
車両用衝突防止装置

【課題】交差点等に進入するとき、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じる。
【解決手段】車両用衝突防止装置は、自車両に搭載され、他の移動体との衝突を回避するための措置を自車両側で採るようにした装置である。本装置は、広角の視野の画像を撮る広角カメラ12A,12Bと、これにより撮像された画像から移動中の移動体を抽出する手段23と、自車両が現状のまま走行を継続したときに移動体と衝突する恐れがあるか否かを判断する手段22と、衝突の恐れがあると判断されたときに衝突回避の措置を自動的に採る手段22,15〜17とを備える。
【解決手段】車両用衝突防止装置は、自車両に搭載され、他の移動体との衝突を回避するための措置を自車両側で採るようにした装置である。本装置は、広角の視野の画像を撮る広角カメラ12A,12Bと、これにより撮像された画像から移動中の移動体を抽出する手段23と、自車両が現状のまま走行を継続したときに移動体と衝突する恐れがあるか否かを判断する手段22と、衝突の恐れがあると判断されたときに衝突回避の措置を自動的に採る手段22,15〜17とを備える。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、車両用衝突防止装置に係り、とくに、他の移動体(自車両以外の車両、自転車、人など)との衝突や接触を自車両側で判断し、それを回避するための適宜な措置を自車両側で自動的に講じるようにした車両用衝突防止装置に関する。
【0002】
【従来の技術】一般に、車両が絡む衝突事故や接触事故は運転者の視界が不充分なことに起因していることが非常に多い。例えば、交差点(T字路なども含む)での、いわゆる出会い頭の衝突事故は交通事故の中でも常に一定の割合を占めている。
【0003】このため、多くの場合、交差点の角には、交差する道路の風景を反射させる広角ミラーが設置されている。また、別の対策として、車両のボンネットの先端角部にミラーを交差道路が運転席から見えるように取り付ける方法がある。交差点に接近すると、このミラーをも見ながら交差道路の様子を伺い、自車両を徐々に交差点に出していくものである。
【0004】さらに近年では、車両の先端部又は車内にその前方を撮像するカメラを取りつけ、その画像を運転席のモニタに映し出し、運転者はその画像を注視することで交差道路の様子を確認する方法も知られている。
【0005】
【発明が解決しようとする課題】しかしながら、従来の交差点での衝突防止対策のうち、交差点角に立てるミラーやボンネット先端角部に立てるミラーにあっては、いずれの場合も運転者が目線をミラーに向け、ときにはそれを凝視する必要があった。このため、優先道路へ出る場合であって徐行しているとはいっても、車両前方の障害物や車両前方左側から横切る自転車や人には注意が散漫になりがちである。
【0006】また、交差点の広角ミラーの場合、ミラー面が汚れていたり、太陽光が反射したりして、見難いこともある。また、この広角ミラーは、何らかの理由に因り、交差する道路同士を正確に写す角度に向いていないこともあるし、ときには損傷していて全く機能しないこともある。
【0007】一方、車両前方をカメラで撮像する手法の場合も、運転者は交差点にきたときにモニタを注視しなければならず、やはり車両前方への注意力がおろそかになりがちである。
【0008】また、このカメラを用いた場合、車両が交差点直前に居るときにはカメラの視野に入る交差点及びその周辺の範囲は狭く、交差する移動体が交差点まで出て来なければカメラで捉えることができないことが殆どである。つまり、カメラで移動体を捉えたときには、走行条件にも依るが、ブレーキ操作など、衝突回避に費やすことが許される時間が少ないことが非常に多い。
【0009】さらに、上述したミラーやカメラに依る方法は、何れにしても、最終的な衝突回避の措置は運転者が行う必要がある。このため、運転者が衝突の危険性を察知するのを遅れた場合、その分、衝突の可能性は高くなる。このため、装置側で何らかの衝突回避の制御を行うことが望まれていた。
【0010】本発明は、このような従来の衝突回避の手法に鑑みてなされたもので、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることを、その目的とする。
【0011】
【課題を解決するための手段】上述の目的を達成するため、本発明の車両用衝突防止装置は、自車両に搭載されるとともに、他の移動体との衝突を回避するための措置を自車両側で採るようにした車両衝突防止装置である。この装置は、この自車両の少なくとも斜め前方を含む広角の視野の画像を撮る撮像手段と、この撮像手段により撮像された画像から移動中の前記移動体を抽出する抽出手段と、この自車両が現状のまま走行を継続したときに前記移動体と衝突する恐れがあるか否かを判断する判断手段と、この判断手段より衝突の恐れがあると判断されたときに前記措置を自動的に採る衝突回避指令手段とを備えたことを特徴とする。
【0012】好適には、前記撮像手段はカメラセンサであって、当該自車両のフロントバンパー又はその近傍に取り付けられていることである。この場合、前記カメラセンサは2個の魚眼レンズ構造のカメラであって、その各カメラを当該自車両のフロントバンパー左右の端部に取り付けることが望ましい。また、前記カメラセンサは1個の全方位センサであって、その全方位センサを当該自車両のフロントバンパーの中央部に取り付けていてもよい。
【0013】さらに好適な態様は、上述した各構成において、自車両の車速を検出する車速検出手段を備え、前記衝突回避指令手段は、前記車速検出手段により検出される車速を車速しきい値に基づき弁別する弁別手段と、この弁別結果に応じて異なる内容の前記措置を実行する実行手段とを備えることである。
【0014】この場合、前記実行手段は、前記弁別手段の弁別結果に応じて当該自車両の加速を一時的に抑制する措置、又は、当該自車両に自動的に制動を掛ける措置のうちの少なくとも一方の措置を実行する手段であってもよい。
【0015】また、前記車速しきい値は第1及び第2の車速しきい値(但し第1の車速しきい値<第2の車速しきい値)から成り、前記実行手段は、前記弁別手段により前記車速が前記第1の車速しきい値よりも小さい状態であると弁別されたときには当該自車両の加速を一時的に抑制する措置を実行し、前記前記弁別手段により前記車速が前記第1の車速しきい値以上であって前記第2の車速しきい値よりも小さい状態であると弁別されたときには当該自車両に自動的に制動を掛ける措置を実行し、さらに、前記弁別手段により前記車速が前記第2の車速しきい値以上の状態であると弁別されたときには当該自車両のドライバに警報を発する措置を実行する手段であってもよい。
【0016】これにより、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出でき、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることができる。したがって、前述した従来例に因る各種の問題を解決することができる。
【0017】
【発明の実施の形態】以下、本発明の一実施形態に係る車両用衝突防止装置を図1〜6に基づき説明する。
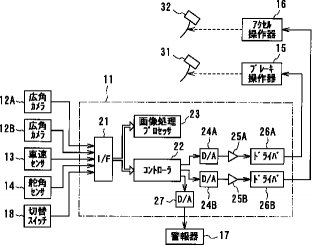
【0018】この車両用衝突防止装置は、図1及び2に示す如く、例えば運転席のシートの底部に設置された制御装置11と、この制御装置11に電気的に接続された電気系とを備える。この電気系としては、撮像手段としての2台の広角カメラ12A,12B、車速センサ13、舵角センサ14、ブレーキ操作器15、アクセル操作器16、警報器17、及び切替スイッチ18を備える。
【0019】制御装置11は、図2に示す如く、その入力側に介挿されたインタフェース21を備え、このインタフェース21の出力端にコントローラ22及び画像処理プロセッサ23が並列にバス接続されている。コントローラ22の制御出力端の一つは、D/Aコンバータ24A、アンプ25A、及びドライバ26Aを介してブレーキ操作器15に至り、他の一つは、D/Aコンバータ24B、アンプ25B、及びドライバ26Bを介してアクセル操作器16に至る。さらに、他の1つの制御出力端はD/Aコンバータ27を介して警報器17に接続されている。
【0020】上述した構成要素のうち、広角カメラ12A,12Bの夫々は魚眼レンズとCCDカメラとを組み合わせて成り、最大限180°の広角視野を有する撮像手段である。ただし、視野角が大きい部分はそれだけ歪みも大きくなるので、画像として実際に取り込む視野角は180°よりは小さく設定することが多いが(例えば70°〜160°)、通常のレンズのそれ(40°〜60°程度:焦点距離に依る)よりも広角に設定している。なお、そのような歪みを補正する回路、手段を搭載したり、そのような処理を行う場合、180°の視野角一杯まで使用してもよい。
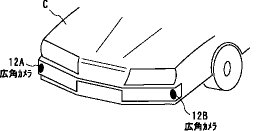
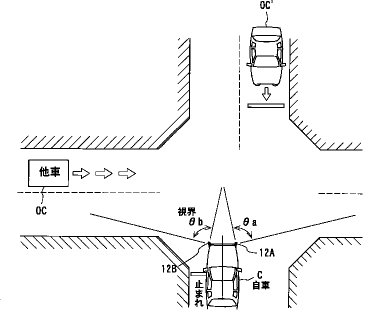
【0021】この2個の広角カメラ12A,12Bは、図3に示す如く、自車両Cの前部のバンパ両端に、そのレンズ部を若干、突出させる状態で設置されている。これにより、例えば図4に示す如く、自車両Cが優先道路との交差点に出ようとするとき、広角カメラ12A、12Bの視野θa,θbは、交差する道路(優先道路)の交差点から見てかなり遠方の位置までカバーすることが可能になる。つまり、自車両Cが交差点の少なくとも直前の位置に居るときに、この視野θa,θb内を移動する物体は、広角カメラ12A,12Bによって、交差点に入る前に捕捉されることになる。
【0022】なお、広角カメラの取付け数は2個に限定されるものではなく、3個以上であってもよく、それにより、より広い視野をカバーできる。また、広角カメラの設置位置は前側バンパの両端部に限定されるものではなく、運転手よりも前方の位置であって、なるべく左右の交差道路をその奥まった位置まで見通せるものであればよい。例えばボンネット上の先端両端部に取り付けてもよい。
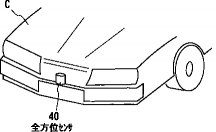
【0023】さらに、広角視野を持つ撮像手段としての広角カメラは、上述した魚眼レンズ方式のカメラに限定されるものではなく、例えば、全方位360°を撮像できるように回転双曲ミラーを用いたCCDカメラ、いわゆる全方位センサを用いてもよい。この全方位センサを用いる場合、例えば図5に示す如く、自車両Cの前部のバンパ中央部に1個、その受光部を幾分、突出させるように設ければよい。同図の符号40が全方位センサを示す。勿論、全方位センサを複数個設けることも可能である。
【0024】各広角カメラ12A(12B)から出力されるデジタル量の画像信号は、制御装置11において、インタフェース21を通して画像処理プロセッサ23に送られる。この画像処理プロセッサ23により、フレーム毎の画像データから車両、二輪車、人などの移動体を抽出する処理を以下のように種々の方法で専門に行う。
【0025】この抽出処理には、例えば、「N.Takeda,et.al., “Moving Obstacle Detection Using Residual Error of FOE Estimation," Proc.ofIROS−93, pp.1857−1865,1993」で提案されている、オプティカルフローを計算する手法を用いることができる。オプティカルフローは画面の微小領域の動きを表すベクトルであり、このオプティカルフローにより自車に接近してくる移動体を検出することができる。
【0026】上述の抽出処理は、また、“「移動カメラで撮影した動画像からの移動物体の抽出」(情報処理学会、第51回全国大会、1995:寺久保著"と同様に行ってもよい。この文献記載の技術は、画像上に注目点を複数配置し、これらの注目点を頂点とする領域の対応を時系列画像間で探索することによって、画像間でのアフィン変換パラメータを2段階に分けて求め、これにより移動物体を抽出する手法を提案している。
【0027】上述の抽出処理は、さらに、特開平7−110864号公報記載に記載されている手法に基づいて行ってもよい。具体的には、移動ベクトル場に2次元ラプラシアンフィルタを掛け、そのフィルタ出力値をしきい値処理することによって移動物体を抽出するものである。
【0028】なお、上述したいくつかのタイプの手法を組み合わせて実行することもできる。
【0029】一方、車速センサ13は車軸の回転数などに基づく車速に応じた信号を、インタフェース21を介してデジタル量の信号形態で、コントローラ22に出力する。舵角センサ14はハンドルの切り角に基づく舵角に応じた信号を、インタフェース21を介してデジタル量の信号形態で、コントローラ22に出力する。
【0030】また、切替スイッチ18は、本衝突防止装置の機能を搭乗者が手動で任意に禁止できるようにした指令手段であって、例えばオン・オフスイッチで構成される。この切替スイッチ18に対するオン操作はこの衝突防止装置による防止機能を許容し、反対に、オフ操作はその防止機能を禁止することに相当させている。このスイッチ信号はコントローラ22に与えられ、後述する制御で参照される。
【0031】コントローラ22は、図示しないが、CPU(中央処理装置)、ROM、RAMなどの必要要素を備えたコンピュータで構成される。コントローラ22は、画像処理プロセッサ23で処理された移動物体の抽出データ、並びに、車速センサ13及び舵角センサ14の検出信号に基づき、後述する図6に示す如く衝突防止のための制御を行うようになっている。
【0032】このコントローラ22による処理の結果、衝突回避のための措置が必要と判断されたときには、コントローラ22から制御信号がブレーキ操作器15、アクセル操作器16、又は警報器17に出力される。
【0033】ブレーキ操作器15に出力される制御信号は、ブレーキ31を自動的に掛ける操作を指令するもので、運転者がこのブレーキ31を踏み込むか否かに関わり無く、この装置が自動的に制動を指令するようになっている。
【0034】またアクセル操作器16に出力される制御信号は、アクセル32の運転者による踏み込みを一時的に禁止(抑制)させるためのもので、この制御が発令される、運転者がアクセル32を踏み込んでも加速できないか、それ以上踏み込めないようになっている。
【0035】さらに警報器17に出力される制御信号は、警報を発令させるための信号である。
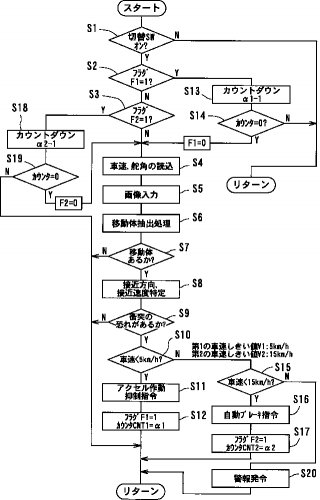
【0036】次に、コントローラ22により実行される図6の処理ルーチンを中心に、本実施形態の作用効果を説明する。同図の処理ルーチンは一定時間Δt(例えば20msec)毎のタイマ割込み処理として実行される。
【0037】コントローラ22は、Δt時間毎に図6の処理ルーチンに入る。この処理ルーチンを開始すると、まず、切替スイッチ18のスイッチ信号を読み込み、本衝突防止装置を作動させてよいか否かを判断する。この判断がNOの場合は、そのまま何も処理せずにメインルーチンに戻るので、これにより、本衝突防止装置の機能が効かない状態になる。反対にYESの判断のときは、ステップS2以降の処理に移行するので、本衝突防止装置の機能が発揮される状態となる。この機能の有効、無効の選択は運転者などの任意選択事項である。
【0038】この衝突防止機能が有効に選択されている場合、コントローラ22は後述するフラグF1,F2が立っているか否か(F1,F2=1か否か)を判断する(ステップS2,S3)。
【0039】フラグF1,F2が共に降ろされている(F1,F2=0)の場合、コントローラ22はその時点の車速及び舵角を夫々のセンサ13,14から読み込み、一時記憶する(ステップS4)。次いで、画像プロセッサ23に、広角カメラ12A,12Bから、その時点の画像データを入力させ、例えば各カメラの画像毎に、前回入力のフレームの画像データを用いて、画像中の移動体の抽出処理を周知の適宜な手法で実行させる(ステップS5,S6)。
【0040】次いで、コントローラ22は、画像処理プロセッサ23による移動体の抽出結果を受けて、移動体が存在するか否かを判断する(ステップS7)。この判断がNO、すなわち移動体が画像中に存在しないと認識した場合、そのままメインルーチンに戻る。
【0041】反対に、ステップS7でYESと判断したときは、さらに、その移動体の接近方向及び接近速度を特定し、この移動体が自車両Cと衝突する恐れがあるか否かを、自車両の車速及び舵角(すなわち走行方向)を考慮しながら判断する(ステップS8,S9)。
【0042】例えば交差点において、図4に示す如く、他車OCが左方向から進んできており、自車両Cも何がしかの速度で交差点にそのまま入った場合、衝突する恐れが生じる。ただし、ここで言及している「衝突の恐れ」はあくまで他車OC及び自車両Cの速度及び走行方向を所定のアルゴリズムの元に、ある時点で処理した結果であって、本実施形態では、衝突の恐れが「有る」、「無い」の2値情報で表現される。どの程度の衝突の確率の場合に「衝突の恐れ有り」又は「衝突の恐れ無し」にするかはアルゴリズムに依る。
【0043】ステップS9の判断において、移動体を発見した場合であっても、その移動方向や移動速度が自車両Cの走行に影響しないと見なされる場合、その時点では「衝突の恐れ無し」と判断される。例えば、図4に示す如く、交差点に向かって走行している交差道路上の他車OCの速度が遅く、自車量Cがそのまま直進しても問題無い場合や、交差点反対側から自車両Cに向かって直進して来る対向車線上の他車OC´の場合は「衝突の恐れ無し」と判断される。しかしながら、このような状況にあっても、次回の判断時に、図4の他車OCの速度が上がっていたり、対向車線の他車OC´が右折をしようとしていた場合、その時点では「衝突の恐れ有り」と判断される可能性がある。
【0044】ステップS9の判断がYES、すなわち「衝突の恐れ有り」となった場合、その時点の自車両Cの車速値に応じて適宜な衝突防止のための措置を講ずる(ステップS10〜S20)。この措置の種類の弁別を行うため、第1の車速しきい値V1=時速5km及び第2の車速しきい値V2=時速15kmが一例として設定されている。このしきい値は任意に変更できる。
【0045】ここでの衝突防止の措置は、とくに、交差点を交差している相手道路は優先道路であって、自車両Cはその優先道路に一時停止後、徐行しながら進み出るような状況や、路地から大きな道路に出るような状況に重点を置いている。これは車両が低速状態の場合には、ブレーキやアクセルの操作に対する強制的な介入が適切な措置になり易いからである。自車両が高速の場合には、衝突防止に対する運転者の操作の影響が大であるので、かかる強制的な介入はせず、運転者に「衝突の恐れ有り」の警報を発することにする。
【0046】具体的には、コントローラ22は現在の車速<V1(時速5km)か否かを判断し、YESの場合にはアクセル作動を一時的に抑制すべく指令し、さらにフラグF1=1,カウンタCNT1=α1に設定する(ステップS10〜S12)。これにより、アクセル操作器16が機能して、運転者がアクセル32を踏み込もうとした場合であっても、それが効かない状態になる。このアクセル抑制の状態は適宜な短時間に止められもので、その抑制状態の継続期間を決めるのがフラグF1とカウンタ値α1である。
【0047】すなわち、このステップS12の後、処理は、メインルーチンに戻され、そのΔt秒後には再びステップS1に入ってくる。このため、ステップS2でYES(F1=1)と判定されると、カウンタCNT1のカウント値のカウントダウン「α1−1」が実行され、そのカウント値=0になったか否かが判断される(ステップS13,S14)。この判断は、デクリメントされるカウント値=0になるまでの期間、タイマ割込み毎に継続される。このため、F1=1、α1=5に設定すると、Δt=20msecの場合、1秒間はアクセル抑制状態が有効に機能する。したがって、この徐行状態において衝突の恐れがあっても、無理に加速されることなく、逆に僅かながらも減速されることから、かかる衝突を回避することが可能になる。
【0048】一方、ステップS10の判断でNOの場合、車速は第1のしきい値V1以上である。この場合、再度、現在の車速<V2(時速15km)か否かを判断し、YESの場合(すなわち、時速5km≦車速<15kmの場合)、自動的にブレーキを掛けるべく指令し、さらにフラグF2=1,カウンタCNT2=α2に設定する(ステップS15〜S17)。これにより、ブレーキ操作器15が機能して、運転者がブレーキを踏もうとしているか否かに関わり無く、自動的にブレーキが掛けられ、制動状態になる。この自動ブレーキ状態は適宜な短時間に止められもので、そのブレーキ状態の継続期間を決めるのがフラグF2とカウンタ値α2である。
【0049】すなわち、このステップS17の後、処理は、メインルーチンに戻され、そのΔt秒後には再びステップS1に入ってくる。このため、ステップS3でYES(F2=1)と判定されると、カウンタCN2のカウント値のカウントダウン「α2−1」が実行され、そのカウント値=0になったか否かが判断される(ステップS18,S19)。この判断は、デクリメントされるカウント値=0になるまでの期間、タイマ割込み毎に継続される。このため、α2及びΔtの値に応じて適宜な時間だけ、自動ブレーキ状態が有効になる。したがって、この徐行状態において衝突の恐れがあっても、積極的に確実に減速されることから、かかる衝突を回避することが可能になる。
【0050】さらにステップS15においてNOの判断のときは、車速が第2のしきい値V2を超えている場合である。このときは、運転者に迅速に注意を促すべく、警報器17に警報発令の指示が出される(ステップS20)。この警報はタイムリに出され、しかも、通常は運転者が前方を見ている状態で出されるので、運転者は自らの判断で減速などの適切な衝突回避措置をとり易くなる。
【0051】なお、上述した図6に示す衝突防止処理において、車速の程度を弁別するしきい値は第1、第2の2つの値に限定されるものではなく、簡単に1つのしきい値を用いる構成であってもよいし、反対に、3つ以上のしきい値を設定し、よりきめ細かく制御するようにしてもよい。また、しきい値以下の車速であっても、衝突の恐れ有りの判定になるときは、警報を併せて発令するようにしてもよい。
【0052】また、衝突回避措置としての自動ブレーキ及びアクセル抑制は、その何れか一方のみを実行するようにしてもよい。
【0053】このように本実施形態によれば、従来のカメラよりも広角の撮像手段を用いて、しかも、これを車両前部の位置に設けているので、「交差点の直前」において、交差方向の奥まって位置まで見通すことが可能になる。「交差点の直前の位置」とは、例えば、6〜8m程度の幅の道路の交差点において0〜2m程度手前に広角カメラの部分が差しかかった状況である。
【0054】このため、運転者の位置が「交差点の直前の位置」になる前に、交差する方向の道路の状況をなるべく早く検出できるので、運転者も適切な措置を講じる余裕が生まれる。しかも、そのときの車両速度が低速な場合、装置自ら衝突回避のための適切な措置を行って、運転をアシストしてくれるので、衝突回避の確実性がより高められ、安全走行に寄与可能になる。
【0055】また、交差点の広角ミラーや従来のカメラ装置のように、目線を車両前方から離す必要も無いので、前方の移動体に対する注意がミラー注視に因っておろそかになる恐れもなくなる。さらに、それら広角ミラーの汚れや太陽光反射等による影響を受けるといった不都合からも解放される。
【0056】このようにして、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出でき、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることができる。
【0057】以上の作用は、交差点などで移動する移動体が他車である場合に限られず、自転車や人であっても同様に得られる。さらに、本衝突防止装置が機能し得る場所は、交差点にも限定されず、走行中に常時作動させて、道路脇から飛び出す恐れがある子供や自転車に対しても同様の作用効果を発揮させることができる。
【0058】なお、図6に示した処理のアルゴリズムは、本発明の趣旨に沿った技術的思想を表す一例であって、このアルゴリズムはさらに各種の態様を採り得るものである。
【0059】
【発明の効果】以上説明したように、本発明の係る車両用衝突防止装置によれば、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じるので、衝突防止に大きく寄与することができる。
【図面の簡単な説明】
【図1】本発明に係る車両用衝突防止装置を示す概念的な構成図。
【図2】この衝突防止装置の電気系統の概略構成を示すブロック図。
【図3】広角カメラの取り付け位置を説明する図。
【図4】交差点における自車両と広角カメラの視野とを説明する図。
【図5】別の広角カメラの取り付け位置を説明する図。
【図6】コントローラで処理される衝突回避の処理ルーチンを示す概略フローチャート。
【符号の説明】
11 制御装置
12A,12B 広角カメラ(撮像手段)
13 車速センサ(判断手段)
14 舵角センサ(判断手段)
15 ブレーキ操作器(衝突開始指令手段)
16 アクセル操作器(衝突開始指令手段)
17 警報器(衝突開始指令手段)
22 コントローラ(判断手段、衝突回避指令手段)
23 画像処理プロセッサ(抽出手段)
40 全方位センサ(撮像手段)
【0001】
【発明の属する技術分野】本発明は、車両用衝突防止装置に係り、とくに、他の移動体(自車両以外の車両、自転車、人など)との衝突や接触を自車両側で判断し、それを回避するための適宜な措置を自車両側で自動的に講じるようにした車両用衝突防止装置に関する。
【0002】
【従来の技術】一般に、車両が絡む衝突事故や接触事故は運転者の視界が不充分なことに起因していることが非常に多い。例えば、交差点(T字路なども含む)での、いわゆる出会い頭の衝突事故は交通事故の中でも常に一定の割合を占めている。
【0003】このため、多くの場合、交差点の角には、交差する道路の風景を反射させる広角ミラーが設置されている。また、別の対策として、車両のボンネットの先端角部にミラーを交差道路が運転席から見えるように取り付ける方法がある。交差点に接近すると、このミラーをも見ながら交差道路の様子を伺い、自車両を徐々に交差点に出していくものである。
【0004】さらに近年では、車両の先端部又は車内にその前方を撮像するカメラを取りつけ、その画像を運転席のモニタに映し出し、運転者はその画像を注視することで交差道路の様子を確認する方法も知られている。
【0005】
【発明が解決しようとする課題】しかしながら、従来の交差点での衝突防止対策のうち、交差点角に立てるミラーやボンネット先端角部に立てるミラーにあっては、いずれの場合も運転者が目線をミラーに向け、ときにはそれを凝視する必要があった。このため、優先道路へ出る場合であって徐行しているとはいっても、車両前方の障害物や車両前方左側から横切る自転車や人には注意が散漫になりがちである。
【0006】また、交差点の広角ミラーの場合、ミラー面が汚れていたり、太陽光が反射したりして、見難いこともある。また、この広角ミラーは、何らかの理由に因り、交差する道路同士を正確に写す角度に向いていないこともあるし、ときには損傷していて全く機能しないこともある。
【0007】一方、車両前方をカメラで撮像する手法の場合も、運転者は交差点にきたときにモニタを注視しなければならず、やはり車両前方への注意力がおろそかになりがちである。
【0008】また、このカメラを用いた場合、車両が交差点直前に居るときにはカメラの視野に入る交差点及びその周辺の範囲は狭く、交差する移動体が交差点まで出て来なければカメラで捉えることができないことが殆どである。つまり、カメラで移動体を捉えたときには、走行条件にも依るが、ブレーキ操作など、衝突回避に費やすことが許される時間が少ないことが非常に多い。
【0009】さらに、上述したミラーやカメラに依る方法は、何れにしても、最終的な衝突回避の措置は運転者が行う必要がある。このため、運転者が衝突の危険性を察知するのを遅れた場合、その分、衝突の可能性は高くなる。このため、装置側で何らかの衝突回避の制御を行うことが望まれていた。
【0010】本発明は、このような従来の衝突回避の手法に鑑みてなされたもので、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることを、その目的とする。
【0011】
【課題を解決するための手段】上述の目的を達成するため、本発明の車両用衝突防止装置は、自車両に搭載されるとともに、他の移動体との衝突を回避するための措置を自車両側で採るようにした車両衝突防止装置である。この装置は、この自車両の少なくとも斜め前方を含む広角の視野の画像を撮る撮像手段と、この撮像手段により撮像された画像から移動中の前記移動体を抽出する抽出手段と、この自車両が現状のまま走行を継続したときに前記移動体と衝突する恐れがあるか否かを判断する判断手段と、この判断手段より衝突の恐れがあると判断されたときに前記措置を自動的に採る衝突回避指令手段とを備えたことを特徴とする。
【0012】好適には、前記撮像手段はカメラセンサであって、当該自車両のフロントバンパー又はその近傍に取り付けられていることである。この場合、前記カメラセンサは2個の魚眼レンズ構造のカメラであって、その各カメラを当該自車両のフロントバンパー左右の端部に取り付けることが望ましい。また、前記カメラセンサは1個の全方位センサであって、その全方位センサを当該自車両のフロントバンパーの中央部に取り付けていてもよい。
【0013】さらに好適な態様は、上述した各構成において、自車両の車速を検出する車速検出手段を備え、前記衝突回避指令手段は、前記車速検出手段により検出される車速を車速しきい値に基づき弁別する弁別手段と、この弁別結果に応じて異なる内容の前記措置を実行する実行手段とを備えることである。
【0014】この場合、前記実行手段は、前記弁別手段の弁別結果に応じて当該自車両の加速を一時的に抑制する措置、又は、当該自車両に自動的に制動を掛ける措置のうちの少なくとも一方の措置を実行する手段であってもよい。
【0015】また、前記車速しきい値は第1及び第2の車速しきい値(但し第1の車速しきい値<第2の車速しきい値)から成り、前記実行手段は、前記弁別手段により前記車速が前記第1の車速しきい値よりも小さい状態であると弁別されたときには当該自車両の加速を一時的に抑制する措置を実行し、前記前記弁別手段により前記車速が前記第1の車速しきい値以上であって前記第2の車速しきい値よりも小さい状態であると弁別されたときには当該自車両に自動的に制動を掛ける措置を実行し、さらに、前記弁別手段により前記車速が前記第2の車速しきい値以上の状態であると弁別されたときには当該自車両のドライバに警報を発する措置を実行する手段であってもよい。
【0016】これにより、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出でき、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることができる。したがって、前述した従来例に因る各種の問題を解決することができる。
【0017】
【発明の実施の形態】以下、本発明の一実施形態に係る車両用衝突防止装置を図1〜6に基づき説明する。
【0018】この車両用衝突防止装置は、図1及び2に示す如く、例えば運転席のシートの底部に設置された制御装置11と、この制御装置11に電気的に接続された電気系とを備える。この電気系としては、撮像手段としての2台の広角カメラ12A,12B、車速センサ13、舵角センサ14、ブレーキ操作器15、アクセル操作器16、警報器17、及び切替スイッチ18を備える。
【0019】制御装置11は、図2に示す如く、その入力側に介挿されたインタフェース21を備え、このインタフェース21の出力端にコントローラ22及び画像処理プロセッサ23が並列にバス接続されている。コントローラ22の制御出力端の一つは、D/Aコンバータ24A、アンプ25A、及びドライバ26Aを介してブレーキ操作器15に至り、他の一つは、D/Aコンバータ24B、アンプ25B、及びドライバ26Bを介してアクセル操作器16に至る。さらに、他の1つの制御出力端はD/Aコンバータ27を介して警報器17に接続されている。
【0020】上述した構成要素のうち、広角カメラ12A,12Bの夫々は魚眼レンズとCCDカメラとを組み合わせて成り、最大限180°の広角視野を有する撮像手段である。ただし、視野角が大きい部分はそれだけ歪みも大きくなるので、画像として実際に取り込む視野角は180°よりは小さく設定することが多いが(例えば70°〜160°)、通常のレンズのそれ(40°〜60°程度:焦点距離に依る)よりも広角に設定している。なお、そのような歪みを補正する回路、手段を搭載したり、そのような処理を行う場合、180°の視野角一杯まで使用してもよい。
【0021】この2個の広角カメラ12A,12Bは、図3に示す如く、自車両Cの前部のバンパ両端に、そのレンズ部を若干、突出させる状態で設置されている。これにより、例えば図4に示す如く、自車両Cが優先道路との交差点に出ようとするとき、広角カメラ12A、12Bの視野θa,θbは、交差する道路(優先道路)の交差点から見てかなり遠方の位置までカバーすることが可能になる。つまり、自車両Cが交差点の少なくとも直前の位置に居るときに、この視野θa,θb内を移動する物体は、広角カメラ12A,12Bによって、交差点に入る前に捕捉されることになる。
【0022】なお、広角カメラの取付け数は2個に限定されるものではなく、3個以上であってもよく、それにより、より広い視野をカバーできる。また、広角カメラの設置位置は前側バンパの両端部に限定されるものではなく、運転手よりも前方の位置であって、なるべく左右の交差道路をその奥まった位置まで見通せるものであればよい。例えばボンネット上の先端両端部に取り付けてもよい。
【0023】さらに、広角視野を持つ撮像手段としての広角カメラは、上述した魚眼レンズ方式のカメラに限定されるものではなく、例えば、全方位360°を撮像できるように回転双曲ミラーを用いたCCDカメラ、いわゆる全方位センサを用いてもよい。この全方位センサを用いる場合、例えば図5に示す如く、自車両Cの前部のバンパ中央部に1個、その受光部を幾分、突出させるように設ければよい。同図の符号40が全方位センサを示す。勿論、全方位センサを複数個設けることも可能である。
【0024】各広角カメラ12A(12B)から出力されるデジタル量の画像信号は、制御装置11において、インタフェース21を通して画像処理プロセッサ23に送られる。この画像処理プロセッサ23により、フレーム毎の画像データから車両、二輪車、人などの移動体を抽出する処理を以下のように種々の方法で専門に行う。
【0025】この抽出処理には、例えば、「N.Takeda,et.al., “Moving Obstacle Detection Using Residual Error of FOE Estimation," Proc.ofIROS−93, pp.1857−1865,1993」で提案されている、オプティカルフローを計算する手法を用いることができる。オプティカルフローは画面の微小領域の動きを表すベクトルであり、このオプティカルフローにより自車に接近してくる移動体を検出することができる。
【0026】上述の抽出処理は、また、“「移動カメラで撮影した動画像からの移動物体の抽出」(情報処理学会、第51回全国大会、1995:寺久保著"と同様に行ってもよい。この文献記載の技術は、画像上に注目点を複数配置し、これらの注目点を頂点とする領域の対応を時系列画像間で探索することによって、画像間でのアフィン変換パラメータを2段階に分けて求め、これにより移動物体を抽出する手法を提案している。
【0027】上述の抽出処理は、さらに、特開平7−110864号公報記載に記載されている手法に基づいて行ってもよい。具体的には、移動ベクトル場に2次元ラプラシアンフィルタを掛け、そのフィルタ出力値をしきい値処理することによって移動物体を抽出するものである。
【0028】なお、上述したいくつかのタイプの手法を組み合わせて実行することもできる。
【0029】一方、車速センサ13は車軸の回転数などに基づく車速に応じた信号を、インタフェース21を介してデジタル量の信号形態で、コントローラ22に出力する。舵角センサ14はハンドルの切り角に基づく舵角に応じた信号を、インタフェース21を介してデジタル量の信号形態で、コントローラ22に出力する。
【0030】また、切替スイッチ18は、本衝突防止装置の機能を搭乗者が手動で任意に禁止できるようにした指令手段であって、例えばオン・オフスイッチで構成される。この切替スイッチ18に対するオン操作はこの衝突防止装置による防止機能を許容し、反対に、オフ操作はその防止機能を禁止することに相当させている。このスイッチ信号はコントローラ22に与えられ、後述する制御で参照される。
【0031】コントローラ22は、図示しないが、CPU(中央処理装置)、ROM、RAMなどの必要要素を備えたコンピュータで構成される。コントローラ22は、画像処理プロセッサ23で処理された移動物体の抽出データ、並びに、車速センサ13及び舵角センサ14の検出信号に基づき、後述する図6に示す如く衝突防止のための制御を行うようになっている。
【0032】このコントローラ22による処理の結果、衝突回避のための措置が必要と判断されたときには、コントローラ22から制御信号がブレーキ操作器15、アクセル操作器16、又は警報器17に出力される。
【0033】ブレーキ操作器15に出力される制御信号は、ブレーキ31を自動的に掛ける操作を指令するもので、運転者がこのブレーキ31を踏み込むか否かに関わり無く、この装置が自動的に制動を指令するようになっている。
【0034】またアクセル操作器16に出力される制御信号は、アクセル32の運転者による踏み込みを一時的に禁止(抑制)させるためのもので、この制御が発令される、運転者がアクセル32を踏み込んでも加速できないか、それ以上踏み込めないようになっている。
【0035】さらに警報器17に出力される制御信号は、警報を発令させるための信号である。
【0036】次に、コントローラ22により実行される図6の処理ルーチンを中心に、本実施形態の作用効果を説明する。同図の処理ルーチンは一定時間Δt(例えば20msec)毎のタイマ割込み処理として実行される。
【0037】コントローラ22は、Δt時間毎に図6の処理ルーチンに入る。この処理ルーチンを開始すると、まず、切替スイッチ18のスイッチ信号を読み込み、本衝突防止装置を作動させてよいか否かを判断する。この判断がNOの場合は、そのまま何も処理せずにメインルーチンに戻るので、これにより、本衝突防止装置の機能が効かない状態になる。反対にYESの判断のときは、ステップS2以降の処理に移行するので、本衝突防止装置の機能が発揮される状態となる。この機能の有効、無効の選択は運転者などの任意選択事項である。
【0038】この衝突防止機能が有効に選択されている場合、コントローラ22は後述するフラグF1,F2が立っているか否か(F1,F2=1か否か)を判断する(ステップS2,S3)。
【0039】フラグF1,F2が共に降ろされている(F1,F2=0)の場合、コントローラ22はその時点の車速及び舵角を夫々のセンサ13,14から読み込み、一時記憶する(ステップS4)。次いで、画像プロセッサ23に、広角カメラ12A,12Bから、その時点の画像データを入力させ、例えば各カメラの画像毎に、前回入力のフレームの画像データを用いて、画像中の移動体の抽出処理を周知の適宜な手法で実行させる(ステップS5,S6)。
【0040】次いで、コントローラ22は、画像処理プロセッサ23による移動体の抽出結果を受けて、移動体が存在するか否かを判断する(ステップS7)。この判断がNO、すなわち移動体が画像中に存在しないと認識した場合、そのままメインルーチンに戻る。
【0041】反対に、ステップS7でYESと判断したときは、さらに、その移動体の接近方向及び接近速度を特定し、この移動体が自車両Cと衝突する恐れがあるか否かを、自車両の車速及び舵角(すなわち走行方向)を考慮しながら判断する(ステップS8,S9)。
【0042】例えば交差点において、図4に示す如く、他車OCが左方向から進んできており、自車両Cも何がしかの速度で交差点にそのまま入った場合、衝突する恐れが生じる。ただし、ここで言及している「衝突の恐れ」はあくまで他車OC及び自車両Cの速度及び走行方向を所定のアルゴリズムの元に、ある時点で処理した結果であって、本実施形態では、衝突の恐れが「有る」、「無い」の2値情報で表現される。どの程度の衝突の確率の場合に「衝突の恐れ有り」又は「衝突の恐れ無し」にするかはアルゴリズムに依る。
【0043】ステップS9の判断において、移動体を発見した場合であっても、その移動方向や移動速度が自車両Cの走行に影響しないと見なされる場合、その時点では「衝突の恐れ無し」と判断される。例えば、図4に示す如く、交差点に向かって走行している交差道路上の他車OCの速度が遅く、自車量Cがそのまま直進しても問題無い場合や、交差点反対側から自車両Cに向かって直進して来る対向車線上の他車OC´の場合は「衝突の恐れ無し」と判断される。しかしながら、このような状況にあっても、次回の判断時に、図4の他車OCの速度が上がっていたり、対向車線の他車OC´が右折をしようとしていた場合、その時点では「衝突の恐れ有り」と判断される可能性がある。
【0044】ステップS9の判断がYES、すなわち「衝突の恐れ有り」となった場合、その時点の自車両Cの車速値に応じて適宜な衝突防止のための措置を講ずる(ステップS10〜S20)。この措置の種類の弁別を行うため、第1の車速しきい値V1=時速5km及び第2の車速しきい値V2=時速15kmが一例として設定されている。このしきい値は任意に変更できる。
【0045】ここでの衝突防止の措置は、とくに、交差点を交差している相手道路は優先道路であって、自車両Cはその優先道路に一時停止後、徐行しながら進み出るような状況や、路地から大きな道路に出るような状況に重点を置いている。これは車両が低速状態の場合には、ブレーキやアクセルの操作に対する強制的な介入が適切な措置になり易いからである。自車両が高速の場合には、衝突防止に対する運転者の操作の影響が大であるので、かかる強制的な介入はせず、運転者に「衝突の恐れ有り」の警報を発することにする。
【0046】具体的には、コントローラ22は現在の車速<V1(時速5km)か否かを判断し、YESの場合にはアクセル作動を一時的に抑制すべく指令し、さらにフラグF1=1,カウンタCNT1=α1に設定する(ステップS10〜S12)。これにより、アクセル操作器16が機能して、運転者がアクセル32を踏み込もうとした場合であっても、それが効かない状態になる。このアクセル抑制の状態は適宜な短時間に止められもので、その抑制状態の継続期間を決めるのがフラグF1とカウンタ値α1である。
【0047】すなわち、このステップS12の後、処理は、メインルーチンに戻され、そのΔt秒後には再びステップS1に入ってくる。このため、ステップS2でYES(F1=1)と判定されると、カウンタCNT1のカウント値のカウントダウン「α1−1」が実行され、そのカウント値=0になったか否かが判断される(ステップS13,S14)。この判断は、デクリメントされるカウント値=0になるまでの期間、タイマ割込み毎に継続される。このため、F1=1、α1=5に設定すると、Δt=20msecの場合、1秒間はアクセル抑制状態が有効に機能する。したがって、この徐行状態において衝突の恐れがあっても、無理に加速されることなく、逆に僅かながらも減速されることから、かかる衝突を回避することが可能になる。
【0048】一方、ステップS10の判断でNOの場合、車速は第1のしきい値V1以上である。この場合、再度、現在の車速<V2(時速15km)か否かを判断し、YESの場合(すなわち、時速5km≦車速<15kmの場合)、自動的にブレーキを掛けるべく指令し、さらにフラグF2=1,カウンタCNT2=α2に設定する(ステップS15〜S17)。これにより、ブレーキ操作器15が機能して、運転者がブレーキを踏もうとしているか否かに関わり無く、自動的にブレーキが掛けられ、制動状態になる。この自動ブレーキ状態は適宜な短時間に止められもので、そのブレーキ状態の継続期間を決めるのがフラグF2とカウンタ値α2である。
【0049】すなわち、このステップS17の後、処理は、メインルーチンに戻され、そのΔt秒後には再びステップS1に入ってくる。このため、ステップS3でYES(F2=1)と判定されると、カウンタCN2のカウント値のカウントダウン「α2−1」が実行され、そのカウント値=0になったか否かが判断される(ステップS18,S19)。この判断は、デクリメントされるカウント値=0になるまでの期間、タイマ割込み毎に継続される。このため、α2及びΔtの値に応じて適宜な時間だけ、自動ブレーキ状態が有効になる。したがって、この徐行状態において衝突の恐れがあっても、積極的に確実に減速されることから、かかる衝突を回避することが可能になる。
【0050】さらにステップS15においてNOの判断のときは、車速が第2のしきい値V2を超えている場合である。このときは、運転者に迅速に注意を促すべく、警報器17に警報発令の指示が出される(ステップS20)。この警報はタイムリに出され、しかも、通常は運転者が前方を見ている状態で出されるので、運転者は自らの判断で減速などの適切な衝突回避措置をとり易くなる。
【0051】なお、上述した図6に示す衝突防止処理において、車速の程度を弁別するしきい値は第1、第2の2つの値に限定されるものではなく、簡単に1つのしきい値を用いる構成であってもよいし、反対に、3つ以上のしきい値を設定し、よりきめ細かく制御するようにしてもよい。また、しきい値以下の車速であっても、衝突の恐れ有りの判定になるときは、警報を併せて発令するようにしてもよい。
【0052】また、衝突回避措置としての自動ブレーキ及びアクセル抑制は、その何れか一方のみを実行するようにしてもよい。
【0053】このように本実施形態によれば、従来のカメラよりも広角の撮像手段を用いて、しかも、これを車両前部の位置に設けているので、「交差点の直前」において、交差方向の奥まって位置まで見通すことが可能になる。「交差点の直前の位置」とは、例えば、6〜8m程度の幅の道路の交差点において0〜2m程度手前に広角カメラの部分が差しかかった状況である。
【0054】このため、運転者の位置が「交差点の直前の位置」になる前に、交差する方向の道路の状況をなるべく早く検出できるので、運転者も適切な措置を講じる余裕が生まれる。しかも、そのときの車両速度が低速な場合、装置自ら衝突回避のための適切な措置を行って、運転をアシストしてくれるので、衝突回避の確実性がより高められ、安全走行に寄与可能になる。
【0055】また、交差点の広角ミラーや従来のカメラ装置のように、目線を車両前方から離す必要も無いので、前方の移動体に対する注意がミラー注視に因っておろそかになる恐れもなくなる。さらに、それら広角ミラーの汚れや太陽光反射等による影響を受けるといった不都合からも解放される。
【0056】このようにして、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出でき、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じることができる。
【0057】以上の作用は、交差点などで移動する移動体が他車である場合に限られず、自転車や人であっても同様に得られる。さらに、本衝突防止装置が機能し得る場所は、交差点にも限定されず、走行中に常時作動させて、道路脇から飛び出す恐れがある子供や自転車に対しても同様の作用効果を発揮させることができる。
【0058】なお、図6に示した処理のアルゴリズムは、本発明の趣旨に沿った技術的思想を表す一例であって、このアルゴリズムはさらに各種の態様を採り得るものである。
【0059】
【発明の効果】以上説明したように、本発明の係る車両用衝突防止装置によれば、交差点等に進入するときに、交差する道路の交差点から奥まった位置までその状況を自車両から事前検出し、この検出結果に応じて衝突回避のための適切な措置を自車両側で自動的に講じるので、衝突防止に大きく寄与することができる。
【図面の簡単な説明】
【図1】本発明に係る車両用衝突防止装置を示す概念的な構成図。
【図2】この衝突防止装置の電気系統の概略構成を示すブロック図。
【図3】広角カメラの取り付け位置を説明する図。
【図4】交差点における自車両と広角カメラの視野とを説明する図。
【図5】別の広角カメラの取り付け位置を説明する図。
【図6】コントローラで処理される衝突回避の処理ルーチンを示す概略フローチャート。
【符号の説明】
11 制御装置
12A,12B 広角カメラ(撮像手段)
13 車速センサ(判断手段)
14 舵角センサ(判断手段)
15 ブレーキ操作器(衝突開始指令手段)
16 アクセル操作器(衝突開始指令手段)
17 警報器(衝突開始指令手段)
22 コントローラ(判断手段、衝突回避指令手段)
23 画像処理プロセッサ(抽出手段)
40 全方位センサ(撮像手段)
【特許請求の範囲】
【請求項1】 自車両に搭載されるとともに、他の移動体との衝突を回避するための措置を自車両側で採るようにした車両衝突防止装置において、この自車両の少なくとも斜め前方を含む広角の視野の画像を撮る撮像手段と、この撮像手段により撮像された画像から移動中の前記移動体を抽出する抽出手段と、この自車両が現状のまま走行を継続したときに前記移動体と衝突する恐れがあるか否かを判断する判断手段と、この判断手段より衝突の恐れがあると判断されたときに前記措置を自動的に採る衝突回避指令手段とを備えたことを特徴とする車両用衝突防止装置。
【請求項2】 請求項1記載の車両用衝突防止装置において、前記撮像手段はカメラセンサであって、当該自車両のフロントバンパー又はその近傍に取り付けられている車両用衝突防止装置。
【請求項3】 請求項2記載の車両用衝突防止装置において、前記カメラセンサは2個の魚眼レンズ構造のカメラであって、その各カメラを当該自車両のフロントバンパー左右の端部に取り付けた車両用衝突防止装置。
【請求項4】 請求項2記載の車両用衝突防止装置において、前記カメラセンサは1個の全方位センサであって、その全方位センサを当該自車両のフロントバンパーの中央部に取り付けた車両用衝突防止装置。
【請求項5】 請求項1乃至4の何れか一項記載の車両用衝突防止装置において、当該自車両の車速を検出する車速検出手段を備え、前記衝突回避指令手段は、前記車速検出手段により検出される車速を車速しきい値に基づき弁別する弁別手段と、この弁別結果に応じて異なる内容の前記措置を実行する実行手段とを備えた車両用衝突防止装置。
【請求項6】 請求項5記載の車両用衝突防止装置において、前記実行手段は、前記弁別手段の弁別結果に応じて当該自車両の加速を一時的に抑制する措置、又は、当該自車両に自動的に制動を掛ける措置のうちの少なくとも一方の措置を実行する手段である車両用衝突防止装置。
【請求項7】 請求項5記載の車両用衝突防止装置において、前記車速しきい値は第1及び第2の車速しきい値(但し第1の車速しきい値<第2の車速しきい値)から成り、前記実行手段は、前記弁別手段により前記車速が前記第1の車速しきい値よりも小さい状態であると弁別されたときには当該自車両の加速を一時的に抑制する措置を実行し、前記前記弁別手段により前記車速が前記第1の車速しきい値以上であって前記第2の車速しきい値よりも小さい状態であると弁別されたときには当該自車両に自動的に制動を掛ける措置を実行し、さらに、前記弁別手段により前記車速が前記第2の車速しきい値以上の状態であると弁別されたときには当該自車両のドライバに警報を発する措置を実行する手段である車両用衝突防止装置。
【請求項1】 自車両に搭載されるとともに、他の移動体との衝突を回避するための措置を自車両側で採るようにした車両衝突防止装置において、この自車両の少なくとも斜め前方を含む広角の視野の画像を撮る撮像手段と、この撮像手段により撮像された画像から移動中の前記移動体を抽出する抽出手段と、この自車両が現状のまま走行を継続したときに前記移動体と衝突する恐れがあるか否かを判断する判断手段と、この判断手段より衝突の恐れがあると判断されたときに前記措置を自動的に採る衝突回避指令手段とを備えたことを特徴とする車両用衝突防止装置。
【請求項2】 請求項1記載の車両用衝突防止装置において、前記撮像手段はカメラセンサであって、当該自車両のフロントバンパー又はその近傍に取り付けられている車両用衝突防止装置。
【請求項3】 請求項2記載の車両用衝突防止装置において、前記カメラセンサは2個の魚眼レンズ構造のカメラであって、その各カメラを当該自車両のフロントバンパー左右の端部に取り付けた車両用衝突防止装置。
【請求項4】 請求項2記載の車両用衝突防止装置において、前記カメラセンサは1個の全方位センサであって、その全方位センサを当該自車両のフロントバンパーの中央部に取り付けた車両用衝突防止装置。
【請求項5】 請求項1乃至4の何れか一項記載の車両用衝突防止装置において、当該自車両の車速を検出する車速検出手段を備え、前記衝突回避指令手段は、前記車速検出手段により検出される車速を車速しきい値に基づき弁別する弁別手段と、この弁別結果に応じて異なる内容の前記措置を実行する実行手段とを備えた車両用衝突防止装置。
【請求項6】 請求項5記載の車両用衝突防止装置において、前記実行手段は、前記弁別手段の弁別結果に応じて当該自車両の加速を一時的に抑制する措置、又は、当該自車両に自動的に制動を掛ける措置のうちの少なくとも一方の措置を実行する手段である車両用衝突防止装置。
【請求項7】 請求項5記載の車両用衝突防止装置において、前記車速しきい値は第1及び第2の車速しきい値(但し第1の車速しきい値<第2の車速しきい値)から成り、前記実行手段は、前記弁別手段により前記車速が前記第1の車速しきい値よりも小さい状態であると弁別されたときには当該自車両の加速を一時的に抑制する措置を実行し、前記前記弁別手段により前記車速が前記第1の車速しきい値以上であって前記第2の車速しきい値よりも小さい状態であると弁別されたときには当該自車両に自動的に制動を掛ける措置を実行し、さらに、前記弁別手段により前記車速が前記第2の車速しきい値以上の状態であると弁別されたときには当該自車両のドライバに警報を発する措置を実行する手段である車両用衝突防止装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2001−101592(P2001−101592A)
【公開日】平成13年4月13日(2001.4.13)
【国際特許分類】
【出願番号】特願平11−281926
【出願日】平成11年10月1日(1999.10.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成13年4月13日(2001.4.13)
【国際特許分類】
【出願日】平成11年10月1日(1999.10.1)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]