
自動分析装置及びモータの駆動制御装置

【課題】自動分析装置の立ち上げ時に、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能な自動分析装置、及び、ステッピングモータの駆動制御装置を提供する。
【解決手段】分注アームに連動するロータと、ステータと、ロータ又はステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、電流を供給する対象のコイルを切り換える駆動手段と、駆動手段を含む各構成要素に電流を供給する電源と、駆動手段に対して電源を投入した場合、複数のコイルのいずれに対しても電流の供給を停止させ、その後、予め定められた指示を受けた場合、複数のコイルに対し電流の供給を開始し、ロータを順次回転させる制御手段と、を有する。
【解決手段】分注アームに連動するロータと、ステータと、ロータ又はステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、電流を供給する対象のコイルを切り換える駆動手段と、駆動手段を含む各構成要素に電流を供給する電源と、駆動手段に対して電源を投入した場合、複数のコイルのいずれに対しても電流の供給を停止させ、その後、予め定められた指示を受けた場合、複数のコイルに対し電流の供給を開始し、ロータを順次回転させる制御手段と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、自動分析装置及びモータの駆動制御装置に関し、特に、試料及び試薬を反応容器にそれぞれ分注して反応溶液を生成し、該反応溶液の成分量を測定する自動分析装置及びモータの駆動制御装置に関する。
【背景技術】
【0002】
一般に、自動分析装置では、試料容器から反応容器へ試料(検体)を分注するとき又は試薬容器から反応容器に試薬を分注するときに、まず、試料容器の開口部の上方あるいは試薬容器の開口部の上方(吸引位置)に位置するように分注アームが回動し、分注アームの回動を終了すると、分注アームは降下して、分注プローブの先端が試料容器内の試料あるいは試薬容器内の試薬に浸かり、真空ポンプ等による吸引動作により試料あるいは試薬が分注プローブ内に吸引される。
【0003】
ここで、分注アームは上昇して分注プローブが試料容器あるいは試薬容器から抜き出されると、分注アームは、反応容器の開口部の上方(吐出位置)に分注プローブが位置するように回動し、この回動を終了すると分注アームは降下して、分注プローブの先端が反応容器内に入り、試料あるいは試薬を予め設定された量だけ反応容器内に吐出する。この吐出が終了すると、分注アームは上昇して、分注プローブが反応容器から抜け出す。
【0004】
分注プローブの先端は試料あるいは試薬に浸かるので、その分注プローブの先端部分には試料あるいは試薬が付着する。従って、分注プローブの先端が試料あるいは試薬に浸かった後、分注アームが上昇したとき又は回動したときには、分注アームの動作状態によって、分注プローブの先端に付着した試料あるいは試薬が飛散するおそれがある。このような分注プローブの先端に付着した試料あるいは試薬の飛散により、飛散した溶液が、他の反応容器、試料容器、試薬容器に混入するとコンタミネーション(汚染)が発生し、反応溶液の成分量を測定するときの精度が低下する。
【0005】
コンタミネーション(汚染)の発生を防止するため、試料あるいは試薬の吐出が終了し、分注プローブを反応容器から抜き出した後、分注プローブを洗浄位置に位置させるように、分注アームは回動し、分注プローブの洗浄後、分注プローブを待機位置に位置させるように、分注アームは回動し、次の試料あるいは試薬の分注に備える。以上により試料あるいは試薬の一連の分注動作を終了する。
【0006】
上記試料あるいは試薬の一連の分注動作において、分注アームを回動、上昇、及び、下降させるときの動力源としてステッピングモータを使用する自動分析装置がある(特許文献1)。
【0007】
ステッピングモータは、動作させる対象を制御するためのフィードバック信号を必要とせず、対象の位置決め誤差が累積しない等の利点がある。例えば、PM形ステッピングモータとしては、ロータと、ステータと、ロータに設けられた永久磁石と、ステータに設けられた複数のポールと、各ポールに巻かれて、供給される電流により励磁される複数のコイルとを有している。その中で2相のステッピングモータでは、ロータの回転方向に沿って、ポール1〜4が設けられ、ポール1とポール3に1本の電線であるコイルAが巻かれ、さらに、1本の電線であるコイルA’が巻かれている。コイルAとコイルA’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、ポール2とポール4に1本の電線であるコイルBが巻かれ、さらに、1本の電線であるコイルB’が巻かれている。コイルBとコイルB’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。コイルAに電流を供給したとき、ポール1、3がN極、S極となり、コイルA’に電流を供給したとき、ポール1、3がS極、N極となる。また、コイルBに電流を供給したとき、ポール2、4がN極、S極となり、コイルB’に電流を供給したとき、ポール2、4がS極、N極となる。
【0008】
このようなステッピングモータの駆動制御装置としては、電流を供給する対象のコイルを切り換える駆動手段(スイッチング回路)と、駆動手段に電流を供給する電源と、駆動手段を制御する制御手段とを有している。
【0009】
上記の2相のステッピングモータの各コイルを例えば1相励磁方式により励磁する場合、駆動手段が電流を供給する対象をコイルAに切り換えたとき、コイルAに生じた磁力により、ポール1がN極となり(ポール3がS極となり)、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルBに切り換えたとき、コイルBに生じた磁力により、ポール2がN極となり(ポール4がS極となり)、ポール2のN極がロータの永久磁石のS極を引き込むと共に、ポール4のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルA’に切り換えたとき、コイルA’に生じた磁力により、ポール3がN極となり(ポール1がS極となり)、ポール3のN極がロータの永久磁石のS極を引き込むと共に、ポール1のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルB’に切り換えたとき、コイルB’に生じた磁力により、ポール4がN極となり(ポール2がS極となり)、ポール4のN極がロータの永久磁石のS極を引き込むと共に、ポール2のS極が永久磁石のN極を引き込む。
【0010】
以上のように、駆動手段が電流を供給する対象をコイルA、B、A’、B’の順に切り換えることにより、順番にN極となったポール1、2、3、4がロータの永久磁石のS極を引き込みと共に、順番にS極となったポール3、4、1、2がロータの永久磁石のN極を引き込み、ロータを1回転させる。
【0011】
ロータを所定方向に所定角度だけ回転させた場合、駆動手段が電流を供給する対象のコイルの切り換えを終了し、終了時に電流を供給したコイルに生じた磁力により、ロータを所定位置にホールディングトルクと呼ばれる力で保持する。例えば、ロータの回転終了時に、電流を供給する対象を、コイルAにしたとき、コイルAに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータの永久磁石のN極を引き込み、ロータを保持する。
【0012】
このようなステッピングモータを動力源として分注アームを回動させる場合、ステッピングモータのロータを分注アームに連動させる。自動分析装置の立ち上げ時に、駆動手段に電源を投入すると、駆動手段が電流を供給する対象のコイルを予め定めており、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持する。電源投入時に、駆動手段が電流を供給する対象を例えば、コイルAにしたとき、コイルAに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータの永久磁石のN極を引き込み、ロータを保持し、それにより、分注アームを初期位置(例えば待機位置)に保持する。
【0013】
上記ステッピングモータを動力源とする構成要素として、分注アームの他に、例えば、試料容器を円周方向に配列して載置する試料ディスク、試薬容器を円周方向に配列して載置する試薬ディスク、及び、反応容器を円周方向に配列して載置する反応ディスクを有する自動分析装置がある(特許文献2)。
【0014】
上記分注アーム以外の各構成要素においても、分注アームと同様に、自動分析装置の立ち上げ時に、駆動手段に電源を投入した場合、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持し、それにより、各構成要素を初期位置に保持する。
【0015】
また、自動分析装置においては、試料及び試薬を反応容器に分注し、生成された反応溶液の成分量を測定する。反応容器は反応庫に収容されている。反応庫の内部温度を所定温度に上昇及び維持するためのヒータが設けられている。
【0016】
自動分析装置の立ち上げ時に、ヒータに電流を供給することにより、反応庫の内部温度を所定温度になるまで上昇させる。反応庫の内部温度を所定温度に上昇させた後に、反応溶液の成分量を測定することが可能となる。また、反応溶液の成分量の測定中に、反応庫の内部温度が所定温度より低くなった場合、ヒータに電流を供給し、反応庫の内部温度が所定温度に達した場合、ヒータに対する電流の供給を停止し、反応庫の内部温度を所定温度に維持する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開平9−274047号公報
【特許文献2】特開2000−346853号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
しかしながら、上記特許文献1及び2にそれぞれ記載された従来の自動分析装置では、
立ち上げ時に、駆動手段に対し電源を投入すると、上記したように、駆動手段が電流を供給する対象のコイルを予め定めており、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持し、それにより、分注アームを例えば初期位置に保持する。ステッピングモータを動力源とする他の構成要素も、電源を投入すると、分注アームと同様に所定位置に保持する。
【0019】
駆動手段に対し電源を投入した後に、分注プローブの保守点検等を行う場合、コイルに生じた磁力により、分注アームが初期位置に保持されているため、分注アームを手操作で容易に移動させることができないという問題点があった。同様の問題点が、分注ノズル以外の他の構成要素を手操作で移動させる場合もあった。
【0020】
また、分注アームを初期位置に保持するために、ステッピングモータのコイルに電流を供給し続けているので、無駄な電力を消費するという問題点もあった。
【0021】
仮に、駆動手段に対し電源を投入してから反応庫の内部温度が所定温度に達するまでのアイドリング期間中に、分注アームを手操作で容易に移動するために、電源を投入しないで、ステッピングモータのコイルを無励磁状態にした場合、ヒータにも電源が投入されないため、反応庫の内部温度を設定温度に上昇させることができず、分注プローブの保守点検等を終了後に、ヒータに電源を投入するため、アイドリング期間が長期化するという問題点があった。
【0022】
さらに、反応溶液の成分量の測定中に、例えば故障した分注アームを手操作で容易に移動させるために、駆動手段に投入した電源を落とした場合、ヒータに投入した電源も落ちて、反応庫の内部温度が所定温度より低くなってしまうおそれがある。この場合、再び、反応庫の内部温度を所定温度まで上昇させてから、反応溶液の成分量を測定させる必要があるため、反応溶液の成分量の測定を再開するまでの期間が長期化するという問題点があった。
【0023】
この発明は、上記の問題を解決するものであり、駆動手段に電源を投入した後に、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能な自動分析装置、及び、モータの駆動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0024】
上記課題を解決するため、この発明は、自動分析装置の立ち上げ時に、モータのコイルを無励磁状態にすることに着目した。
具体的に、この発明の第1の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、前記自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータと、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、を有することを特徴とする自動分析装置である。
また、この発明の第2の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、試料又は試薬が入れられ、吸引位置にそれぞれ配置された分注元容器と、所定方向に並べられ、前記所定方向上に設けられた吐出位置に順に移動する反応容器と、前記吸引位置に配された前記各分注元容器から前記試料及び前記試薬をそれぞれ吸引し、前記吸引した前記試料及び前記試薬を前記吐出位置に移動した前記反応容器にそれぞれ吐出する分注プローブと、前記分注プローブを前記吸引位置と前記吐出位置との間で往復移動させるように回動する分注アームと、前記分注アームに連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを順次回転させる制御手段と、を有することを特徴とする自動分析装置である。
さらに、この発明の他の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置に用いられ、該自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータの駆動制御装置において、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、を有することを特徴とするモータの駆動制御装置である。
【発明の効果】
【0025】
この発明によると、自動分析装置の立ち上げ時に、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能となる。
【0026】
また、この発明の第1、第2及び他の形態によると、駆動手段に電源を投入してから予め定められた指示を受けるまで、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能となる。
【図面の簡単な説明】
【0027】
【図1】この発明の一実施形態に係る自動分析装置の全体図である。
【図2】分注アームの駆動装置の斜視図である。
【図3】ステッピングモータのステータとコイルを概念的に示した図である。
【図4】ステッピングモータの駆動制御装置のブロック図である。
【図5】分注プローブの保守点検時のコイルの励磁状態を示す図である。
【図6】励磁信号タイムチャートである。
【発明を実施するための形態】
【0028】
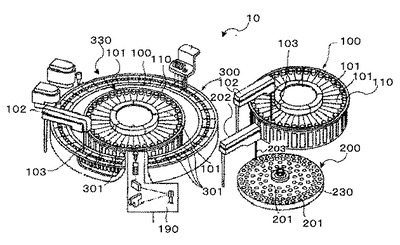
この発明の一実施形態に係る自動分析装置の構成について図1から図6を参照して説明する。図1は、自動分析装置の全体図、図2は、分注アームの駆動装置の斜視図である。
【0029】
先ず、自動分析装置の基本的な構成について図1及び図2を参照して説明する。自動分析装置10は、第1及び第2の試薬庫100、試薬を収容する試薬容器101、試薬アーム102、試薬プローブ103、試薬庫ケース110、試料庫200、試料(生体サンプル)を収容する試料容器201、試料アーム202、試料プローブ203、反応庫300、反応容器301、ステッピングモータ40、駆動手段50、電源51、制御手段52、及び、その他の構成要素を有する。ここで、試薬アーム102及び試料アーム202が分注アームに相当し、試薬プローブ103及び試料プローブ203が分注プローブに相当する。また、試薬容器101及び試料容器201が分注元容器に相当する。
【0030】
第1及び第2の各試薬庫100は基本的に同じ構成をしている。以下に、第1の試薬庫100について主に説明し、第2の試薬庫100については、第1の試薬庫100と重複する説明を省略する。試薬庫100は、試薬容器101を円周方向に並べた状態で載置し、試薬容器101を円周方向に回転させることにより、複数の試薬容器101を順番に吸引位置に搬送するステッピングモータを含む試薬庫用駆動部(図示省略)を有する。試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。
【0031】
第2の試薬庫100の試薬容器101には、前記第1の試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。
【0032】
試料庫200は、複数の試料容器201を円周方向に並べた状態で載置するディスクサンプラである試料ラック230と、試料ラック230を円周方向に回転させることにより、複数の試料容器201を順番に吸引位置に搬送するステッピングモータを含む試料庫用駆動部(図示省略)とを有する。
【0033】
反応庫300には複数の反応容器301が収容されている。反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に吐出位置に搬送するステッピングモータを含む反応庫用駆動部(図示省略)とを有する。
【0034】
試薬アーム102の先端部には試薬プローブ103が設けられている。試薬プローブ103は、吸引位置に搬送された試薬容器101から試薬を吸引し、吸引した試薬を、吐出位置に搬送された反応容器301に吐出する。試薬アーム102は、試薬プローブ103を吸引位置と吐出位置との間で往復移動させるように回動する。試料アーム202の先端部には試料プローブ203が設けられている。試料プローブ203は、吸引位置に搬送された試料容器201から試料を吸引し、吸引した試料を、吐出位置に搬送された反応容器301に吐出する。試料アーム202は、試料プローブ203を吸引位置と吐出位置との間で移動させるように回動する。
【0035】
次に、自動分析装置10の構成及び動作についてさらに詳細に説明する。試薬プローブ103を下降及び上昇させ、及び、試薬プローブ103を吸引位置と吐出位置との間に移動させ、さらに、洗浄位置、及び、待機位置に移動させるためのステッピングモータを含む試薬プローブ駆動部(図示省略)と、試薬プローブ103により、試薬を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。試薬アーム102が回動し、試薬プローブ103が待機位置から吸引位置に移動すると、試薬プローブ駆動部が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0036】
次に、電磁弁が作動し、試薬プローブ駆動部が試薬プローブ103を上昇させる。試薬アーム102が回動し、試薬プローブ103が吸引位置から吐出位置に移動すると、試薬プローブ駆動部が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試薬プローブ駆動部が試薬プローブ103を上昇させる。試薬アーム102が回動し、試薬プローブ103が吐出位置から洗浄位置に移動し、試薬プローブ103の洗浄を終了した後に、待機位置に移動する。
【0037】
試料プローブ203を下降及び上昇させ、及び、試料プローブ203を吸引位置と吐出位置との間に移動させ、さらに、洗浄位置、及び、待機位置に移動させるためのステッピングモータを含む試料プローブ駆動部(図示省略)と、試料プローブ203により、試料を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試料吸排部が設けられている。試料アーム202が回動し、試料プローブ203が待機位置から吸引位置に移動すると、試料プローブ駆動部が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の試料容器201から試料を吸引させる。
【0038】
次に、電磁弁が作動し、試料プローブ駆動部が試料プローブ203を上昇させる。試料アーム202が回動し、試料プローブ203が吸引位置から吐出位置に移動すると、試料プローブ駆動部が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試料プローブ駆動部が試料プローブ203を上昇させる。試料アーム202が回動し、試料プローブ203が吐出位置から洗浄位置に移動し、試料プローブ203の洗浄を終了した後、待機位置に移動する。
【0039】
以上のように、試料及び試薬が分注された反応容器301を、反応庫用駆動部によって、測光ユニット190の方へ移動させる。それまでの間、反応容器301内の試料及び試薬は攪拌子(図示省略)によって攪拌される。測光ユニット190は、攪拌後の反応容器301に光を照射して、透過した光から設定波長における吸光度を測定する。
【0040】
以上説明したように、分注アーム(試薬アーム102及び試料アーム202)、試薬庫100、試料庫200、及び、反応庫300が、ステッピングモータを動力源とする構成要素に相当する。以下の説明において、分注アームの駆動装置の代表として試薬アーム102の駆動装置を説明し、他の構成要素の駆動装置の説明を省略する。
【0041】
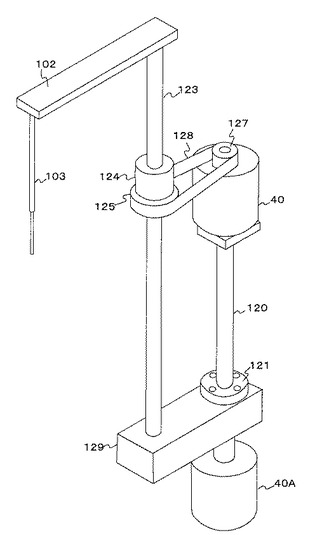
試薬アーム102の駆動装置の基本的な概略構成について図1及び図2を参照して説明する。試薬アーム102の先端に、この試薬アーム102の軸方向に対して垂直に、試薬プローブ103が固定されている。試薬アーム102の末端は、この試薬アーム102の軸方向に対して垂直に設けられているスプライン軸123の上端に固定支持されている。
【0042】
このスプライン軸123の略中間には回動機構124が固定されており、この回動機構124にはスプライン側プーリ125が同心円上に設けられている。このスプライン側プーリ125と、自動分析装置10のフレーム(図示省略)に固定され、回動機構124の駆動源を構成するステッピングモータ40の回転シャフトに固定されたモータ側プーリ127との間には、回動用ベルト128が掛け渡されて、モータ側プーリ127の回動に対してスプライン側プーリ125が連動して回動するようになっている。
【0043】
スプライン軸123の下端はブロック129に回動自在に軸支され、このブロック129にはボールネジ120のナット121が固定されている。さらに、前記ボールネジ120には、自動分析装置10のフレームに固定された上下動用ステッピングモータ40Aの回転軸が直接連結されており、ボールネジ120が回転することにより、ナット121が上下運動し、それに伴ってブロック129が上下運動するようになっている。
【0044】
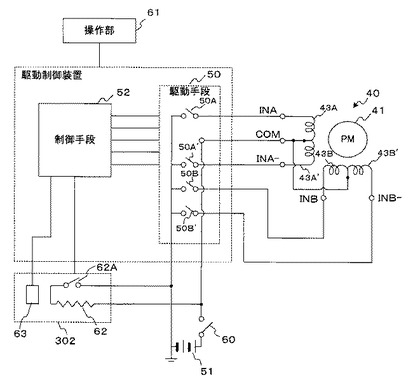
以上、試薬アーム102の駆動装置について説明した。次に、ステッピングモータ40、及び、ステッピングモータ40の駆動制御装置について図3及び図4を参照して説明する。図3はステッピングモータのステータとコイルを概念的に示した図、図4はステッピングモータ40の駆動制御装置のブロック図である。なお、以下に、2相式のPM形のステッピングモータ40を一例として説明するが、ステッピングモータ40については、2相式、及び、PM形に限定するものではない。
【0045】
ステッピングモータ40は、分注アームに連動するロータ41と、ステータ42と、ステータ42に設けられ、供給される電流により励磁される複数のコイル43とを有する。
【0046】
ロータ41には永久磁石が設けられている。ステータ42には、ロータ41の回転方向に沿って4つポールが90°間隔で設けられている。0°、90°、180°、270°の位置にそれぞれ設けられたポール1〜4、及び、ポール1〜4に巻かれたコイル43A〜43B’を図4(a)に示す。なお、図4(a)では、各コイルが各ポールに巻かれているように示したが、実際は、以下に示すように、コイル43A〜43B’は巻かれている。
【0047】
ロータ41の回転中心に互いに向き合う0°のポール1と180°のポール3に1本の電線であるコイル43Aが巻かれ、さらに、1本の電線であるコイル43A’が巻かれている。コイル43Aとコイル43A’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、コイル43Aとコイル43A’は、共通の端子COMを有している。ポール1とポール3にそれぞれ巻かれたコイル43A、及び、コイル43A’を図4(b)に示す。
【0048】
同様に、ロータ41の回転中心に互いに向き合う90°のポール2と270°のポール4に1本の電線であるコイル43Bが巻かれ、さらに、1本の電線であるコイル43B’が巻かれている。コイル43Bとコイル43B’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、コイル43Bとコイル43B’は、共通の端子COMを有している。なお、図4(b)に示すコイル43A、及び、コイル43A’と同様に、コイル43B、及び、コイル43B’もポール2とポール4にそれぞれ巻かれている。
【0049】
ステッピングモータ40の駆動制御装置は、電流を供給する対象のコイルを切り換える
駆動手段50と、駆動手段50に電流を供給する電源51と、コイルに対する電流の供給を制御する制御手段52とを有している。
【0050】
駆動手段50は、例えば、アレイ上に並べたセルと配線用素子とにより構成されたFPGA(Field Programmable Gate Array)を有している。なお、FPGAを概念的に表したスイッチ群を図3に示す。
【0051】
コイル43A、43A’は、共に端子COMを介して電源51の正極に接続されている。コイル43Aの他方の端子INAは、スイッチ50Aを介して電源51の負極に接続されている。同様に、コイル43A’の他方の端子INA−は、スイッチ50A’を介して電源51の負極に接続されている。
【0052】
また、コイル43B、43B’は、共に端子COMを介して電源51の正極に接続されている。コイル43Bの他方の端子INBは、スイッチ50Bを介して電源51の負極に接続されている。同様に、コイル43B’の他方の端子INB−は、スイッチ50B’を介して電源51の負極に接続されている。
【0053】
次に、反応庫300の内部温度を所定温度に上昇及び維持する構成について図3を参照して説明する。
【0054】
自動分析装置10は、ヒータ62、スイッチ62A及び温度検出手段63を有している。ヒータ62の一端は、電源51の正極に接続され、ヒータ62の他端は、スイッチ62Aを介して電源51の負極に接続されている。制御手段52は、始動スイッチ60がオンし、駆動手段50に対して電源51が投入されると、温度検出手段63の検出信号を受けて、反応庫300の内部温度が所定温度より低いと判断した場合にスイッチ62Aをオンの状態にし、反応庫300の内部温度が所定温度に達したと判断した場合にスイッチ62Aをオフの状態にする。駆動手段50に対して電源51が投入されてから反応庫300の内部温度が所定温度に達し、反応溶液の成分量測定が可能になるまでのアイドリング期間中、制御手段52は、上記のようにスイッチ62Aを制御する。
【0055】
アイドリング期間が経過した後、制御手段52は、温度検出手段63の検出信号を受けて、反応庫300の内部温度が所定温度より低いと判断した場合にスイッチ62Aをオンの状態にし、反応庫300の内部温度が所定温度に達したと判断した場合にスイッチ62Aをオフの状態にする。
【0056】
次に、自動分析装置10の一連の動作について、図5及び図6を参照して説明する。図5は、分注プローブの保守点検時のコイルの励磁状態を示す図、図6は、励磁信号のタイミングチャートである。なお、構成要素の駆動装置について、試薬アーム102の駆動装置を代表して説明し、他の構成要素の駆動装置の説明を省略する。
【0057】
先ず、自動分析装置10の立ち上げ時に、始動スイッチ60をオンし、駆動手段50に対して電源51を投入すると、制御手段52が、4つのスイッチ50A〜50B’のいずれもオフの状態にし、コイル43A〜43B’の各端子INA〜INB’の電圧が全てHレベルとなる。同じく、端子COMの電圧がHレベルであるため、コイル43A〜43B’のいずれにも電流が供給されず、無励磁状態(図5に示すコイルの無励磁状態)となる。
【0058】
それにより、ステータ42のポール1〜4は、ロータ41のN極又はS極を引き込まず、ロータ41を保持しない。例えば、試薬アーム102を手操作で容易に手前側(作業者側)に移動して、試薬プローブ103の保守点検等を容易に行うことが可能となる。4つのコイル43A〜43B’のいずれも無励磁状態としたので、無駄な電力を消費させずに済む。
【0059】
なお、駆動手段50に対して電源51を投入した後に、試薬プローブ103の保守点検等を行う場合、試薬アーム102がいずれの位置にあっても、ステッピングモータのコイルのいずれも無励磁状態としたが、試薬アーム102を予め定められた位置(例えば、待機位置や初期位置)に移動させてから、ステッピングモータのコイルのいずれも無励磁状態としても良い。
【0060】
また、自動分析装置10の立ち上げ時に、始動スイッチ60をオンし、ヒータ62に対して電源51を投入すると、制御手段52が、温度検出手段63の検出信号を受け、反応庫300の内部温度が所定温度より低いと判断した場合、スイッチ62Aをオンの状態にし、ヒータ62に電流を供給し、反応庫300の内部温度が所定温度に達したと判断した場合、スイッチ62Aをオフの状態にし、ヒータ62に対する電流の供給を停止する。
【0061】
電源51を投入してから反応庫300の内部温度が所定温度に達するまでのアイドリング期間中、ヒータ62は、電流を供給され続けるため、反応庫300の内部温度を所定温度に連続的に上昇させる。それにより、反応庫300の内部温度を所定温度に上昇させるまでの時間に無駄がなく、アイドリング期間の長期化を防止することが可能となる。
【0062】
アイドリング期間を経過した後に、制御手段52は、温度検出手段63の検出信号を受け、反応庫300の内部温度が所定温度より低いと判断した場合に、スイッチ62Aをオンの状態にし、ヒータ62に電流を供給し、反応庫300の内部温度が所定温度に達したと判断した場合に、スイッチ62Aをオフの状態にし、ヒータ62に対する電流の供給を停止する。それにより、反応庫300の内部温度を所定温度に維持する。
【0063】
次に、比較例に係るステッピングモータの駆動制御装置について図5を参照して説明する。比較例に係るステッピングモータの駆動制御装置が前記実施形態と異なる点は、制御手段の構成にある。
【0064】
比較例において、自動分析装置10の立ち上げ時において、始動スイッチ60をオンし、駆動手段50に対して電源51を投入すると、制御手段(図示省略)は、予め定められたコイルを励磁する。例えば、制御手段は、スイッチ50A、50Bをオンの状態にし、スイッチ50A’、50B’をオフの状態にし、コイル43A、43Bの各端子INA、INBの電圧がLレベルとなり、端子COMの電圧がHレベルとなるため、コイル43A、43Bに電流が供給され、励磁状態(図5に示すコイルの励磁状態)となる。コイル43Aに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータ41の永久磁石のN極を引き込み、ロータ41を保持し、それにより、試薬アーム102を初期位置(例えば待機位置)に保持する。
【0065】
比較例においては、駆動手段50に対して電源51を投入した後に、試薬プローブ103の保守点検等を行う場合に、試薬アーム102を手操作で手前側(作業者側)に移動しようとするとき、ロータ41の保持力に抗して行うために困難を伴う。また、所定のコイルに電流を供給し続けているので、無駄な電力を消費する。
以上で、本実施形態に対する比較例についての説明を終了する。
【0066】
次に、本実施形態において、アイドリング期間経過後に行われる反応溶液の成分量の測定について説明する。反応溶液の成分量の測定については、上記したように、試薬庫用駆動部(図示省略)により試薬容器101が順番に吸引位置に搬送される。また、試料庫用駆動部(図示省略)により試料容器201が順番に吸引位置に搬送される。さらに、反応庫用駆動部(図示省略)により反応容器301が順番に吐出位置に搬送される。及び、試薬アーム102の駆動装置は、吸引位置と吐出位置との間を試薬プローブ103が移動するように試薬アーム102を回動させる。また、試料アーム202の駆動装置は、吸引位置と吐出位置との間を試料プローブ203が移動するように試料アーム202を回動させる。
【0067】
上記の試薬庫駆動部、試料庫用駆動部、反応庫用駆動部、試薬アーム102の駆動装置、及び、試料アーム202の駆動装置は、それぞれステッピングモータ及びステッピングモータの駆動制御装置を備えている。それらのステッピングモータ及びステッピングモータの駆動制御装置は、基本的に同じ構成をしている。以下、試薬アーム102の駆動装置を代表して説明し、他の駆動装置の説明を省略する。
【0068】
アイドリング期間経過後、予め定められた指示(例えば、反応溶液の成分量の測定開始指示)を受けて、制御手段52は、駆動手段50を制御し、駆動手段50は、電流を供給する対象であるコイルを切り換える。また、制御手段52は、ヒータ62のスイッチ62Aを制御し、反応庫300の内部温度を所定温度に維持する。
【0069】
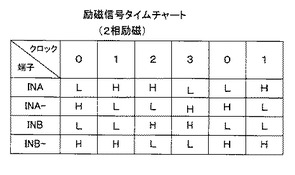
駆動手段50は、電流を供給する対象であるコイル43A〜コイル43B’を切り換えることにより、ロータ41を所定方向に回転させる。2相励磁方式を基にして、駆動手段50により切り換えられるコイル43Aの端子INA〜コイル43B’の端子INB−の電圧レベルを図6に示す。
【0070】
クロック0で、制御手段52は、スイッチ50A及びスイッチ50Bをオンにし、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをL、H、L、Hにする。それにより、コイル43A及びコイル43Bに電流がそれぞれ供給され、ポール1及びポール2がN極となり、ポール3及びポール4がS極となる。ポール1がロータ41のS極を引き込み、ポール3がロータ41のN極を引き込み、ポール2がロータのN極を斥け、ポール4がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0071】
クロック1で、制御手段52は、スイッチ50Aをオンからオフに切り換え、スイッチ50A’をオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをH、L、L、Hにする。それにより、コイル43Aに電流が停止し、ポール1がS極となり、コイル43A’に電流が供給され、ポール3がN極となる。ポール2がロータ41のS極を引き込み、ポール4がロータ41のN極を引き込み、ポール3がロータのN極を斥け、ポール1がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0072】
クロック2で、制御手段52は、スイッチ50Bをオンからオフに切り換え、スイッチ50B’をオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをH、L、H、Lにする。それにより、コイル43Bに電流が停止し、ポール2がS極となり、コイル43B’に電流が供給され、ポール4がN極となる。ポール3がロータ41のS極を引き込み、ポール1がロータ41のN極を引き込み、ポール4がロータのN極を斥け、ポール2がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0073】
クロック3で、制御手段52は、スイッチ50A’をオンからオフに切り換え、スイッチ50Aをオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをL、H、H、Lにする。それにより、コイル43A’に電流が停止し、ポール3がS極となり、コイル43Aに電流が供給され、ポール4がN極となる。ポール4がロータ41のS極を引き込み、ポール2がロータ41のN極を引き込み、ポール1がロータのN極を斥け、ポール3がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0074】
上記クロック0から上記クロック3により、ロータ41が1回転する。その後、再び、クロック0に戻る。そして、クロック0からクロック3までの制御を繰り返すことによりロータ41が回転し続ける。
【0075】
試薬プローブ103が所定位置(例えば吸引位置)に移動した場合、ロータ41の回転を停止する。クロック0で、ロータ41の回転が停止したとき、コイル43A及びコイル43Bに電流がそれぞれ供給され、ポール1及びポール2がN極となり、ポール3及びポール4がS極となる。ポール1がロータ41のS極を引き込み、ポール3がロータ41のN極を引き込む。それにより、ロータ41を保持し、試薬アーム102を停止位置に保持する。
【0076】
次に、反応溶液の成分量を測定中に、例えば、試薬プローブ103の点検等を目的として、試薬アーム102を手操作で操作する場合について説明する。
【0077】
操作部61の操作による指示を受けて、制御手段52は、4つのスイッチ50A〜50B’のいずれもオフの状態にし、コイル43A〜43B’の各端子INA〜INB’の電圧が全てHレベルとなる。同じく、端子COMの電圧がHレベルであるため、コイル43A〜43B’のいずれにも電流が供給されず、無励磁状態(図5に示すコイルの無励磁状態)となる。それにより、ステータ42のポール1は、ロータ41のS極を引き込まず、ポール3は、ロータ41のN極を引き込まない。その結果、ロータ41を保持せず、例えば、試薬アーム102を手操作で容易に手前側(作業者側)に移動して、試薬プローブ103の点検等を容易に行うことが可能となる。また、制御手段52は、ヒータ62に対する電流の供給を停止しないので、反応庫300の内部温度を所定温度に維持すること可能となり、試薬プローブ103の点検後に、反応溶液の成分量の測定を即座に再開することが可能となる。
【0078】
なお、反応溶液の成分量の測定中に、試薬アーム102を手操作で移動するとき、試薬アーム102を予め定められた位置に回動させた後に、コイル43A〜43B’を無励磁状態にしても良い。予め定められた位置に回動させた後の試薬アーム102を手操作で移動するので、より安全に試薬アーム102を移動させることが可能となる。
【0079】
例えば、ロータ41の回転軸に取り付けたエンコーダ(検出手段)により、試薬アーム102の回動位置を検出する。制御手段52は、操作部61の操作による指示を受けた場合、スイッチ50A〜50B’をオン又はオフにし、駆動手段50が電流を供給する対象であるコイルを切り換え、ロータ41を所定方向に所定量だけ回転させ、試薬アーム102を予め定められた位置(例えば、待機位置)に回動させる。試薬アーム102が予め定められた位置に回動したことの信号を受けて、制御手段52は、ロータ41の回転を停止させる。
【0080】
なお、前記実施形態では、試薬アーム102の駆動装置におけるステッピングモータ40及びステッピングモータ40の駆動制御装置を代表して説明したが、これに限らず、試薬庫駆動部、試料庫用駆動部、及び、反応庫用駆動部においても、上記したステッピングモータ40及びステッピングモータ40の駆動制御装置と同様な構成にすることができる。この場合、ステッピングモータ40のロータ41を各駆動部の構成要素に連動させる。制御手段がいずれのコイルに対しても電流の供給を停止させることで、各構成要素を手操作で容易に移動させることが可能となり、無駄な電力の消費を防止することが可能となり、ヒータ62に電流を供給し続けることで、反応庫300の内部温度が連続的に所定温度まで上昇し、アイドリング期間の長期化を防止することが可能となる。また、反応溶液の成分量の測定中であっても、操作部61の操作による指示を受けて、制御手段がいずれのコイルに対しても電流の供給を停止させることで、各構成要素を手操作で容易に移動させることが可能となる。コイルに対する電流の供給を停止しても、ヒータ62に対する電流の供給を停止させないので、反応庫300の内部温度を所定温度に維持することができ、反応溶液の成分量の測定再開までの期間の長期化を防止することが可能となる。
【0081】
また、コイルに対する電流の供給を停止しても、電流供給が必要な他の構成要素に対する電流の供給を停止しないので、この点からも、反応容器の成分量の測定の開始及び再開の迅速化を図ることが可能となる。
【0082】
さらに、前記実施形態では、自動分析装置10を構成する構成要素に動力を供給する動力源として、ステッピングモータ40を代表して説明したが、ステッピングモータ40以外のモータであっても良い。例えば、ロータの検出位置に応じて直流電流の極性を切り替えるブラシレスDCモータであっても良い。ブラシレスDCモータは、パルス幅変調(PWM)方式により駆動制御される。また、一直線に長く伸びたステータに置かれたロータを、磁界の変化により直線運動させるリニアモータであっても良い。
【符号の説明】
【0083】
10 自動分析装置 100 試薬庫 101 試薬容器
102 試薬アーム 103 試薬プローブ 110 試薬庫ケース
120 ボールネジ 121 ナット 123 スプライン軸
124 回動機構 125 スプライン側プーリ 127 モータ側プーリ
128 回動用ベルト 129 ブロック
200 試料庫 201 試料容器 202 試料アーム
203 試料プローブ 300 反応庫 301 反応容器
40 ステッピングモータ 50 駆動手段 51 電源
52 制御手段 60 始動スイッチ 61 操作部 62 ヒータ
63 温度検出手段
【技術分野】
【0001】
この発明は、自動分析装置及びモータの駆動制御装置に関し、特に、試料及び試薬を反応容器にそれぞれ分注して反応溶液を生成し、該反応溶液の成分量を測定する自動分析装置及びモータの駆動制御装置に関する。
【背景技術】
【0002】
一般に、自動分析装置では、試料容器から反応容器へ試料(検体)を分注するとき又は試薬容器から反応容器に試薬を分注するときに、まず、試料容器の開口部の上方あるいは試薬容器の開口部の上方(吸引位置)に位置するように分注アームが回動し、分注アームの回動を終了すると、分注アームは降下して、分注プローブの先端が試料容器内の試料あるいは試薬容器内の試薬に浸かり、真空ポンプ等による吸引動作により試料あるいは試薬が分注プローブ内に吸引される。
【0003】
ここで、分注アームは上昇して分注プローブが試料容器あるいは試薬容器から抜き出されると、分注アームは、反応容器の開口部の上方(吐出位置)に分注プローブが位置するように回動し、この回動を終了すると分注アームは降下して、分注プローブの先端が反応容器内に入り、試料あるいは試薬を予め設定された量だけ反応容器内に吐出する。この吐出が終了すると、分注アームは上昇して、分注プローブが反応容器から抜け出す。
【0004】
分注プローブの先端は試料あるいは試薬に浸かるので、その分注プローブの先端部分には試料あるいは試薬が付着する。従って、分注プローブの先端が試料あるいは試薬に浸かった後、分注アームが上昇したとき又は回動したときには、分注アームの動作状態によって、分注プローブの先端に付着した試料あるいは試薬が飛散するおそれがある。このような分注プローブの先端に付着した試料あるいは試薬の飛散により、飛散した溶液が、他の反応容器、試料容器、試薬容器に混入するとコンタミネーション(汚染)が発生し、反応溶液の成分量を測定するときの精度が低下する。
【0005】
コンタミネーション(汚染)の発生を防止するため、試料あるいは試薬の吐出が終了し、分注プローブを反応容器から抜き出した後、分注プローブを洗浄位置に位置させるように、分注アームは回動し、分注プローブの洗浄後、分注プローブを待機位置に位置させるように、分注アームは回動し、次の試料あるいは試薬の分注に備える。以上により試料あるいは試薬の一連の分注動作を終了する。
【0006】
上記試料あるいは試薬の一連の分注動作において、分注アームを回動、上昇、及び、下降させるときの動力源としてステッピングモータを使用する自動分析装置がある(特許文献1)。
【0007】
ステッピングモータは、動作させる対象を制御するためのフィードバック信号を必要とせず、対象の位置決め誤差が累積しない等の利点がある。例えば、PM形ステッピングモータとしては、ロータと、ステータと、ロータに設けられた永久磁石と、ステータに設けられた複数のポールと、各ポールに巻かれて、供給される電流により励磁される複数のコイルとを有している。その中で2相のステッピングモータでは、ロータの回転方向に沿って、ポール1〜4が設けられ、ポール1とポール3に1本の電線であるコイルAが巻かれ、さらに、1本の電線であるコイルA’が巻かれている。コイルAとコイルA’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、ポール2とポール4に1本の電線であるコイルBが巻かれ、さらに、1本の電線であるコイルB’が巻かれている。コイルBとコイルB’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。コイルAに電流を供給したとき、ポール1、3がN極、S極となり、コイルA’に電流を供給したとき、ポール1、3がS極、N極となる。また、コイルBに電流を供給したとき、ポール2、4がN極、S極となり、コイルB’に電流を供給したとき、ポール2、4がS極、N極となる。
【0008】
このようなステッピングモータの駆動制御装置としては、電流を供給する対象のコイルを切り換える駆動手段(スイッチング回路)と、駆動手段に電流を供給する電源と、駆動手段を制御する制御手段とを有している。
【0009】
上記の2相のステッピングモータの各コイルを例えば1相励磁方式により励磁する場合、駆動手段が電流を供給する対象をコイルAに切り換えたとき、コイルAに生じた磁力により、ポール1がN極となり(ポール3がS極となり)、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルBに切り換えたとき、コイルBに生じた磁力により、ポール2がN極となり(ポール4がS極となり)、ポール2のN極がロータの永久磁石のS極を引き込むと共に、ポール4のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルA’に切り換えたとき、コイルA’に生じた磁力により、ポール3がN極となり(ポール1がS極となり)、ポール3のN極がロータの永久磁石のS極を引き込むと共に、ポール1のS極が永久磁石のN極を引き込む。次に、駆動手段が電流を供給する対象をコイルB’に切り換えたとき、コイルB’に生じた磁力により、ポール4がN極となり(ポール2がS極となり)、ポール4のN極がロータの永久磁石のS極を引き込むと共に、ポール2のS極が永久磁石のN極を引き込む。
【0010】
以上のように、駆動手段が電流を供給する対象をコイルA、B、A’、B’の順に切り換えることにより、順番にN極となったポール1、2、3、4がロータの永久磁石のS極を引き込みと共に、順番にS極となったポール3、4、1、2がロータの永久磁石のN極を引き込み、ロータを1回転させる。
【0011】
ロータを所定方向に所定角度だけ回転させた場合、駆動手段が電流を供給する対象のコイルの切り換えを終了し、終了時に電流を供給したコイルに生じた磁力により、ロータを所定位置にホールディングトルクと呼ばれる力で保持する。例えば、ロータの回転終了時に、電流を供給する対象を、コイルAにしたとき、コイルAに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータの永久磁石のN極を引き込み、ロータを保持する。
【0012】
このようなステッピングモータを動力源として分注アームを回動させる場合、ステッピングモータのロータを分注アームに連動させる。自動分析装置の立ち上げ時に、駆動手段に電源を投入すると、駆動手段が電流を供給する対象のコイルを予め定めており、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持する。電源投入時に、駆動手段が電流を供給する対象を例えば、コイルAにしたとき、コイルAに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータの永久磁石のN極を引き込み、ロータを保持し、それにより、分注アームを初期位置(例えば待機位置)に保持する。
【0013】
上記ステッピングモータを動力源とする構成要素として、分注アームの他に、例えば、試料容器を円周方向に配列して載置する試料ディスク、試薬容器を円周方向に配列して載置する試薬ディスク、及び、反応容器を円周方向に配列して載置する反応ディスクを有する自動分析装置がある(特許文献2)。
【0014】
上記分注アーム以外の各構成要素においても、分注アームと同様に、自動分析装置の立ち上げ時に、駆動手段に電源を投入した場合、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持し、それにより、各構成要素を初期位置に保持する。
【0015】
また、自動分析装置においては、試料及び試薬を反応容器に分注し、生成された反応溶液の成分量を測定する。反応容器は反応庫に収容されている。反応庫の内部温度を所定温度に上昇及び維持するためのヒータが設けられている。
【0016】
自動分析装置の立ち上げ時に、ヒータに電流を供給することにより、反応庫の内部温度を所定温度になるまで上昇させる。反応庫の内部温度を所定温度に上昇させた後に、反応溶液の成分量を測定することが可能となる。また、反応溶液の成分量の測定中に、反応庫の内部温度が所定温度より低くなった場合、ヒータに電流を供給し、反応庫の内部温度が所定温度に達した場合、ヒータに対する電流の供給を停止し、反応庫の内部温度を所定温度に維持する。
【先行技術文献】
【特許文献】
【0017】
【特許文献1】特開平9−274047号公報
【特許文献2】特開2000−346853号公報
【発明の概要】
【発明が解決しようとする課題】
【0018】
しかしながら、上記特許文献1及び2にそれぞれ記載された従来の自動分析装置では、
立ち上げ時に、駆動手段に対し電源を投入すると、上記したように、駆動手段が電流を供給する対象のコイルを予め定めており、電流を供給したコイルに生じた磁力により、ロータを所定位置に保持し、それにより、分注アームを例えば初期位置に保持する。ステッピングモータを動力源とする他の構成要素も、電源を投入すると、分注アームと同様に所定位置に保持する。
【0019】
駆動手段に対し電源を投入した後に、分注プローブの保守点検等を行う場合、コイルに生じた磁力により、分注アームが初期位置に保持されているため、分注アームを手操作で容易に移動させることができないという問題点があった。同様の問題点が、分注ノズル以外の他の構成要素を手操作で移動させる場合もあった。
【0020】
また、分注アームを初期位置に保持するために、ステッピングモータのコイルに電流を供給し続けているので、無駄な電力を消費するという問題点もあった。
【0021】
仮に、駆動手段に対し電源を投入してから反応庫の内部温度が所定温度に達するまでのアイドリング期間中に、分注アームを手操作で容易に移動するために、電源を投入しないで、ステッピングモータのコイルを無励磁状態にした場合、ヒータにも電源が投入されないため、反応庫の内部温度を設定温度に上昇させることができず、分注プローブの保守点検等を終了後に、ヒータに電源を投入するため、アイドリング期間が長期化するという問題点があった。
【0022】
さらに、反応溶液の成分量の測定中に、例えば故障した分注アームを手操作で容易に移動させるために、駆動手段に投入した電源を落とした場合、ヒータに投入した電源も落ちて、反応庫の内部温度が所定温度より低くなってしまうおそれがある。この場合、再び、反応庫の内部温度を所定温度まで上昇させてから、反応溶液の成分量を測定させる必要があるため、反応溶液の成分量の測定を再開するまでの期間が長期化するという問題点があった。
【0023】
この発明は、上記の問題を解決するものであり、駆動手段に電源を投入した後に、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能な自動分析装置、及び、モータの駆動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0024】
上記課題を解決するため、この発明は、自動分析装置の立ち上げ時に、モータのコイルを無励磁状態にすることに着目した。
具体的に、この発明の第1の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、前記自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータと、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、を有することを特徴とする自動分析装置である。
また、この発明の第2の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、試料又は試薬が入れられ、吸引位置にそれぞれ配置された分注元容器と、所定方向に並べられ、前記所定方向上に設けられた吐出位置に順に移動する反応容器と、前記吸引位置に配された前記各分注元容器から前記試料及び前記試薬をそれぞれ吸引し、前記吸引した前記試料及び前記試薬を前記吐出位置に移動した前記反応容器にそれぞれ吐出する分注プローブと、前記分注プローブを前記吸引位置と前記吐出位置との間で往復移動させるように回動する分注アームと、前記分注アームに連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを順次回転させる制御手段と、を有することを特徴とする自動分析装置である。
さらに、この発明の他の形態は、試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置に用いられ、該自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータの駆動制御装置において、前記電流を供給する対象の前記コイルを切り換える駆動手段と、前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、を有することを特徴とするモータの駆動制御装置である。
【発明の効果】
【0025】
この発明によると、自動分析装置の立ち上げ時に、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能となる。
【0026】
また、この発明の第1、第2及び他の形態によると、駆動手段に電源を投入してから予め定められた指示を受けるまで、分注アームを含む構成要素を手操作で容易に移動することが可能となり、無駄な電力の消費を防止することが可能となる。
【図面の簡単な説明】
【0027】
【図1】この発明の一実施形態に係る自動分析装置の全体図である。
【図2】分注アームの駆動装置の斜視図である。
【図3】ステッピングモータのステータとコイルを概念的に示した図である。
【図4】ステッピングモータの駆動制御装置のブロック図である。
【図5】分注プローブの保守点検時のコイルの励磁状態を示す図である。
【図6】励磁信号タイムチャートである。
【発明を実施するための形態】
【0028】
この発明の一実施形態に係る自動分析装置の構成について図1から図6を参照して説明する。図1は、自動分析装置の全体図、図2は、分注アームの駆動装置の斜視図である。
【0029】
先ず、自動分析装置の基本的な構成について図1及び図2を参照して説明する。自動分析装置10は、第1及び第2の試薬庫100、試薬を収容する試薬容器101、試薬アーム102、試薬プローブ103、試薬庫ケース110、試料庫200、試料(生体サンプル)を収容する試料容器201、試料アーム202、試料プローブ203、反応庫300、反応容器301、ステッピングモータ40、駆動手段50、電源51、制御手段52、及び、その他の構成要素を有する。ここで、試薬アーム102及び試料アーム202が分注アームに相当し、試薬プローブ103及び試料プローブ203が分注プローブに相当する。また、試薬容器101及び試料容器201が分注元容器に相当する。
【0030】
第1及び第2の各試薬庫100は基本的に同じ構成をしている。以下に、第1の試薬庫100について主に説明し、第2の試薬庫100については、第1の試薬庫100と重複する説明を省略する。試薬庫100は、試薬容器101を円周方向に並べた状態で載置し、試薬容器101を円周方向に回転させることにより、複数の試薬容器101を順番に吸引位置に搬送するステッピングモータを含む試薬庫用駆動部(図示省略)を有する。試薬容器101には、試料に含まれる特定成分に対して選択的に反応する試薬が収容されている。
【0031】
第2の試薬庫100の試薬容器101には、前記第1の試薬庫100の試薬容器101に収容されている試薬と対をなす試薬が収容されている。
【0032】
試料庫200は、複数の試料容器201を円周方向に並べた状態で載置するディスクサンプラである試料ラック230と、試料ラック230を円周方向に回転させることにより、複数の試料容器201を順番に吸引位置に搬送するステッピングモータを含む試料庫用駆動部(図示省略)とを有する。
【0033】
反応庫300には複数の反応容器301が収容されている。反応庫300は、複数の反応容器301を円周方向に並べた状態で載置する反応ライン330と、反応ライン330を円周方向に回転させることにより、複数の反応容器301を順番に吐出位置に搬送するステッピングモータを含む反応庫用駆動部(図示省略)とを有する。
【0034】
試薬アーム102の先端部には試薬プローブ103が設けられている。試薬プローブ103は、吸引位置に搬送された試薬容器101から試薬を吸引し、吸引した試薬を、吐出位置に搬送された反応容器301に吐出する。試薬アーム102は、試薬プローブ103を吸引位置と吐出位置との間で往復移動させるように回動する。試料アーム202の先端部には試料プローブ203が設けられている。試料プローブ203は、吸引位置に搬送された試料容器201から試料を吸引し、吸引した試料を、吐出位置に搬送された反応容器301に吐出する。試料アーム202は、試料プローブ203を吸引位置と吐出位置との間で移動させるように回動する。
【0035】
次に、自動分析装置10の構成及び動作についてさらに詳細に説明する。試薬プローブ103を下降及び上昇させ、及び、試薬プローブ103を吸引位置と吐出位置との間に移動させ、さらに、洗浄位置、及び、待機位置に移動させるためのステッピングモータを含む試薬プローブ駆動部(図示省略)と、試薬プローブ103により、試薬を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試薬吸排部が設けられている。試薬アーム102が回動し、試薬プローブ103が待機位置から吸引位置に移動すると、試薬プローブ駆動部が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の試薬容器101から試薬を吸引させる。
【0036】
次に、電磁弁が作動し、試薬プローブ駆動部が試薬プローブ103を上昇させる。試薬アーム102が回動し、試薬プローブ103が吸引位置から吐出位置に移動すると、試薬プローブ駆動部が試薬プローブ103を下降させる。電磁弁が作動して、試薬プローブ103により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試薬プローブ駆動部が試薬プローブ103を上昇させる。試薬アーム102が回動し、試薬プローブ103が吐出位置から洗浄位置に移動し、試薬プローブ103の洗浄を終了した後に、待機位置に移動する。
【0037】
試料プローブ203を下降及び上昇させ、及び、試料プローブ203を吸引位置と吐出位置との間に移動させ、さらに、洗浄位置、及び、待機位置に移動させるためのステッピングモータを含む試料プローブ駆動部(図示省略)と、試料プローブ203により、試料を吸引及び吐出させるためのポンプ(図示省略)と、電磁弁(図示省略)と、電磁弁を駆動させるアクチュエータ(図示省略)とを有する試料吸排部が設けられている。試料アーム202が回動し、試料プローブ203が待機位置から吸引位置に移動すると、試料プローブ駆動部が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の試料容器201から試料を吸引させる。
【0038】
次に、電磁弁が作動し、試料プローブ駆動部が試料プローブ203を上昇させる。試料アーム202が回動し、試料プローブ203が吸引位置から吐出位置に移動すると、試料プローブ駆動部が試料プローブ203を下降させる。電磁弁が作動して、試料プローブ203により所定の反応容器301に試料を吐出させる。次に、電磁弁が作動し閉じ、試料プローブ駆動部が試料プローブ203を上昇させる。試料アーム202が回動し、試料プローブ203が吐出位置から洗浄位置に移動し、試料プローブ203の洗浄を終了した後、待機位置に移動する。
【0039】
以上のように、試料及び試薬が分注された反応容器301を、反応庫用駆動部によって、測光ユニット190の方へ移動させる。それまでの間、反応容器301内の試料及び試薬は攪拌子(図示省略)によって攪拌される。測光ユニット190は、攪拌後の反応容器301に光を照射して、透過した光から設定波長における吸光度を測定する。
【0040】
以上説明したように、分注アーム(試薬アーム102及び試料アーム202)、試薬庫100、試料庫200、及び、反応庫300が、ステッピングモータを動力源とする構成要素に相当する。以下の説明において、分注アームの駆動装置の代表として試薬アーム102の駆動装置を説明し、他の構成要素の駆動装置の説明を省略する。
【0041】
試薬アーム102の駆動装置の基本的な概略構成について図1及び図2を参照して説明する。試薬アーム102の先端に、この試薬アーム102の軸方向に対して垂直に、試薬プローブ103が固定されている。試薬アーム102の末端は、この試薬アーム102の軸方向に対して垂直に設けられているスプライン軸123の上端に固定支持されている。
【0042】
このスプライン軸123の略中間には回動機構124が固定されており、この回動機構124にはスプライン側プーリ125が同心円上に設けられている。このスプライン側プーリ125と、自動分析装置10のフレーム(図示省略)に固定され、回動機構124の駆動源を構成するステッピングモータ40の回転シャフトに固定されたモータ側プーリ127との間には、回動用ベルト128が掛け渡されて、モータ側プーリ127の回動に対してスプライン側プーリ125が連動して回動するようになっている。
【0043】
スプライン軸123の下端はブロック129に回動自在に軸支され、このブロック129にはボールネジ120のナット121が固定されている。さらに、前記ボールネジ120には、自動分析装置10のフレームに固定された上下動用ステッピングモータ40Aの回転軸が直接連結されており、ボールネジ120が回転することにより、ナット121が上下運動し、それに伴ってブロック129が上下運動するようになっている。
【0044】
以上、試薬アーム102の駆動装置について説明した。次に、ステッピングモータ40、及び、ステッピングモータ40の駆動制御装置について図3及び図4を参照して説明する。図3はステッピングモータのステータとコイルを概念的に示した図、図4はステッピングモータ40の駆動制御装置のブロック図である。なお、以下に、2相式のPM形のステッピングモータ40を一例として説明するが、ステッピングモータ40については、2相式、及び、PM形に限定するものではない。
【0045】
ステッピングモータ40は、分注アームに連動するロータ41と、ステータ42と、ステータ42に設けられ、供給される電流により励磁される複数のコイル43とを有する。
【0046】
ロータ41には永久磁石が設けられている。ステータ42には、ロータ41の回転方向に沿って4つポールが90°間隔で設けられている。0°、90°、180°、270°の位置にそれぞれ設けられたポール1〜4、及び、ポール1〜4に巻かれたコイル43A〜43B’を図4(a)に示す。なお、図4(a)では、各コイルが各ポールに巻かれているように示したが、実際は、以下に示すように、コイル43A〜43B’は巻かれている。
【0047】
ロータ41の回転中心に互いに向き合う0°のポール1と180°のポール3に1本の電線であるコイル43Aが巻かれ、さらに、1本の電線であるコイル43A’が巻かれている。コイル43Aとコイル43A’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、コイル43Aとコイル43A’は、共通の端子COMを有している。ポール1とポール3にそれぞれ巻かれたコイル43A、及び、コイル43A’を図4(b)に示す。
【0048】
同様に、ロータ41の回転中心に互いに向き合う90°のポール2と270°のポール4に1本の電線であるコイル43Bが巻かれ、さらに、1本の電線であるコイル43B’が巻かれている。コイル43Bとコイル43B’は、それぞれに供給された電流が互いに逆方向に流れるようになっている。また、コイル43Bとコイル43B’は、共通の端子COMを有している。なお、図4(b)に示すコイル43A、及び、コイル43A’と同様に、コイル43B、及び、コイル43B’もポール2とポール4にそれぞれ巻かれている。
【0049】
ステッピングモータ40の駆動制御装置は、電流を供給する対象のコイルを切り換える
駆動手段50と、駆動手段50に電流を供給する電源51と、コイルに対する電流の供給を制御する制御手段52とを有している。
【0050】
駆動手段50は、例えば、アレイ上に並べたセルと配線用素子とにより構成されたFPGA(Field Programmable Gate Array)を有している。なお、FPGAを概念的に表したスイッチ群を図3に示す。
【0051】
コイル43A、43A’は、共に端子COMを介して電源51の正極に接続されている。コイル43Aの他方の端子INAは、スイッチ50Aを介して電源51の負極に接続されている。同様に、コイル43A’の他方の端子INA−は、スイッチ50A’を介して電源51の負極に接続されている。
【0052】
また、コイル43B、43B’は、共に端子COMを介して電源51の正極に接続されている。コイル43Bの他方の端子INBは、スイッチ50Bを介して電源51の負極に接続されている。同様に、コイル43B’の他方の端子INB−は、スイッチ50B’を介して電源51の負極に接続されている。
【0053】
次に、反応庫300の内部温度を所定温度に上昇及び維持する構成について図3を参照して説明する。
【0054】
自動分析装置10は、ヒータ62、スイッチ62A及び温度検出手段63を有している。ヒータ62の一端は、電源51の正極に接続され、ヒータ62の他端は、スイッチ62Aを介して電源51の負極に接続されている。制御手段52は、始動スイッチ60がオンし、駆動手段50に対して電源51が投入されると、温度検出手段63の検出信号を受けて、反応庫300の内部温度が所定温度より低いと判断した場合にスイッチ62Aをオンの状態にし、反応庫300の内部温度が所定温度に達したと判断した場合にスイッチ62Aをオフの状態にする。駆動手段50に対して電源51が投入されてから反応庫300の内部温度が所定温度に達し、反応溶液の成分量測定が可能になるまでのアイドリング期間中、制御手段52は、上記のようにスイッチ62Aを制御する。
【0055】
アイドリング期間が経過した後、制御手段52は、温度検出手段63の検出信号を受けて、反応庫300の内部温度が所定温度より低いと判断した場合にスイッチ62Aをオンの状態にし、反応庫300の内部温度が所定温度に達したと判断した場合にスイッチ62Aをオフの状態にする。
【0056】
次に、自動分析装置10の一連の動作について、図5及び図6を参照して説明する。図5は、分注プローブの保守点検時のコイルの励磁状態を示す図、図6は、励磁信号のタイミングチャートである。なお、構成要素の駆動装置について、試薬アーム102の駆動装置を代表して説明し、他の構成要素の駆動装置の説明を省略する。
【0057】
先ず、自動分析装置10の立ち上げ時に、始動スイッチ60をオンし、駆動手段50に対して電源51を投入すると、制御手段52が、4つのスイッチ50A〜50B’のいずれもオフの状態にし、コイル43A〜43B’の各端子INA〜INB’の電圧が全てHレベルとなる。同じく、端子COMの電圧がHレベルであるため、コイル43A〜43B’のいずれにも電流が供給されず、無励磁状態(図5に示すコイルの無励磁状態)となる。
【0058】
それにより、ステータ42のポール1〜4は、ロータ41のN極又はS極を引き込まず、ロータ41を保持しない。例えば、試薬アーム102を手操作で容易に手前側(作業者側)に移動して、試薬プローブ103の保守点検等を容易に行うことが可能となる。4つのコイル43A〜43B’のいずれも無励磁状態としたので、無駄な電力を消費させずに済む。
【0059】
なお、駆動手段50に対して電源51を投入した後に、試薬プローブ103の保守点検等を行う場合、試薬アーム102がいずれの位置にあっても、ステッピングモータのコイルのいずれも無励磁状態としたが、試薬アーム102を予め定められた位置(例えば、待機位置や初期位置)に移動させてから、ステッピングモータのコイルのいずれも無励磁状態としても良い。
【0060】
また、自動分析装置10の立ち上げ時に、始動スイッチ60をオンし、ヒータ62に対して電源51を投入すると、制御手段52が、温度検出手段63の検出信号を受け、反応庫300の内部温度が所定温度より低いと判断した場合、スイッチ62Aをオンの状態にし、ヒータ62に電流を供給し、反応庫300の内部温度が所定温度に達したと判断した場合、スイッチ62Aをオフの状態にし、ヒータ62に対する電流の供給を停止する。
【0061】
電源51を投入してから反応庫300の内部温度が所定温度に達するまでのアイドリング期間中、ヒータ62は、電流を供給され続けるため、反応庫300の内部温度を所定温度に連続的に上昇させる。それにより、反応庫300の内部温度を所定温度に上昇させるまでの時間に無駄がなく、アイドリング期間の長期化を防止することが可能となる。
【0062】
アイドリング期間を経過した後に、制御手段52は、温度検出手段63の検出信号を受け、反応庫300の内部温度が所定温度より低いと判断した場合に、スイッチ62Aをオンの状態にし、ヒータ62に電流を供給し、反応庫300の内部温度が所定温度に達したと判断した場合に、スイッチ62Aをオフの状態にし、ヒータ62に対する電流の供給を停止する。それにより、反応庫300の内部温度を所定温度に維持する。
【0063】
次に、比較例に係るステッピングモータの駆動制御装置について図5を参照して説明する。比較例に係るステッピングモータの駆動制御装置が前記実施形態と異なる点は、制御手段の構成にある。
【0064】
比較例において、自動分析装置10の立ち上げ時において、始動スイッチ60をオンし、駆動手段50に対して電源51を投入すると、制御手段(図示省略)は、予め定められたコイルを励磁する。例えば、制御手段は、スイッチ50A、50Bをオンの状態にし、スイッチ50A’、50B’をオフの状態にし、コイル43A、43Bの各端子INA、INBの電圧がLレベルとなり、端子COMの電圧がHレベルとなるため、コイル43A、43Bに電流が供給され、励磁状態(図5に示すコイルの励磁状態)となる。コイル43Aに生じた磁力により、ポール1がN極となり、また、ポール3がS極となり、ポール1のN極がロータの永久磁石のS極を引き込むと共に、ポール3のS極がロータ41の永久磁石のN極を引き込み、ロータ41を保持し、それにより、試薬アーム102を初期位置(例えば待機位置)に保持する。
【0065】
比較例においては、駆動手段50に対して電源51を投入した後に、試薬プローブ103の保守点検等を行う場合に、試薬アーム102を手操作で手前側(作業者側)に移動しようとするとき、ロータ41の保持力に抗して行うために困難を伴う。また、所定のコイルに電流を供給し続けているので、無駄な電力を消費する。
以上で、本実施形態に対する比較例についての説明を終了する。
【0066】
次に、本実施形態において、アイドリング期間経過後に行われる反応溶液の成分量の測定について説明する。反応溶液の成分量の測定については、上記したように、試薬庫用駆動部(図示省略)により試薬容器101が順番に吸引位置に搬送される。また、試料庫用駆動部(図示省略)により試料容器201が順番に吸引位置に搬送される。さらに、反応庫用駆動部(図示省略)により反応容器301が順番に吐出位置に搬送される。及び、試薬アーム102の駆動装置は、吸引位置と吐出位置との間を試薬プローブ103が移動するように試薬アーム102を回動させる。また、試料アーム202の駆動装置は、吸引位置と吐出位置との間を試料プローブ203が移動するように試料アーム202を回動させる。
【0067】
上記の試薬庫駆動部、試料庫用駆動部、反応庫用駆動部、試薬アーム102の駆動装置、及び、試料アーム202の駆動装置は、それぞれステッピングモータ及びステッピングモータの駆動制御装置を備えている。それらのステッピングモータ及びステッピングモータの駆動制御装置は、基本的に同じ構成をしている。以下、試薬アーム102の駆動装置を代表して説明し、他の駆動装置の説明を省略する。
【0068】
アイドリング期間経過後、予め定められた指示(例えば、反応溶液の成分量の測定開始指示)を受けて、制御手段52は、駆動手段50を制御し、駆動手段50は、電流を供給する対象であるコイルを切り換える。また、制御手段52は、ヒータ62のスイッチ62Aを制御し、反応庫300の内部温度を所定温度に維持する。
【0069】
駆動手段50は、電流を供給する対象であるコイル43A〜コイル43B’を切り換えることにより、ロータ41を所定方向に回転させる。2相励磁方式を基にして、駆動手段50により切り換えられるコイル43Aの端子INA〜コイル43B’の端子INB−の電圧レベルを図6に示す。
【0070】
クロック0で、制御手段52は、スイッチ50A及びスイッチ50Bをオンにし、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをL、H、L、Hにする。それにより、コイル43A及びコイル43Bに電流がそれぞれ供給され、ポール1及びポール2がN極となり、ポール3及びポール4がS極となる。ポール1がロータ41のS極を引き込み、ポール3がロータ41のN極を引き込み、ポール2がロータのN極を斥け、ポール4がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0071】
クロック1で、制御手段52は、スイッチ50Aをオンからオフに切り換え、スイッチ50A’をオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをH、L、L、Hにする。それにより、コイル43Aに電流が停止し、ポール1がS極となり、コイル43A’に電流が供給され、ポール3がN極となる。ポール2がロータ41のS極を引き込み、ポール4がロータ41のN極を引き込み、ポール3がロータのN極を斥け、ポール1がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0072】
クロック2で、制御手段52は、スイッチ50Bをオンからオフに切り換え、スイッチ50B’をオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをH、L、H、Lにする。それにより、コイル43Bに電流が停止し、ポール2がS極となり、コイル43B’に電流が供給され、ポール4がN極となる。ポール3がロータ41のS極を引き込み、ポール1がロータ41のN極を引き込み、ポール4がロータのN極を斥け、ポール2がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0073】
クロック3で、制御手段52は、スイッチ50A’をオンからオフに切り換え、スイッチ50Aをオフからオンに切り換え、駆動手段50は、コイル43A〜コイル43B’の各端子の電圧レベルをL、H、H、Lにする。それにより、コイル43A’に電流が停止し、ポール3がS極となり、コイル43Aに電流が供給され、ポール4がN極となる。ポール4がロータ41のS極を引き込み、ポール2がロータ41のN極を引き込み、ポール1がロータのN極を斥け、ポール3がロータのS極を斥ける。その結果、ロータ41が時計方向に回転する。
【0074】
上記クロック0から上記クロック3により、ロータ41が1回転する。その後、再び、クロック0に戻る。そして、クロック0からクロック3までの制御を繰り返すことによりロータ41が回転し続ける。
【0075】
試薬プローブ103が所定位置(例えば吸引位置)に移動した場合、ロータ41の回転を停止する。クロック0で、ロータ41の回転が停止したとき、コイル43A及びコイル43Bに電流がそれぞれ供給され、ポール1及びポール2がN極となり、ポール3及びポール4がS極となる。ポール1がロータ41のS極を引き込み、ポール3がロータ41のN極を引き込む。それにより、ロータ41を保持し、試薬アーム102を停止位置に保持する。
【0076】
次に、反応溶液の成分量を測定中に、例えば、試薬プローブ103の点検等を目的として、試薬アーム102を手操作で操作する場合について説明する。
【0077】
操作部61の操作による指示を受けて、制御手段52は、4つのスイッチ50A〜50B’のいずれもオフの状態にし、コイル43A〜43B’の各端子INA〜INB’の電圧が全てHレベルとなる。同じく、端子COMの電圧がHレベルであるため、コイル43A〜43B’のいずれにも電流が供給されず、無励磁状態(図5に示すコイルの無励磁状態)となる。それにより、ステータ42のポール1は、ロータ41のS極を引き込まず、ポール3は、ロータ41のN極を引き込まない。その結果、ロータ41を保持せず、例えば、試薬アーム102を手操作で容易に手前側(作業者側)に移動して、試薬プローブ103の点検等を容易に行うことが可能となる。また、制御手段52は、ヒータ62に対する電流の供給を停止しないので、反応庫300の内部温度を所定温度に維持すること可能となり、試薬プローブ103の点検後に、反応溶液の成分量の測定を即座に再開することが可能となる。
【0078】
なお、反応溶液の成分量の測定中に、試薬アーム102を手操作で移動するとき、試薬アーム102を予め定められた位置に回動させた後に、コイル43A〜43B’を無励磁状態にしても良い。予め定められた位置に回動させた後の試薬アーム102を手操作で移動するので、より安全に試薬アーム102を移動させることが可能となる。
【0079】
例えば、ロータ41の回転軸に取り付けたエンコーダ(検出手段)により、試薬アーム102の回動位置を検出する。制御手段52は、操作部61の操作による指示を受けた場合、スイッチ50A〜50B’をオン又はオフにし、駆動手段50が電流を供給する対象であるコイルを切り換え、ロータ41を所定方向に所定量だけ回転させ、試薬アーム102を予め定められた位置(例えば、待機位置)に回動させる。試薬アーム102が予め定められた位置に回動したことの信号を受けて、制御手段52は、ロータ41の回転を停止させる。
【0080】
なお、前記実施形態では、試薬アーム102の駆動装置におけるステッピングモータ40及びステッピングモータ40の駆動制御装置を代表して説明したが、これに限らず、試薬庫駆動部、試料庫用駆動部、及び、反応庫用駆動部においても、上記したステッピングモータ40及びステッピングモータ40の駆動制御装置と同様な構成にすることができる。この場合、ステッピングモータ40のロータ41を各駆動部の構成要素に連動させる。制御手段がいずれのコイルに対しても電流の供給を停止させることで、各構成要素を手操作で容易に移動させることが可能となり、無駄な電力の消費を防止することが可能となり、ヒータ62に電流を供給し続けることで、反応庫300の内部温度が連続的に所定温度まで上昇し、アイドリング期間の長期化を防止することが可能となる。また、反応溶液の成分量の測定中であっても、操作部61の操作による指示を受けて、制御手段がいずれのコイルに対しても電流の供給を停止させることで、各構成要素を手操作で容易に移動させることが可能となる。コイルに対する電流の供給を停止しても、ヒータ62に対する電流の供給を停止させないので、反応庫300の内部温度を所定温度に維持することができ、反応溶液の成分量の測定再開までの期間の長期化を防止することが可能となる。
【0081】
また、コイルに対する電流の供給を停止しても、電流供給が必要な他の構成要素に対する電流の供給を停止しないので、この点からも、反応容器の成分量の測定の開始及び再開の迅速化を図ることが可能となる。
【0082】
さらに、前記実施形態では、自動分析装置10を構成する構成要素に動力を供給する動力源として、ステッピングモータ40を代表して説明したが、ステッピングモータ40以外のモータであっても良い。例えば、ロータの検出位置に応じて直流電流の極性を切り替えるブラシレスDCモータであっても良い。ブラシレスDCモータは、パルス幅変調(PWM)方式により駆動制御される。また、一直線に長く伸びたステータに置かれたロータを、磁界の変化により直線運動させるリニアモータであっても良い。
【符号の説明】
【0083】
10 自動分析装置 100 試薬庫 101 試薬容器
102 試薬アーム 103 試薬プローブ 110 試薬庫ケース
120 ボールネジ 121 ナット 123 スプライン軸
124 回動機構 125 スプライン側プーリ 127 モータ側プーリ
128 回動用ベルト 129 ブロック
200 試料庫 201 試料容器 202 試料アーム
203 試料プローブ 300 反応庫 301 反応容器
40 ステッピングモータ 50 駆動手段 51 電源
52 制御手段 60 始動スイッチ 61 操作部 62 ヒータ
63 温度検出手段
【特許請求の範囲】
【請求項1】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、
前記自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータと、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、
試料又は試薬が入れられ、吸引位置にそれぞれ配置された分注元容器と、
所定方向に並べられ、前記所定方向上に設けられた吐出位置に順に移動する反応容器と、
前記吸引位置に配された前記各分注元容器から前記試料及び前記試薬をそれぞれ吸引し、前記吸引した前記試料及び前記試薬を前記吐出位置に移動した前記反応容器にそれぞれ吐出する分注プローブと、
前記分注プローブを前記吸引位置と前記吐出位置との間で往復移動させるように回動する分注アームと、
前記分注アームに連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを順次回転させる制御手段と、
を有する
ことを特徴とする自動分析装置。
【請求項3】
前記反応容器を収容する反応庫と、該反応庫の内部温度を温めるためのヒータと、前記反応庫の内部温度を検出するための温度検出手段とを有し、
さらに、前記制御手段は、前記電源を投入した後、前記温度検出手段の検出信号を受け、前記反応庫の内部温度が所定温度より低いと判断した場合、前記ヒータに電流を供給し、前記反応庫の内部温度が前記所定温度に達したと判断した場合、前記ヒータに対する電流の供給を停止することを特徴とする請求項1又は請求項2に記載の自動分析装置。
【請求項4】
さらに、前記制御手段は、前記反応溶液の前記成分量の測定中に、操作部の操作による指示を受けた場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させることを特徴とする請求項1から請求項3のいずれかに記載の自動分析装置。
【請求項5】
前記分注アームの回動位置を検出する検出手段を有し、
さらに、前記制御手段は、前記操作部の操作による指示を受けた場合、前記検出手段の検出を基に前記分注アームが予め定められた位置にないと判断したとき、前記ロータを回転させて、前記分注アームを前記予め定められた位置に回動させるように前記駆動手段を制御する
ことを特徴とする請求項4に記載の自動分析装置。
【請求項6】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置に用いられ、該自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータの駆動制御装置において、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、
を有する
ことを特徴とするモータの駆動制御装置。
【請求項1】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、
前記自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータと、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、
を有する
ことを特徴とする自動分析装置。
【請求項2】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置において、
試料又は試薬が入れられ、吸引位置にそれぞれ配置された分注元容器と、
所定方向に並べられ、前記所定方向上に設けられた吐出位置に順に移動する反応容器と、
前記吸引位置に配された前記各分注元容器から前記試料及び前記試薬をそれぞれ吸引し、前記吸引した前記試料及び前記試薬を前記吐出位置に移動した前記反応容器にそれぞれ吐出する分注プローブと、
前記分注プローブを前記吸引位置と前記吐出位置との間で往復移動させるように回動する分注アームと、
前記分注アームに連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するステッピングモータと、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを順次回転させる制御手段と、
を有する
ことを特徴とする自動分析装置。
【請求項3】
前記反応容器を収容する反応庫と、該反応庫の内部温度を温めるためのヒータと、前記反応庫の内部温度を検出するための温度検出手段とを有し、
さらに、前記制御手段は、前記電源を投入した後、前記温度検出手段の検出信号を受け、前記反応庫の内部温度が所定温度より低いと判断した場合、前記ヒータに電流を供給し、前記反応庫の内部温度が前記所定温度に達したと判断した場合、前記ヒータに対する電流の供給を停止することを特徴とする請求項1又は請求項2に記載の自動分析装置。
【請求項4】
さらに、前記制御手段は、前記反応溶液の前記成分量の測定中に、操作部の操作による指示を受けた場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させることを特徴とする請求項1から請求項3のいずれかに記載の自動分析装置。
【請求項5】
前記分注アームの回動位置を検出する検出手段を有し、
さらに、前記制御手段は、前記操作部の操作による指示を受けた場合、前記検出手段の検出を基に前記分注アームが予め定められた位置にないと判断したとき、前記ロータを回転させて、前記分注アームを前記予め定められた位置に回動させるように前記駆動手段を制御する
ことを特徴とする請求項4に記載の自動分析装置。
【請求項6】
試料及び試薬から生成された反応溶液の成分量を測定する自動分析装置に用いられ、該自動分析装置を構成する構成要素に連動するロータと、ステータと、前記ロータ又は前記ステータの一方に設けられ、供給される電流により励磁される複数のコイルとを有するモータの駆動制御装置において、
前記電流を供給する対象の前記コイルを切り換える駆動手段と、
前記駆動手段を含む前記各構成要素に前記電流を供給する電源と、
前記駆動手段に対して前記電源を投入した場合、前記複数のコイルのいずれに対しても前記電流の供給を停止させ、その後、予め定められた指示を受けた場合、前記複数のコイルに対し前記電流の供給を開始し、前記ロータを回転させる制御手段と、
を有する
ことを特徴とするモータの駆動制御装置。
【図1】


【図2】
【図3】
【図4】

【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−117862(P2011−117862A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−276183(P2009−276183)
【出願日】平成21年12月4日(2009.12.4)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月4日(2009.12.4)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【出願人】(594164531)東芝医用システムエンジニアリング株式会社 (892)
【Fターム(参考)】
[ Back to top ]