望起動ユニット数となったLF信号の送信時における出力レベルと、確定された車輪12C及び12Dの回転角及び舵角と、車両10の走行速度との少なくとも1つに基づいて、LF信号の基準出力条件を設定する(ステップS118)。例えば、図3においては、3〜5回目のLF信号に応じた起動ユニット数が所望起動ユニット数(=2)と等しいので、3〜5回目のLF信号の出力レベルと、車輪12C及び12Dの回転角及び舵角と、車両10の走行速度との少なくとも1つに基づいて、送信アンテナ17BからのLF信号の基準出力条件を設定する。
【0052】
LF信号送信制御部214は、回転角取得部211、操舵角取得部212、走行速度取得部213において、所定周期で取得される回転角、操舵角、走行速度の変化に基づいて、LF信号の出力条件を基準出力条件から可変制御する(ステップS119、S120)。
【0053】
本実施の形態に係るタイヤ状態監視装置によれば、車両走行開始後に、送信アンテナ17から送信したLF信号で各送受信ユニット18の起動を試み、各送受信ユニット18の起動成功時の走行状態情報に関連付けてLF信号の出力条件を決定し、現在の走行状態に対応して当該LF信号の出力条件を制御する。このため、車両10の走行状態が変化しても、送信アンテナ17から出力条件下で送信されるLF信号により、確実に所望の送受信ユニット18を起動でき、LF信号の再送によりタイヤ状態情報の取得までに長時間を費やし、消費電力が増大する不都合を防止できる。
【0054】
本実施の形態に係るタイヤ状態監視装置によれば、LF信号に応じた起動ユニット数と走行状態情報との対応関係から、起動ユニット数が所望起動ユニット数となる走行状態情報を特定し、特定した走行状態情報に基づいて、送信アンテナ17からのLF信号の出力条件を決定するので、基準となるLF信号の出力条件をより適切に決定することができる。
【0055】
なお、本発明は上記実施の形態に限定されず、種々変更して実施することができる。上記実施の形態における各構成要素の配置、大きさなどは適宜変更して実施することが可能である。その他、本発明は、本発明の範囲を逸脱しないで適宜変更して実施することができる。
【符号の説明】
【0056】
10…車両
11…車体
12…車輪
12A…右前輪
12B…右後輪
12C…左前輪
12D…左後輪
13…BCM
14、14A〜14D…ABSセンサ
15…舵角センサ
16…速度センサ
17、17A〜17C…送信アンテナ
18、18A〜18D…送受信ユニット
19…受信機
20…チューナー
21…コントローラ
211…回転角取得部
212…操舵角取得部
213…走行速度取得部
214…LF信号送信制御部
215…RF信号取得部
216…記憶部
A、B…位置
ANT…送信アンテナ
【技術分野】
【0001】
本発明は、車体に設けられた車体側装置と、車両の各車輪に取り付けられた送受信ユニットとの間で無線通信して、各送受信ユニットが取り付けられた各車輪のタイヤ状態情報を取得するタイヤ状態監視装置に関する。
【背景技術】
【0002】
従来、車体に装着されたタイヤの空気圧や温度等のタイヤ状態を監視するTPMS(Tire Pressure Monitoring System)が知られている(例えば、特許文献1)。TPMSでは、各車輪にタイヤ状態を検出するセンシング機能と無線通信機能を備えた送受信ユニットが直接取り付けられ、車体側に送受信ユニットとの間で無線通信する車体側装置が備えられる。車体側装置は、各車輪の送受信ユニットを起動するための信号(第1の信号)を送信する送信アンテナと、起動された送受信ユニットから送信される信号(第2の信号)を受信する受信機と、受信機で受信された信号に含まれるタイヤ状態情報からタイヤ状態を監視するコントローラとが設けられる。
【0003】
かかるTPMSにおいて、車体側装置の送信アンテナから送受信ユニットを起動するための第1の信号を所定タイミングで送信して送受信ユニットを周期的に起動し、起動した送受信ユニットからタイヤ状態情報を含む第2の信号を受信してタイヤ状態を監視する。送受信ユニットを車体側装置からのトリガ(第1の信号)によって起動することで、送受信ユニットの電力消費を低減することができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−149832号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車輪に直接取り付けられる送受信ユニットは、車両の走行中に車輪の回転角や舵角が変化するので、車体側装置の送信アンテナとの位置関係が大きく変化する。このため、車輪の回転角や舵角によっては、車輪側の送受信ユニットが車体側装置の送信アンテナから送信される起動のための第1の信号を受信できない場合がある。例えば、図6に示すように、送受信ユニットと車体側に取り付けられた送信アンテナANTとの間にホイール等の金属物が介在することとなる位置Aに送受信ユニットが来たときには、ホイール等が両者間の無線通信の障害となって、送受信ユニットを起動できない現象が生じる。
【0006】
このように、従来のTPMSにおいては、車輪の回転角や舵角などの車両の走行状態によっては、当該車輪に取り付けられた送受信ユニットが送信アンテナからの第1の信号を受信できずに起動できない場合がある。かかる場合、当該送信アンテナは、第1の信号の再送を繰返すことから、消費電力が増大するという問題点があった。
【0007】
本発明はかかる点に鑑みてなされたものであり、車輪に取り付けられた送受信ユニットを確実に起動でき、送受信ユニットを起動させるための第1の信号の再送の繰り返しを防止して消費電力を抑制できるタイヤ状態監視装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のタイヤ状態監視装置は、車両の各車輪に取り付けられた送受信ユニットと、前記各車輪が装着された車体に設けられ前記各送受信ユニットとの間で無線通信して前記各車輪のタイヤ状態情報を取得する車体側装置と、を備えたタイヤ状態監視装置であって、前記車体側装置は、それぞれ割り当てられた所定範囲に対して、前記送受信ユニットを起動するための第1の信号を送信する複数の送信アンテナと、前記第1の信号によって起動された前記送受信ユニットが送信する第2の信号を受信する受信機と、前記車両走行開始後に、前記各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部と、を具備することを特徴とする。
【0009】
この構成によれば、車両走行開始後に、送信アンテナから送信した第1の信号で各送受信ユニットの起動を試み、各送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して当該第1の信号の出力条件を制御する。このため、車両の走行状態が変化しても、送信アンテナから出力条件下で送信される第1の信号により、確実に所望の送受信ユニットを起動でき、第1の信号の再送により消費電力が増大するのを防止できる。
【0010】
上記タイヤ状態監視装置において、前記車体側装置は、前記送信アンテナから第1の信号送信時における前記車両の走行状態を示す走行状態情報と、当該第1の信号によって起動された送受信ユニットからの第2の信号の受信数で示される起動成功実績とを関連付けて記憶する記憶部を更に具備し、前記送信制御部は、前記記憶部に記憶された第2の信号の受信数と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、前記第1の信号の出力条件を決定してもよい。
【0011】
この構成によれば、第1の信号に応じた起動成功実績と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、送信アンテナからの第1の信号の出力条件を決定するので、基準となる第1の信号の出力条件をより適切に決定することができる。
【0012】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の回転角を検出する回転角取得部から回転角情報を取得し、取得された回転角情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0013】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の操舵角を検出する操舵角取得部から操舵角情報を取得し、取得された操舵角情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0014】
上記タイヤ状態監視装置において、前記送信制御部は、前記車両の走行状態情報として、前記車両の走行速度を検出する走行速度取得部から速度情報を取得し、取得された速度情報に基づいて、前記第1の信号の出力条件を制御してもよい。
【0015】
上記タイヤ状態監視装置において、前記送信アンテナは、前記車体の右側に配置された右側送信アンテナと、前記車体の左側に配置された左側送信アンテナ、前記車体の後側に配置された後側送信アンテナと、を含み、前記送信制御部は、前記右側送信アンテナからの第1の信号が右前後輪に取り付けられた送受信ユニットで受信され、前記左側送信アンテナからの第1の信号が左前後輪に取り付けられた送受信ユニットで受信され、前記後側送信アンテナからの第1の信号が左右後輪に取り付けられた送受信ユニットで受信されるように、前記右側送信アンテナ、前記左側送信アンテナ及び前記後側送信アンテナから送信される第1の信号の出力条件を制御してもよい。
【0016】
上記タイヤ状態監視装置において、前記送信制御部は、前記出力条件として、第1の信号の出力レベルと出力タイミングを含んでもよい。
【0017】
上記タイヤ状態監視装置において、前記第1の信号は、無線通信可能範囲が車両近傍に制限される第1の周波数に設定され、前記第2の信号は、無線通信可能範囲が前記第1の信号よりも広く、第1の周波数よりも高い第2の周波数に設定されてもよい。
【発明の効果】
【0018】
本発明によれば、車輪に取り付けられた送受信ユニットを確実に起動でき、送受信ユニットを起動させるための第1の信号の再送の繰り返しを防止して消費電力を抑制できる。
【図面の簡単な説明】
【0019】
【図1】本実施の形態に係るタイヤ状態監視装置の全体構成図である。
【図2】本実施の形態に係るタイヤ状態監視装置の詳細機能構成図である。
【図3】本実施の形態に係る記憶部の記憶内容を説明するための図である。
【図4A】本実施の形態に係るタイヤ状態監視装置の動作の一部を示すフローチャートである。
【図4B】本実施の形態に係るタイヤ状態監視装置の動作の他の一部を示すフローチャートである。
【図5】本実施の形態に係るLF信号の送信レベルの制御について説明するための図である。
【図6】従来のタイヤ状態監視装置を説明するための図である。
【発明を実施するための形態】
【0020】
以下、本実施の形態に係るタイヤ状態監視装置について、図面を参照して詳述する。
【0021】
図1は、本実施の形態のタイヤ状態監視装置の全体構成図である。本実施の形態のタイヤ状態監視装置が、4輪の車両10に対して適用された構成を示している。車両10は、車体11と、車体11に取り付けられた4つの車輪12A〜12Dとを備えている。車体11の前方(図1の矢印FR方向)の左右に取り付けられた車輪を左前輪12C、右前輪12Aと呼称し、車体11の後方(図1の矢印FRと反対の矢印BKの方向)の左右に取り付けられた車輪を及び左後輪12D、右後輪12Bと呼称することとする。4つの車輪12A〜12Dを区別しない場合は、必要に応じて「車輪12」と総称する。車体11には、車両10に設けられた各種センサから車両走行状態を示す指標となる各種センシング結果が伝送されるBCM(Body Control Module)13が設けられている。車両10の走行状態を検出する各種センサとして、ABSセンサ14A〜14D(以下、必要に応じて「ABSセンサ14」と総称する)、舵角センサ15、速度センサ16が挙げられる。ABSセンサ14は、車輪12の回転角を検出する。車輪12の回転角とは、車体11に装着された車輪12の車軸に対する回転角である。舵角センサ15は、各車輪12の操舵角を検出する。速度センサ16は、車両10の走行速度を検出する。
【0022】
タイヤ状態監視装置は、第1の信号としてLF信号を送信する送信アンテナ17A〜17C(以下、必要に応じて「送信アンテナ17」と総称する)と、車輪12のタイヤ状態情報を含む第2の信号としてRF信号を送信する送受信ユニット18A〜18D(以下、必要に応じて「送受信ユニット18」と総称する)とを備える。また、タイヤ状態監視装置は、送受信ユニット18から送信されたRF信号を受信する受信機19と、受信機19で受信されたRF信号の復調処理等を行うチューナー20と、チューナー20で復調されたRF信号からタイヤ状態情報を取り込むと共に送信アンテナ17から送信されるLF信号の出力条件を制御するコントローラ21とを備える。
【0023】
車体11に設けられた送信アンテナ17A〜17C、受信機19、チューナー20及びコントローラ21から車体側装置が構成される。
【0024】
送信アンテナ17A、17B、17Cは、それぞれ、車体11の右側中央部分、左側中央部分、後側中央部分に配置される。送信アンテナ17Aは、車両右側の所定範囲に配置される右前輪12A及び右後輪12Bに取り付けられた送受信ユニット18A及び18Bを起動対象ユニットとして予め割り当てられている。また、送信アンテナ17Bは、車両左側の所定範囲に配置される左前輪12C及び左後輪12Dに取り付けられた送受信ユニット18C及び18Dを起動対象ユニットとして予め割り当てられている。また、送信アンテナ17Cは、車両後方の所定範囲に配置される右後輪12B及び左後輪12Dに取り付けられた送受信ユニット18A及び18Bを起動対象ユニットとして予め割り当てられている。なお、送信アンテナ17の数は、送信アンテナ17A、17B、17Cの3つに限られるものではない。また、送信アンテナ17の配置についても、図1に示す配置に限られるものではない。
【0025】
送受信ユニット18A〜18Dは、それぞれ対応する右前輪12A、右後輪12B、左前輪12C、左後輪12Dに取り付けられている。車輪12A〜12Dはそれぞれタイヤおよびホイールを有する。ホイールの外周部には円筒状に形成されたホイールリムが設けられ、このホイールリムの外周上にタイヤが組み付けられる。こうしてタイヤ内部とホイールリム外周によって囲われる領域にタイヤ気室が形成される。送受信ユニット18は、例えば、車輪12のタイヤバルブなどに設けられ、タイヤバルブがホイールのホイールリムに固定されることにより車輪12に取り付けられる。送受信ユニット18は、LF信号を受信すると共にRF信号を送信する無線部と、ICなどで構成される本体部と、タイヤ内の空気圧を検出する圧力センサ、タイヤ気室内温度を検出する温度センサ等のセンサ部と、電源部とを有する。送受信ユニット18が受信したLF信号で本体部が起動して車体側装置との無線通信を開始し、センサ部で検出されるタイヤ状態情報をRF信号で通知し、所定手順を実行した後に再び消費電力を抑制した待機状態に移行する。なお、受信したLF信号で直接発振器を励振させてRF信号を送信する構造であれば電源部は不要である。
【0026】
コントローラ21は、CPUを含むマイクロプロセッサとして構成されており、マイクロコンピュータによる演算を行う演算ユニット、各種の処理プログラムを記憶するROM、一時的にデータやプログラムを記憶してデータ格納やプログラム実行のためのワークエリアとして利用されるRAM、および各種信号の送受信を行うための入出力ポート等を有する。コントローラ21は、ABSセンサ14、舵角センサ15、速度センサ16で検出される検出結果がBCM13を介して入力されると共に、受信機19及びチューナー20で受信されるRF信号が入力される。また、コントローラ21は、各送信アンテナ17に接続され、各送信アンテナ17からのLF信号が起動対象の送受信ユニット18で受信されるように、車両10の走行状態に基づいて、送信アンテナ17からのLF信号の出力条件を制御する。車両10の走行状態としては、例えば、ABSセンサ14で検出される車輪12の回転角、舵角センサ15で検出される操舵角、速度センサ16で検出される車両の走行速度などがあげられる。また、LF信号の出力条件には、送信アンテナ17に割り当てられた起動対象ユニットだけを確実に起動できるLF信号の出力レベルと、起動対象ユニットを確実に起動できる出力タイミングとが含まれる。
【0027】
本実施の形態においては、上記した通り、送受信ユニット18を起動させる第1の信号としてLF信号を用い、タイヤ状態情報を伝達するための第2の信号としてRF信号を用いる。LF信号は、車両右側(右前輪12A、右後輪12B)に配置される送受信ユニット18A,18B、車両左側(左前輪12C、左後輪12D)に配置される送受信ユニット18C,18D、車両後側(右後輪12B、左後輪12D)に配置される送受信ユニット18B,18D、といった具合に、1つのLF信号で起動できる起動可能範囲を区分けできる通信距離であることが望ましい。このため、LF信号は、RF信号よりも通信距離が短く、最大送信レベルであっても車両から大きく離れないような近傍エリアまでを起動可能範囲とする周波数であることが望ましい。例えば、LF信号は30KHz〜300KHz程度の低周波数帯域とすることができ、本例では125KHzを用いるものとする。一方、RF信号は、どの送受信ユニット18から送信されたかを識別できるのであれば、1台の受信機19で全ての送受信ユニット18からのRF信号を受信する構成が望ましい。このため、RF信号は、いずれの送受信ユニット18からでも受信機19で受信可能な通信距離を確保することが望ましく、本例では330Mhz程度の高周波数域を用いる。第1の信号としてLF信号を用いることにより、各送信アンテナ17に割り当てられた所定の送受信ユニット18だけを起動させることができ、第2の信号としてRF信号を用いることにより、1台の受信機19で全ての送受信ユニット18からのRF信号を受信してタイヤ状態情報を確実に収集することができる。
【0028】
また、車体11には、エンジンのON/OFFを切り替えるイグニッションスイッチ(不図示)が設けられてもよい。
【0029】
図2は、本実施の形態に係るタイヤ状態監視装置の詳細機能構成図である。図2に示すように、コントローラ21は、ABSセンサ14で検出された車輪12の回転角を取得する回転角取得部211と、舵角センサ15で検出された車輪12の操舵角を取得する操舵角取得部212と、速度センサ16で検出された車両10の走行速度を取得する走行速度取得部213と、送信アンテナ17から送信されるLF信号の出力条件を制御するLF信号送信制御部214と、LF信号で起動された送受信ユニット18から送信され受信機19で受信されたRF信号を取得するRF信号取得部215と、車両10の走行状態情報及びLF信号による起動成功実績情報が記憶される記憶部216と、を具備する。
【0030】
LF信号送信制御部214は、各送受信ユニット18の起動成功実績となる起動ユニット数と車両10の走行状態情報を収集し、送信アンテナ17毎に所定送受信ユニット18の起動成功時の走行状態情報に関連付けてLF信号の出力条件を決定し、現在の走行状態に対応してLF信号の出力条件を制御する。
【0031】
具体的には、LF信号送信制御部214は、LF信号の送信時における車両10の走行状態情報と、LF信号によって起動された送受信ユニット18の数を示す起動ユニット数とを関連付けて記憶部216に記憶させる。なお、LF信号の送信時とは、LF信号の厳密な送信周期のみを示すものではなく、LF信号の送信周期前後の所定の時間幅を有してもよい。LF信号送信制御部214は、記憶部216において記憶された起動ユニット数が所望起動ユニット数となっているLF信号送信時における走行状態情報に基づいて、送信アンテナ毎にLF信号の出力条件を制御する。起動ユニット数とは、送信アンテナ17からのLF信号によって起動された送受信ユニット18の数であるが、送受信ユニット18から第2の信号として送信されたRF信号の受信数としてカウントされる。また、所望起動ユニット数とは、送信アンテナ17毎に予め割り当てられた起動対象送受信ユニット18の数(ここでは、2)である。起動ユニット数と所望起動ユニット数が等しい場合に、起動対象の送受信ユニット18のみが起動されていると判断することができる。
【0032】
図3は、本実施の形態に係る記憶部216の記憶内容の一例を示す図である。図3に示すように、記憶部216は、送信アンテナ17から第1の信号として送信されたLF信号の送信回数と、各送信回でのLF信号の出力レベル、起動対象の送受信ユニット18(送信アンテナ17に割り当てられた送受信ユニット18)が取り付けられた車輪12の当該LF信号送信時の回転角、舵角、当該LF信号送信時における車両10の走行速度と、当該LF信号によって現実に起動された送受信ユニット18の起動ユニット数と、を関連付けて記憶する。
【0033】
例えば、図3においては、3〜5回目のLF信号の送信時において、起動ユニット数が所望起動ユニット数(ここでは、2とする)と等しくなるので、当該送信アンテナ17に予め割り当てられた所定送受信ユニット18のみの起動に成功したことになる。そこで、LF信号送信制御部214は、起動成功時の走行状態情報(すなわち、3〜5回目のLF信号の送信時におけるLF信号の出力レベル、回転角、舵角、速度の分布)に基づいて、LF信号の出力条件を決定し、決定された出力条件でLF信号を送信するように送信アンテナ17を制御する。なお、LF信号送信制御部214は、上記出力条件の設定を所定周期で行ってもよい。
【0034】
また、LF信号送信制御部214は、回転角取得部211、操舵角取得部212及び走行速度取得部213で取得される回転角、操舵角、走行速度の変化に基づいて、LF信号の出力条件を適宜制御する。例えば、LF信号送信制御部214は、上記図3において取得した条件(ユニット起動時の車輪角)に合わせてLF信号を送信することで所望数以外のユニットが起動するLF送信回数の削減に寄与する。
【0035】
次に、以上のように構成されたタイヤ状態監視装置の動作について説明する。図4A、Bは、本実施の形態に係るタイヤ状態監視装置の動作を示すフローチャートである。また、図5は、送信アンテナ17からのLF信号の送信範囲を示す図である。
【0036】
以下では、一例として、図5Aに示すように、送信アンテナ17BからのLF信号が割り当てられている2つの送受信ユニット18C及び18Dのみを起動するように、当該LF信号の出力条件を設定する動作を説明する。なお、図4に示す動作は、所望の送受信ユニット18A及び18Bに受信されるように送信アンテナ17AからのLF信号の出力条件を設定する場合、或いは、所望の送受信ユニット18B及び18Dに受信されるように送信アンテナ17CからのLF信号の出力条件を設定する場合にも適用可能である。
【0037】
図4に示すように、コントローラ21は、車両10のエンジンが起動されたことを検出する(ステップS101)。コントローラ21のLF信号送信制御部214は、車輪確定フラグを初期化する(ステップS102)。ここで、フラグとは、前回EngineON時のタイヤ空気圧が規定内又は規定外であることを記憶してあるフラグである。
【0038】
LF信号送信制御部214は、送信回数Nと起動成功回数N(x)とを「0回」に初期化する(ステップS103)。ここで、送信回数Nとは、送信アンテナ17BからのLF信号の送信回数である。また、起動成功回数N(x)とは、送信アンテナ17BからのLF信号によって所望数(例えば、2)の送受信ユニット18が起動された回数である。
【0039】
LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力条件を初期値に設定する(ステップS104)。上述のように、LF信号の出力条件には、LF信号の出力レベルと出力タイミングが含まれる。
【0040】
送信アンテナ17Bは、LF信号送信制御部214によって初期値に設定された出力条件でLF信号を送信する(ステップS105)。LF信号送信制御部214は、送信アンテナ17BからLF信号が送信された後、上述の送信回数Nに「1」を加算する(ステップS106)。
【0041】
LF信号送信制御部214は、送信アンテナ17BによるLF信号送信時における当該LF信号の出力レベルと、車輪12A〜12Dの回転角及び舵角と、車両10の走行速度とを、送信回数Nに関連付けて、記憶部216に記憶させる(ステップS107)。例えば、1回目のLF信号が送信された場合、LF信号送信制御部214は、図3に示すように、送信回数N「1」に関連付けて、1回目のLF信号の出力レベルa1、当該LF信号の送信時において、回転角取得部211で取得された車輪12A〜12Dの回転角b1、操舵角取得部212で取得された車輪12A〜12Dの舵角c1、走行速度取得部213によって取得された走行速度d1を、記憶部216に記憶させる。
【0042】
LF信号送信制御部214は、ステップS105で送信アンテナ17BからLF信号を送信した後の所定期間内に、受信機19(RF信号取得部215)で受信されたRF信号の数(以下、起動ユニット数という)をカウントし、記憶部216に記憶させる(ステップS108)。例えば、1回目のLF信号が送信された場合、LF信号送信制御部214は、図3に示すように、送信回数N「1」に関連付けて、当該LF信号に応じて受信されたRF信号の数(ここでは、1)を、記憶部216に記憶させる。
【0043】
LF信号送信制御部214は、ステップS108でカウントされた起動ユニット数が所望起動ユニット数と等しいか否かを判定する(ステップS109)。上述のように、所望起動ユニット数とは、送信アンテナ17BからのLF信号に応じて起動されるべき所定送受信ユニット18の数(ここでは、送受信ユニット18C及び18Dの2つ)である。
【0044】
ステップS108でカウントされた起動ユニット数が上記所望起動ユニット数と等しくない場合(ステップS109;No)、LF信号送信制御部214は、ステップS106でカウントされるLF信号の送信回数Nが所定回数以上であるか否かを判定する(ステップS110)。
【0045】
送信回数Nが所定回数以上である場合(ステップS110;Yes)、LF信号送信制御部214は、送信アンテナ17BからのLF信号の送信周期を変更する(ステップS111)。起動ユニット数と所望起動ユニット数とが等しくないということは、LF信号の送信時(周期又は送信タイミング)に、車輪12C及び12Dの回転角(例えば、図6の位置A)が当該LF信号を受信し難い位置に来ていると考えられる。このため、LF信号送信制御部214は、LF信号の送信タイミングを所定時間遅らせる又は早くするような送信周期に変更することによって、LF信号の送信周期と、当該LF信号を受信し難い車輪12C及び12Dの回転角が同期するのを防止する。
【0046】
一方、送信回数Nが所定回数未満である場合(ステップS110;No)、LF信号送信制御部214は、上記起動ユニット数が上記所望起動ユニット数よりも大きいか否かを判定する(ステップS112)。
【0047】
上記起動ユニット数が上記所望起動ユニット数よりも小さい場合(ステップS112;No)、LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力レベルを所定レベル増加させる(ステップS113)。例えば、図3に示すように、1回目のLF信号に応じた起動ユニット数「1」は所望起動ユニット数「2」よりも小さいので、図5Bに示すように、送信アンテナ17BからのLF信号が送受信ユニット18Dで受信されたが送受信ユニット18Cで受信されていないことが想定される。このため、LF信号送信制御部214は、送信アンテナ17BからのLF信号が所望の送受信ユニット18C及び18Dの双方に到達するように、LF信号の出力レベルを所定レベル増加させる。
【0048】
一方、上記起動ユニット数が上記所望起動ユニット数よりも大きい場合(ステップS112;Yes)、LF信号送信制御部214は、送信アンテナ17Bから送信されるLF信号の出力レベルを所定レベル低下させる(ステップS114)。かかる場合、例えば、図5Cに示すように、所望の送受信ユニット18C及び18D以外の送受信ユニット18Bでも、送信アンテナ17BからのLF信号が受信されていることが想定される。このため、LF信号送信制御部214は、送信アンテナ17BからのLF信号が所望の送受信ユニット18C及び18D以外の送受信ユニット18Bに到達しないように、LF信号の出力レベルを所定レベル低下させる。
【0049】
また、ステップS108でカウントされた起動ユニット数が上記所望起動ユニット数と等しい場合(ステップS109;Yes)、LF信号送信制御部214は、上記起動成功回数N(x)に「1」を加算する(ステップS115)。LF信号送信制御部214は、ステップS115で「1」加算された起動成功回数N(x)が所定回数以上であるか否かを判定する(ステップS116)。
【0050】
LF信号送信制御部214は、上記起動成功回数が所定回数以上である場合(ステップS116;Yes)、LF信号送信制御部214は、フラグをONに設定する(ステップS117)。ここでは、LF信号送信制御部214は、送信アンテナ17BからのLF信号の受信対象となる所望の送受信ユニット18C及び18Dが車輪12C及び12Dに取り付けられていることを確定する。例えば、図3においては、起動成功回数が所定回数(例えば、3)を超えた場合、すなわち、5回目のLF信号が送信アンテナ17Bから送信された場合において、送信アンテナ17Bについての車輪確定が完了する。
【0051】
LF信号送信制御部214は、記憶部216を参照し、起動ユニット数が所望起動ユニット数となったLF信号の送信時における出力レベルと、確定された車輪12C及び12Dの回転角及び舵角と、車両10の走行速度との少なくとも1つに基づいて、LF信号の基準出力条件を設定する(ステップS118)。例えば、図3においては、3〜5回目のLF信号に応じた起動ユニット数が所望起動ユニット数(=2)と等しいので、3〜5回目のLF信号の出力レベルと、車輪12C及び12Dの回転角及び舵角と、車両10の走行速度との少なくとも1つに基づいて、送信アンテナ17BからのLF信号の基準出力条件を設定する。
【0052】
LF信号送信制御部214は、回転角取得部211、操舵角取得部212、走行速度取得部213において、所定周期で取得される回転角、操舵角、走行速度の変化に基づいて、LF信号の出力条件を基準出力条件から可変制御する(ステップS119、S120)。
【0053】
本実施の形態に係るタイヤ状態監視装置によれば、車両走行開始後に、送信アンテナ17から送信したLF信号で各送受信ユニット18の起動を試み、各送受信ユニット18の起動成功時の走行状態情報に関連付けてLF信号の出力条件を決定し、現在の走行状態に対応して当該LF信号の出力条件を制御する。このため、車両10の走行状態が変化しても、送信アンテナ17から出力条件下で送信されるLF信号により、確実に所望の送受信ユニット18を起動でき、LF信号の再送によりタイヤ状態情報の取得までに長時間を費やし、消費電力が増大する不都合を防止できる。
【0054】
本実施の形態に係るタイヤ状態監視装置によれば、LF信号に応じた起動ユニット数と走行状態情報との対応関係から、起動ユニット数が所望起動ユニット数となる走行状態情報を特定し、特定した走行状態情報に基づいて、送信アンテナ17からのLF信号の出力条件を決定するので、基準となるLF信号の出力条件をより適切に決定することができる。
【0055】
なお、本発明は上記実施の形態に限定されず、種々変更して実施することができる。上記実施の形態における各構成要素の配置、大きさなどは適宜変更して実施することが可能である。その他、本発明は、本発明の範囲を逸脱しないで適宜変更して実施することができる。
【符号の説明】
【0056】
10…車両
11…車体
12…車輪
12A…右前輪
12B…右後輪
12C…左前輪
12D…左後輪
13…BCM
14、14A〜14D…ABSセンサ
15…舵角センサ
16…速度センサ
17、17A〜17C…送信アンテナ
18、18A〜18D…送受信ユニット
19…受信機
20…チューナー
21…コントローラ
211…回転角取得部
212…操舵角取得部
213…走行速度取得部
214…LF信号送信制御部
215…RF信号取得部
216…記憶部
A、B…位置
ANT…送信アンテナ
【特許請求の範囲】
【請求項1】
車両の各車輪に取り付けられた送受信ユニットと、前記各車輪が装着された車体に設けられ前記各送受信ユニットとの間で無線通信して前記各車輪のタイヤ状態情報を取得する車体側装置と、を備えたタイヤ状態監視装置であって、
前記車体側装置は、
それぞれ割り当てられた所定範囲に対して、前記送受信ユニットを起動するための第1の信号を送信する複数の送信アンテナと、
前記第1の信号によって起動された前記送受信ユニットが送信する第2の信号を受信する受信機と、
前記車両走行開始後に、前記各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部と、
を具備することを特徴とするタイヤ状態監視装置。
【請求項2】
前記車体側装置は、前記送信アンテナから第1の信号の送信時における前記車両の走行状態を示す走行状態情報と、当該第1の信号によって起動された送受信ユニットからの第2の信号の受信数で示される起動成功実績とを関連付けて記憶する記憶部を更に具備し、
前記送信制御部は、前記記憶部に記憶された第2の信号の受信数と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、前記第1の信号の出力条件を決定することを特徴とする請求項1に記載のタイヤ状態監視装置。
【請求項3】
前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の回転角を検出する回転角取得部から回転角情報を取得し、取得された回転角情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1又は請求項2に記載のタイヤ状態監視装置。
【請求項4】
前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の操舵角を検出する操舵角取得部から操舵角情報を取得し、取得された操舵角情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1から請求項3のいずれかに記載のタイヤ状態監視装置。
【請求項5】
前記送信制御部は、前記車両の走行状態情報として、前記車両の走行速度を検出する走行速度取得部から速度情報を取得し、取得された速度情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1から請求項4のいずれかに記載のタイヤ状態監視装置。
【請求項6】
前記送信アンテナは、前記車体の右側に配置された右側送信アンテナと、前記車体の左側に配置された左側送信アンテナ、前記車体の後側に配置された後側送信アンテナと、を含み、
前記送信制御部は、前記右側送信アンテナからの第1の信号が右前後輪にそれぞれ取り付けられた送受信ユニットで受信され、前記左側送信アンテナからの第1の信号が左前後輪にそれぞれ取り付けられた送受信ユニットで受信され、前記後側送信アンテナからの第1の信号が左右後輪にそれぞれ取り付けられた送受信ユニットで受信されるように、前記右側送信アンテナ、前記左側送信アンテナ及び前記後側送信アンテナから送信される第1の信号の出力条件を制御することを特徴とする請求項1から請求項5のいずれかに記載のタイヤ状態監視装置。
【請求項7】
前記送信制御部は、前記出力条件として、第1の信号の出力レベルと出力タイミングを含むことを特徴とする請求項1から請求項6のいずれかに記載のタイヤ状態監視装置。
【請求項8】
前記第1の信号は、無線通信可能範囲が車両近傍に制限される第1の周波数に設定され、
前記第2の信号は、無線通信可能範囲が前記第1の信号よりも広く、第1の周波数よりも高い第2の周波数に設定されたことを特徴とする請求項1から請求項7のいずれかに記載のタイヤ状態監視装置。
【請求項1】
車両の各車輪に取り付けられた送受信ユニットと、前記各車輪が装着された車体に設けられ前記各送受信ユニットとの間で無線通信して前記各車輪のタイヤ状態情報を取得する車体側装置と、を備えたタイヤ状態監視装置であって、
前記車体側装置は、
それぞれ割り当てられた所定範囲に対して、前記送受信ユニットを起動するための第1の信号を送信する複数の送信アンテナと、
前記第1の信号によって起動された前記送受信ユニットが送信する第2の信号を受信する受信機と、
前記車両走行開始後に、前記各送受信ユニットの起動成功実績と走行状態情報とを収集し、送信アンテナ毎に所定送受信ユニットの起動成功時の走行状態情報に関連付けて第1の信号の出力条件を決定し、現在の走行状態に対応して第1の信号の出力条件を制御する送信制御部と、
を具備することを特徴とするタイヤ状態監視装置。
【請求項2】
前記車体側装置は、前記送信アンテナから第1の信号の送信時における前記車両の走行状態を示す走行状態情報と、当該第1の信号によって起動された送受信ユニットからの第2の信号の受信数で示される起動成功実績とを関連付けて記憶する記憶部を更に具備し、
前記送信制御部は、前記記憶部に記憶された第2の信号の受信数と走行状態情報との対応関係から、第2の信号が所望の受信数となる走行状態情報を特定し、特定した走行状態情報に基づいて、前記第1の信号の出力条件を決定することを特徴とする請求項1に記載のタイヤ状態監視装置。
【請求項3】
前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の回転角を検出する回転角取得部から回転角情報を取得し、取得された回転角情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1又は請求項2に記載のタイヤ状態監視装置。
【請求項4】
前記送信制御部は、前記車両の走行状態情報として、前記各送受信ユニットが取り付けられた車輪の操舵角を検出する操舵角取得部から操舵角情報を取得し、取得された操舵角情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1から請求項3のいずれかに記載のタイヤ状態監視装置。
【請求項5】
前記送信制御部は、前記車両の走行状態情報として、前記車両の走行速度を検出する走行速度取得部から速度情報を取得し、取得された速度情報に基づいて、前記第1の信号の出力条件を制御することを特徴とする請求項1から請求項4のいずれかに記載のタイヤ状態監視装置。
【請求項6】
前記送信アンテナは、前記車体の右側に配置された右側送信アンテナと、前記車体の左側に配置された左側送信アンテナ、前記車体の後側に配置された後側送信アンテナと、を含み、
前記送信制御部は、前記右側送信アンテナからの第1の信号が右前後輪にそれぞれ取り付けられた送受信ユニットで受信され、前記左側送信アンテナからの第1の信号が左前後輪にそれぞれ取り付けられた送受信ユニットで受信され、前記後側送信アンテナからの第1の信号が左右後輪にそれぞれ取り付けられた送受信ユニットで受信されるように、前記右側送信アンテナ、前記左側送信アンテナ及び前記後側送信アンテナから送信される第1の信号の出力条件を制御することを特徴とする請求項1から請求項5のいずれかに記載のタイヤ状態監視装置。
【請求項7】
前記送信制御部は、前記出力条件として、第1の信号の出力レベルと出力タイミングを含むことを特徴とする請求項1から請求項6のいずれかに記載のタイヤ状態監視装置。
【請求項8】
前記第1の信号は、無線通信可能範囲が車両近傍に制限される第1の周波数に設定され、
前記第2の信号は、無線通信可能範囲が前記第1の信号よりも広く、第1の周波数よりも高い第2の周波数に設定されたことを特徴とする請求項1から請求項7のいずれかに記載のタイヤ状態監視装置。
【図1】


【図2】
【図3】
【図4A】

【図4B】
【図5】
【図6】

【図2】
【図3】
【図4A】
【図4B】
【図5】
【図6】
【公開番号】特開2013−56575(P2013−56575A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194792(P2011−194792)
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]