
電力変換装置

【課題】指令制御装置の出力した駆動指令信号に関連する回路が誤動作した場合でもアーム短絡を抑止でき、かつ誤動作したことを検知する電力変換回路を提供する。
【解決手段】直列接続された第1、第2スイッチング素子と、前記スイッチング素子を駆動制御する第1、第2駆動制御装置と、駆動制御装置に指令を与える指令制御装置からなる電力変換装置であって、前記駆動制御装置は、指令制御装置の指令信号と他の駆動制御装置の出力するインターロック信号を演算する駆動回路と、スイッチング素子の導通状態を判定する状態判定回路と、指令信号と他の駆動制御装置のインターロック信号と状態判定回路の出力の少なくとも1つを入力するインターロック信号生成回路と、前記指令信号とインターロック信号と状態判定回路の出力の少なくとも2つを入力するフィードバック信号生成回路とを備え、フィードバック信号生成回路の出力を指令制御装置に供給する。
【解決手段】直列接続された第1、第2スイッチング素子と、前記スイッチング素子を駆動制御する第1、第2駆動制御装置と、駆動制御装置に指令を与える指令制御装置からなる電力変換装置であって、前記駆動制御装置は、指令制御装置の指令信号と他の駆動制御装置の出力するインターロック信号を演算する駆動回路と、スイッチング素子の導通状態を判定する状態判定回路と、指令信号と他の駆動制御装置のインターロック信号と状態判定回路の出力の少なくとも1つを入力するインターロック信号生成回路と、前記指令信号とインターロック信号と状態判定回路の出力の少なくとも2つを入力するフィードバック信号生成回路とを備え、フィードバック信号生成回路の出力を指令制御装置に供給する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、直流電力を交流電力に、あるいは交流電力を直流電力に変換する電力変換装置に係り、特に電源に直列接続された複数のスイッチング素子のアーム短絡防止機能を有する駆動制御装置を備えた電力変換装置に関する。
【背景技術】
【0002】
直流電力を交流電力に、あるいは交流電力を直流電力に変換する手段として、スイッチング素子を用いた電力変換装置が家電品から鉄道車両まで幅広い分野で使用されている。
電力変換装置は、一般的には、直流電圧に対してスイッチング素子を2個直列に接続し、2個のスイッチング素子の間より負荷出力線を取り出すブリッジ構造をとり、さらにこのブリッジを複数組、たとえば三相インバータの場合は3組備えて構成されている。
通常、直流電圧の正極側と負荷出力線の間(上アーム)のスイッチング素子と、直流電圧の負極側と負荷出力線の間(下アーム)のスイッチング素子は排他的に動作するが、何らかのトラブルによって上・下アーム両方のスイッチング素子がオン状態(いわゆるアーム短絡)になった場合、膨大な短絡電流が上・下アーム両方のスイッチング素子に流れ、装置を破壊してしまう。このようなアーム短絡を防止するため、上・下アームのスイッチング素子を駆動する駆動制御装置間でインターロックを取る技術が知られている(特許文献1〜5参照)。
【0003】
なお、特許文献1においては、上アームの駆動指令と下アームの駆動指令は排他的に動作して、上アームのみ、もしくは下アームのみが誤動作した場合には、アーム短絡が防止される技術が開示されている。
また、特許文献2においては、上アームの駆動指令と下アームの駆動指令は排他的に動作して、上アームのみ、もしくは下アームのみが誤動作した場合、さらには、上アームと下アームが同時にオンになった場合でも発振を防止し、かつアーム短絡を抑止することができる技術が開示されている。
また、特許文献3〜5には、前記したような電力変換装置に係る一般的な技術が開示されている。
また、特許文献6においては、スイッチング素子の導通状態を検出する手段を備え、さらに検出した導通状態を、絶縁手段を介して指令制御装置に伝える手段を備えて、駆動制御装置がスイッチング素子に与える駆動信号を検証する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭56−141782号公報
【特許文献2】特開平8−298786号公報
【特許文献3】特開2007−185024号公報
【特許文献4】特開2006−34077号公報
【特許文献5】特開2009−296732号公報
【特許文献6】特開2001−238432号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、所定の故障例のアーム短絡が防止されるものの、上・下アームの駆動指令が同時にオンになった場合に、高周波で発振状態となることがあり、アーム短絡を抑止することはできずに装置を破壊してしまうという問題がある(詳細は後記する図12〜図14に示す参考回路1を参照)。
また、特許文献2においては、上・下アームの駆動指令が同時にオンになった場合でも、発振を防止かつアーム短絡を抑止することができるものの、後記する所定の故障例では、先にオンした健全側のアームまでオフして再度オンしてしまうことがあり、オフ時間が短ければ過電圧によりスイッチング素子が破壊されてしまう可能性があるという問題がある(詳細は後記する図15〜図17に示す参考回路2を参照)。
また、特許文献1、特許文献2、特許文献6に開示された技術を組み合わせた場合には、絶縁回路の故障により誤動作が頻発するようになった際に、上・下アーム間でインターロック信号をやり取りすることでアーム短絡は抑止され、スイッチング素子の導通状態は正常状態に保たれるが、絶縁回路の故障を検知できず、鉄芯に渦電流損失が発生し、磁性部品の鉄損が増加するという問題がある。
【0006】
そこで、本発明はこのような問題点を解決するものであって、その目的は、指令制御装置の出力した駆動指令信号に関連する回路が誤動作した場合でもアーム短絡を抑止でき、かつ誤動作したことを検知する電力変換回路を提供することである。
【課題を解決するための手段】
【0007】
前記の目的を達成するために、各発明を以下のような構成にした。
すなわち、本発明の電力変換装置は、直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、前記第1スイッチング素子を駆動制御する第1駆動制御装置と、前記第2スイッチング素子を駆動制御する第2駆動制御装置と、前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、前記第1駆動制御装置は、前記指令制御装置の第1駆動指令信号と前記第2駆動制御装置の出力する第2インターロック信号との演算結果に基づいて前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、前記第1スイッチング素子の導通状態を判定する第1状態判定部と、前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、前記第1駆動指令信号と前記第2インターロック信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、前記第2駆動制御装置は、前記指令制御装置の第2駆動指令信号と前記第1駆動制御装置の出力する第1インターロック信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、前記第2スイッチング素子の導通状態を判定する第2状態判定部と、前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、前記第2駆動指令信号と前記第1インターロック信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備えることを特徴とする。
また、その他の手段は、発明を実施するための形態のなかで説明する。
【発明の効果】
【0008】
本発明によれば、指令制御装置の出力した駆動指令信号に関連する回路が誤動作した場合でもアーム短絡を抑止でき、かつ誤動作したことを検知する電力変換回路を提供できる。
【図面の簡単な説明】
【0009】
【図1】本発明の電力変換装置の第1実施形態の回路構成を示す図である。
【図2】本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置の回路構成の詳細を示す図である。
【図3】本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明する仮想的な回路の簡略図である。
【図4】本発明の電力変換装置の第2実施形態が健全時の動作波形を示す図である。
【図5】本発明の電力変換装置の第2実施形態において、絶縁回路が誤動作した場合の動作波形である。
【図6】本発明の電力変換装置の第2実施形態において、第1、第2スイッチング素子が点弧不良の場合の動作波形を示す図である。
【図7】本発明の電力変換装置の第2実施形態において、スイッチング素子が誤点弧した場合の動作波形を示す図である。
【図8】本発明の電力変換装置の第3実施形態における第1、第2駆動制御装置の回路構成の詳細を示す図である。
【図9】本発明の電力変換装置の第3実施形態が健全時の動作波形を示す図である。
【図10】本発明の電力変換装置の第3実施形態において、絶縁回路が誤動作した場合の動作波形を示す図である。
【図11】本発明の電力変換装置の第3実施形態において、絶縁回路が誤動作した場合のさらなる例の動作波形を示す図である。
【図12】従来の電力変換装置の参考回路1において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
【図13】従来の電力変換装置の参考回路1の動作波形を示す図である。
【図14】従来の電力変換装置の参考回路1に示す駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
【図15】従来の電力変換装置の参考回路2において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
【図16】従来の電力変換装置の参考回路2の動作波形を示す図である。
【図17】従来の電力変換装置の参考回路2に示す駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を、図面を参照して説明する。
【0011】
(第1実施形態)
本発明の電力変換装置の第1実施形態を、図1を参照して説明する。第1実施形態は本発明の電力変換装置の基本的な回路構成と機能動作を示すものである。
【0012】
《全体の概略構成》
図1は、第1実施形態の回路構成を示す図である。
図1において、第1実施形態の電力変換装置100は、直流電圧源301に直列接続された第1のスイッチング素子(以下、「第1スイッチング素子」と適宜、表記する)101と、第2のスイッチング素子(第2スイッチング素子)201と、第1スイッチング素子101を駆動する第1の駆動制御装置(第1駆動制御装置)111と、第2スイッチング素子201を駆動する第2の駆動制御装置(第2駆動制御装置)211と、第1駆動制御装置111と第2駆動制御装置211に指令を与える指令制御装置312を備えて構成される。
なお、直流電圧源301は、電力変換装置100に備えてもよいし、また電力変換装置100の外部にある直流電圧源を用いてもよい。
【0013】
《指令制御装置》
指令制御装置312からは、上アームとなる第1スイッチング素子101と下アームとなる第2スイッチング素子201を交互にオン(ON)させるための駆動信号(High、正電位)が、駆動指令信号LA1(第1駆動指令信号)と駆動指令信号LA2(第2駆動指令信号)によって第1駆動制御装置111と第2駆動制御装置211に送信される。
また、指令制御装置312は、故障判定回路(故障判定部、不図示)を備えていて、フィードバック信号LB1、LB2をそれぞれ第1駆動制御装置111と第2駆動制御装置211から受信し、ノイズなどによって、第1スイッチング素子101と第2スイッチング素子201が同時にオンして短絡電流が流れることを防止する。
なお、指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間の信号の授受は、光信号によって行われるので、次に光信号と電気信号の変換について説明する。
【0014】
《光信号と電気信号の変換》
第1駆動制御装置111には、光信号を電気信号に変換する絶縁回路(絶縁部)171(第1絶縁部)、絶縁回路173(第3絶縁部)と、電気信号を光信号に変換する絶縁回路172(第2絶縁部)、絶縁回路174(第4絶縁部)とが備えられている。
また、第2駆動制御装置211には、光信号を電気信号に変換する絶縁回路(絶縁部)278(第8絶縁部)、絶縁回路276(第6絶縁部)と、電気信号を光信号に変換する絶縁回路277(第7絶縁部)、絶縁回路275(第5絶縁部)とが備えられている。
指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間の信号の授受には、光信号(LA1、LA2、LB1、LB2)が用いられる。
また、第1駆動制御装置111と第2駆動制御装置211との間の信号の授受には、光信号(LCD、LDC)が用いられる。
これは、指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間は、電気的に隔離することと、併せて信号にノイズがのることを軽減するためである。
【0015】
指令制御装置312の出力する光信号である駆動指令信号LA1(第1駆動指令信号)は、光−電気変換回路である絶縁回路171で電気信号の駆動指令信号EA1に変換される。
また、指令制御装置312の出力する光信号である駆動指令信号LA2は、光−電気変換回路である絶縁回路278で電気信号の駆動指令信号EA2に変換される。
また、第1駆動制御装置111に備えられた後記するフィードバック信号生成回路(第1フィードバック信号生成部)131の電気信号出力であるフィードバック信号EB1は、電気−光変換回路である絶縁回路172で光信号のフィードバック信号LB1に変換される。
また、第2駆動制御装置211に備えられた後記するフィードバック信号生成回路(第1フィードバック信号生成部)231の電気信号出力であるフィードバック信号EB2は、電気−光変換回路である絶縁回路277で光信号のフィードバック信号LB2に変換される。
【0016】
また、第1駆動制御装置111に備えられた後記するインターロック信号生成回路(第1インターロック信号生成部)141の電気信号出力であるインターロック信号ED1は、電気−光変換回路である絶縁回路174で光信号のインターロック信号LDC(第1インターロック信号)に変換され、第2駆動制御装置211の光−電気変換回路である絶縁回路276で再び電気信号のインターロック信号EC2(第1インターロック信号)に変換される。
また、第2駆動制御装置211に備えられた後記するインターロック信号生成回路241の電気信号出力であるインターロック信号ED2は、電気−光変換回路である絶縁回路275で光信号のインターロック信号LCD(第2インターロック信号)に変換され、第1駆動制御装置111の光−電気変換回路である絶縁回路173で再び電気信号のインターロック信号EC1(第2インターロック信号)に変換される。
【0017】
《第1駆動制御装置》
第1駆動制御装置111は、フィルタ回路161(第1フィルタ部)と、論理積(AND)回路122および出力段パワー回路123からなる駆動回路121(第1駆動部)と、状態判定回路(図1においては「状態判定」と表記)151(第1状態判定部)と、フィードバック信号生成回路(図1においては「フィードバック信号生成」と表記)131(第1フィードバック信号生成部)と、インターロック信号生成回路(図1においては「インターロック信号生成」と表記)141(第1インターロック信号生成部)と、前記した絶縁回路171〜174と、を備えて構成される。
【0018】
フィルタ回路161は、絶縁回路173の出力するインターロック信号EC1を入力して高周波成分を除去し、論理積回路122とフィードバック信号生成回路131に出力信号を送っている。
駆動回路121に備えられた論理積回路122には、前記したフィルタ回路161の出力であるフィルタ出力信号F1と絶縁回路171の駆動指令信号EA1が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路121に備えられた出力段パワー回路123は論理積回路122の出力である制御駆動信号E1に基づいて第1スイッチング素子101を駆動する。
また、状態判定回路151は、出力段パワー回路123からの導通状態信号G1を入力して、スイッチング素子101の導通状態を判定し、導通状態判定信号H1を出力する。
【0019】
また、インターロック信号生成回路141は、絶縁回路171の駆動指令信号EA1と、絶縁回路173のインターロック信号EC1と、状態判定回路151の出力の導通状態判定信号H1を入力し、演算処理をしてインターロック信号ED1を生成して出力する
また、フィードバック信号生成回路131は、絶縁回路171の駆動指令信号EA1と、フィルタ回路161の出力であるフィルタ出力信号(第1フィルタ出力信号)F1と、状態判定回路151の出力である導通状態判定信号H1を入力し、演算処理をしてフィードバック信号EB1(第1フィードバック信号)を出力する。
なお、インターロック信号生成回路141のインターロック信号ED1は、絶縁回路174で光信号のインターロック信号LDCに変換され、第2駆動制御装置211に送られる。
また、フィードバック信号生成回路131のフィードバック信号EB1は、絶縁回路172で光信号のフィードバック信号LB1(第1フィードバック信号)に変換され、指令制御装置312に送られる。
【0020】
《第2駆動制御装置》
第2駆動制御装置211は、フィルタ回路261(第2フィルタ部)と、論理積(AND)回路222および出力段パワー回路223からなる駆動回路221(第2駆動部)と、状態判定回路251(第2状態判定部)と、フィードバック信号生成回路231(第2フィードバック信号生成部)と、インターロック信号生成回路241(第2インターロック信号生成部)と、前記した絶縁回路275〜278とを備えて構成される。
【0021】
フィルタ回路261は、絶縁回路276の出力するインターロック信号EC2を入力して高周波成分を除去し、論理積回路222とフィードバック信号生成回路231に出力信号を送っている。
駆動回路221に備えられた論理積回路222には、前記したフィルタ回路261の出力であるフィルタ出力信号F2と絶縁回路278の駆動指令信号EA2が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路221に備えられた出力段パワー回路223は論理積回路222の出力E2に基づいて第2スイッチング素子201を駆動する。
また、状態判定回路251は、出力段パワー回路223からの導通状態信号G2を入力して、スイッチング素子201の導通状態を判定し、導通状態判定信号H2を出力する。
【0022】
また、インターロック信号生成回路241は、絶縁回路278の駆動指令信号EA2と、絶縁回路276のインターロック信号EC2と、状態判定回路251の出力の導通状態判定信号H2を入力し、演算処理をしてインターロック信号ED2を生成して出力する
また、フィードバック信号生成回路231は、絶縁回路278の駆動指令信号EA2と、フィルタ回路261の出力であるフィルタ出力信号(第2フィルタ出力信号)F2と、状態判定回路251の出力である導通状態判定信号H2を入力し、演算処理をしてフィードバック信号EB2(第2フィードバック信号)を出力する。
なお、インターロック信号生成回路241のインターロック信号ED2は、絶縁回路275で光信号のインターロック信号LCDに変換され、第1駆動制御装置111に送られる。
また、フィードバック信号生成回路231のフィードバック信号EB2は、絶縁回路277で光信号のフィードバック信号LB2(第2フィードバック信号)に変換され、指令制御装置312に送られる。
【0023】
《スイッチング素子による出力駆動回路》
上アームとなるスイッチング素子101と下アームとなるスイッチング素子201は、IGBT(Insulated Gate Bipolar Transistor)によって構成されている。なお、IGBTは、逆並列に還流ダイオードを備えている、もしくはダイオードが寄生している。
スイッチング素子101とスイッチング素子201は直列に接続されていて、スイッチング素子101のコレクタは直流電圧源301の正極に接続され、スイッチング素子201のエミッタは直流電圧源301の負極に接続されている。また、スイッチング素子101とスイッチング素子201との接続点は、電力変換装置100の出力端子110となっている。
駆動制御装置111、211のそれぞれのスイッチング素子駆動信号I1、I2をそれぞれスイッチング素子101、201のゲートに入力して制御されることにより、電力変換装置100の出力駆動回路として動作する。
【0024】
《全体の機能動作》
以上の回路構成で、指令制御装置312の駆動指令信号LA1、LA2により、第1駆動制御装置111と第2駆動制御装置211は、第1スイッチング素子101と第2スイッチング素子201を駆動している。
また、状態判定回路151、251と、インターロック信号生成回路141、241と、フィードバック信号生成回路131、231とによって、第1駆動制御装置111と第2駆動制御装置211に誤信号が入力したとしても、第1スイッチング素子101と第2スイッチング素子201が同時にオン(ON)しないように制御している。
また、フィルタ回路161、261によって、第1駆動制御装置111と第2駆動制御装置211の所定のタイミングによる発振経路の発生による誤動作を防止している。
【0025】
また、指令制御装置312は、前記したように故障判定回路(不図示)を備えていて、フィードバック信号生成回路131、231からのフィードバック信号LB1、LB2を入力して、第1駆動制御装置111と第2駆動制御装置211の故障を検知し、電力変換装置100の動作停止や故障の警告情報の発生を行う。
また、前記故障判定回路は、フィードバック信号生成回路131、231の出力EB1、EB2もしくは絶縁回路172、277の出力であるフィードバック信号LB1、LB2が所定時間以上連続して所定の電位を出力した場合に故障と判定する。
以上の第1実施形態は本発明の電力変換装置の基本的な回路構成と機能動作を示すものであって、実際の動作はインターロック信号生成回路141、241とフィードバック信号生成回路131、231との具体的な回路構成によって変化するので、より詳しい動作については、インターロック信号生成回路141、241とフィードバック信号生成回路131、231の具体的な回路構成を示す第2実施形態と第3実施形態において述べる。
【0026】
(第2実施形態)
次に、本発明の電力変換装置の第2実施形態を、図2〜図7を参照して説明する。
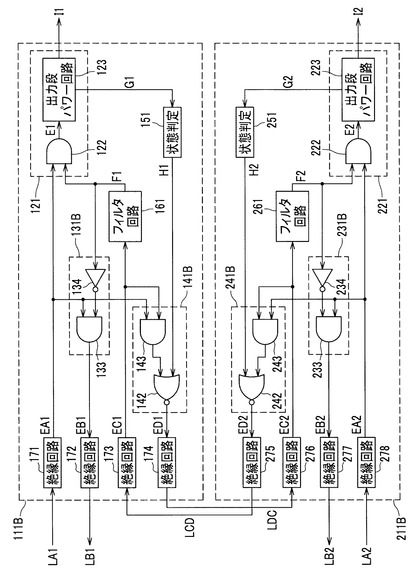
図2は、本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置の回路構成の詳細を示す図である。第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、表記を省略している。
また、図2の第1駆動制御装置111Aと、図1の第1駆動制御装置111との相違は、フィードバック信号生成回路131Aとインターロック信号生成回路141Aの2点にある。
【0027】
第1点として、図2のフィードバック信号生成回路131Aは、図1のフィードバック信号生成回路131に相当するが、フィードバック信号生成回路131Aとして排他的論理和(XOR)132を用いており、絶縁回路171の駆動指令信号EA1と状態判定回路151の出力である導通状態判定信号H1を入力としている。ただし、フィルタ回路161の出力であるフィルタ出力信号F1は入力していない。
第2点として、図2のインターロック信号生成回路141Aは、図1のインターロック信号生成回路141に相当するが、インターロック信号生成回路141Aとして論理積(AND)回路143と否定論理和(NOR)回路142を備えた回路としている。
なお、論理積回路143には、絶縁回路171の駆動指令信号EA1とインターロック信号EC1の2信号が入力し、否定論理和回路142には状態判定回路151の出力である導通状態判定信号H1と論理積回路143の出力の2信号が入力している。
【0028】
また、図2の第2駆動制御装置211Aと、図1の第2駆動制御装置211との相違は、フィードバック信号生成回路231Aとインターロック信号生成回路241Aの2点にある。第2駆動制御装置211Aと第1駆動制御装置111Aは基本的には同一の構成をしているので、重複する説明は省略する。
また、図2と図1の電力変換装置の構成は、前記したように第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、第1、第2駆動制御装置以外における重複する説明は省略する。
【0029】
<第2実施形態の動作>
次に、第2実施形態の動作を図3を参照して説明する。
まず、上アーム、下アーム(それぞれスイッチング素子101、スイッチング素子201、図1)の駆動指令信号EA1、EA2が同時にオンになった場合にアーム短絡(スイッチング素子101、201間の短絡)を抑止できる理由を、図3および図2を参照して説明する。
図2において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合、上・下アームの駆動制御装置111A、211Aは上下対称に動作するので、上アームの駆動制御装置111Aの出力するインターロック信号LDCと入力するインターロック信号LCDは等しいと過渡的には見なせる。このときの状態(LDC=LCD)が成立しているときの等価回路を、絶縁回路174の出力LDCを絶縁回路173の入力LCDに仮想的に直結させ、上アーム分に相当する回路を切り取って簡略化して示したものが図3である。
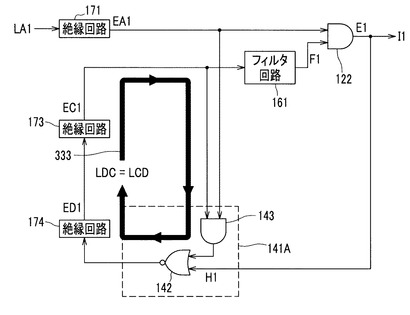
【0030】
図3は、前記したように図2に示す駆動制御装置111A、211Aにおいて、駆動指令信号EA1、EA2が同時オン時の挙動を説明する仮想的な回路の簡略図である。駆動指令信号EA1、EA2が同時オンした場合には、駆動制御装置111A、211Aは対称的に動作する。したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、図2の回路を仮想的に簡略化して図示したのが図3である。
また、図3における各回路、各回路要素の符号は図2に対応している。
【0031】
図3において、インターロック信号生成回路141Aへの第1の入力である駆動指令信号EA1がオン(High)、また第2の入力である導通状態判定信号H1がオフ(Low)のとき、出力であるインターロック信号ED1は、否定論理和回路142を通るので、第3の入力であるインターロック信号EC1の否定の信号となる。
このとき、インターロック信号生成回路141A、絶縁回路174、絶縁回路173を経由する閉回路に注目すると、一巡して論理が反転している。このような回路状態は不安定であり、前記閉回路の遅延時間の総和の2倍の周期で発振してしまう。
【0032】
ところが、この前記閉回路の遅延時間の総和の2倍の周期よりもフィルタ回路161のフィルタの時定数が充分に大きく設定すると、発振したインターロック信号EC1をフィルタ回路161が遮断して、スイッチング素子駆動信号I1に発振した信号が入力するのを防止し、正常な動作を維持するのでアーム短絡を抑制することができる。
なお、図3において、駆動回路121(図2)に含まれる出力段パワー回路123(図2)、論理積回路122、また状態判定回路151の応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161は必須の回路ではない。
【0033】
<第2実施形態の動作波形>
次に、第2実施形態の動作波形を図4〜図7に示し、これらの動作波形を参照して、誤動作がどのように防止されているかについて述べる。
【0034】
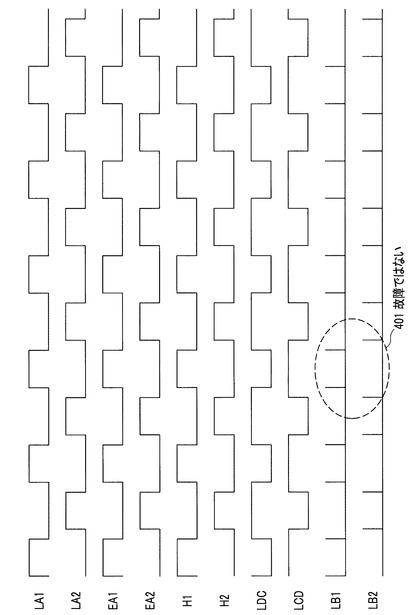
《健全時の動作波形》
図4は、本発明の第2実施形態が健全時の動作波形を示す図である。横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
図4において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。つまり、原則として、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は交互にオン(High、正電位)、オフ(Low、負電位)を繰り返している。このオン・オフの境においては、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2が相対的に短いオフ・オフの区間を経てからどちらかがオンしている。したがって、上アームと下アームが同時にオンすることにつながる駆動指令信号LA1と下アームの駆動指令信号LA2が同時にオンとなるタイミングがなく動作している。
【0035】
また、フィードバック信号LB1、LB2はごく細い幅のパルス(例えば囲線401の中のパルス)を出力しているが、これは駆動回路121、221(図2)に含まれる出力段パワー回路123、223(図2)、論理積回路122、221、また状態判定回路151、251の動作遅延によってフィードバック信号生成回路131A、231Aを構成する排他的論理和回路132、232が、前記の動作遅延の間だけ細いパルスを出力するものであり、故障ではなく正常状態で起こる現象である。フィードバック信号LB1、LB2のHighのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす。
【0036】
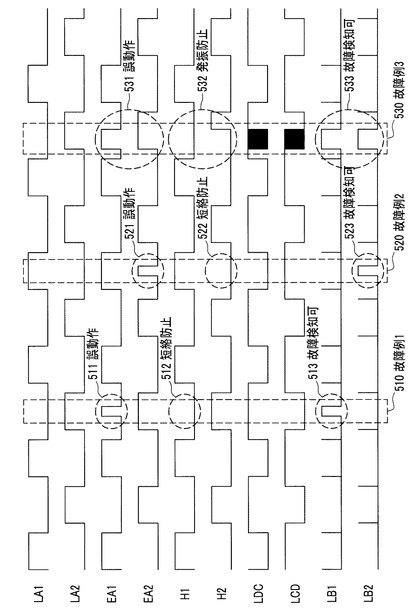
《絶縁回路が誤動作した場合の動作波形》
図5は、本発明の第2実施形態において、絶縁回路171が誤動作した場合の動作波形である。図5においては、図4と同様に、横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
【0037】
<故障例1>
故障例1(510)は、図2における上アーム側の駆動制御装置111A内の絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力したケースである。
しかしながら、下アーム側の駆動制御装置211Aの状態判定回路251の出力は、下アーム側が出力する状態であることを認識しているので、導通状態判定信号H2はHighであり、インターロック信号生成回路241Aで反転して出力されたインターロック信号LCDは、Lowである。このインターロック信号LCDは絶縁回路173とフィルタ回路161とを経て、論理積回路122にLow信号として入力している。
【0038】
したがって、前記のように絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力して論理積回路122に入力したとしても、論理積回路122の他方の入力であるフィルタ回路161の出力がLowであるので、論理積回路122の出力はLowのままであり、出力段パワー回路123からはオンパルスは出力されない。そして、導通状態判定信号H1もLowのままである。図5において、駆動指令信号EA1がオンパルスを出力(囲線511)しているにもかかわらず、囲線512で示した導通状態判定信号H1がLowのままであるのは、以上の状況を示している。したがって、上アームと下アームの短絡が防止されている。
【0039】
また、絶縁回路171の誤動作(511)によって出力したオンパルスの駆動指令信号EA1は、フィードバック信号生成回路131Aである排他的論理和(XOR)132に入力しているので、フィードバック信号LB1には、前記のオンパルスを反映した囲線513のなかのパルスが検出されるので、故障検知可能である。
【0040】
<故障例2>
同様に故障例2(520)は、下アーム側の駆動制御装置211A内の絶縁回路278の誤動作(521)によって駆動指令信号EA2がオンパルスを出力したケースである。
駆動制御装置211Aは、駆動制御装置111Aと基本的には同じ構成をしているので、故障例1(510)で駆動制御装置111Aと駆動制御装置211Aで起きた現象を駆動制御装置211Aと駆動制御装置111Aを入れ換えた現象が起きる。
したがって、誤動作(521)に示した誤動作のパルスは、下アームの導通状態判定信号H2の囲線522に示されるように下アームの駆動回路221に含まれる出力段パワー回路223には出力されず、アーム短絡が防止される。
また、フィードバック信号LB2には、前記のオンパルスを反映した囲線523のなかのパルスが検出されるので、故障検知可能である。
【0041】
<故障例3>
故障例3(530)は、故障例1と同様に上アーム側の駆動制御装置111A内の絶縁回路171の誤動作(531)によって駆動指令信号EA1がオンパルスを出力したケースであるが、それとともに下アームの駆動指令信号EA2も同時にオン(囲線531)になった場合である。
このような場合、インターロック信号LDC、LCDは、図3を参照して述べたように、高周波で発振状態になってしまうが、フィルタ回路161、261によって導通状態判定信号H1、H2の発振を防止(囲線532)し、アーム短絡を抑止できる。また、フィードバック信号FLB1、LB2(囲線533)より故障検知可能であることが分かる。
【0042】
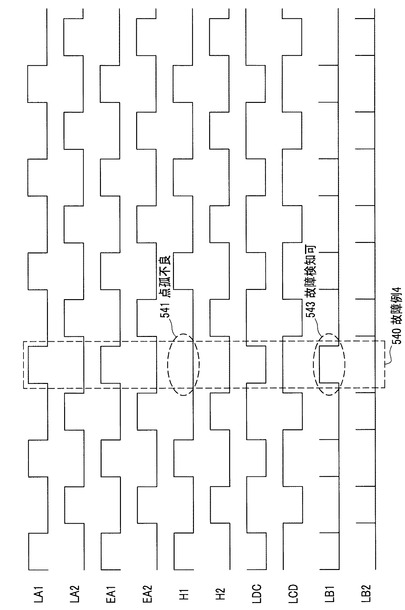
<故障例4>
図6は、本発明の第2実施形態において、スイッチング素子101、102が点弧不良の場合の動作波形を示す図である。
故障例4(540)は、上アームの駆動指令信号EA1がオンになっても、上アームのスイッチング素子101が点弧しなかったケースである。
これは上アームの駆動指令信号EA1が駆動回路121に伝達されなかったか、駆動回路121内部での誤動作で正常に動作しなかったことが推定される。
このときには、駆動回路121の出力がLowのままであるので、導通状態判定信号H1は、囲線541に示すようにLowの状態のままであり、点弧不良である信号の状態である。
【0043】
しかしながら、図2において、駆動指令信号EA1と導通状態判定信号H1がフィードバック信号生成回路131Aの排他的論理和(XOR)回路132に入力しているので、図6の故障例4(540)の区間においては、駆動指令信号EA1(High)と導通状態判定信号H1(Low)の状態であって、排他的論理和回路132はHighの信号を出力する。したがって、フィードバック信号生成回路131Aは、囲線543の故障検知に示すように、スイッチング素子101の動作不良の場合でもフィードバック信号LB1により故障検知可能であることが分かる。
以上は、駆動指令信号EA1側の点弧不良の故障検知であったが、駆動制御装置211Aは、駆動制御装置111Aと基本的には同じ構成をしているので、駆動指令信号EA2側の点弧不良の故障検知も可能である。
【0044】
<故障例5>
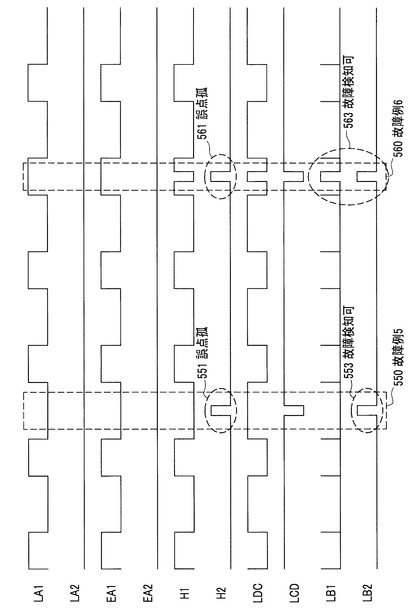
図7は、本発明の第2実施形態において、スイッチング素子が誤点弧した場合の動作波形を示す図である。
図7において、故障例5(550)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線551にオンパルス(High)が発生していることで示している。
また、図7においては、スイッチング素子201の誤動作を明確に示すために、駆動制御装置211A側の正常なパルスを表記していない。
【0045】
導通状態判定信号H2は、フィードバック信号生成回路231Aである排他的論理和回路232に入力し、また下アームの駆動指令信号EA2も排他的論理和回路232に入力している。そして、前記したように下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、導通状態判定信号H2にオンパルス(High)が発生するので排他的論理和回路232からHighの信号が出力する。したがって、フィードバック信号LB2には、囲線553内に示したHighの信号が出力するので故障検知が可能である。
【0046】
<故障例6>
図7において、故障例6(560)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線561にオンパルス(High)が発生していることで示している。
【0047】
このとき、導通状態判定信号H2は、インターロック信号生成回路241Aにおける否定論理和(NOR)回路242に入力しているので、導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241AからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経て駆動回路121の論理積(AND)回路122に入力している。
論理積回路122には、誤点弧に対応するパルスがLow(オフパルス)として入力するので、駆動指令信号EA1がオンのHighであっても、駆動回路121のスイッチング素子駆動信号I1はオフする。なお、スイッチング素子101がオフしたことを、導通状態判定信号H1においてLowとなっていることで示している。
【0048】
以上のように、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧した場合でも、誤点弧の間は上アームのスイッチング素子101がオフになり、アーム短絡が防止される。
また、誤点弧の発生した際の導通状態判定信号H2は、フィードバック信号生成回路231Aの排他的論理和回路232に入力しているので、フィードバック信号LB1から故障検知(囲線563内)が可能である。
なお、短絡を防止するためにスイッチング素子101がオフして導通状態判定信号H1もLowとなったときに、導通状態判定信号H1は、フィードバック信号生成回路131Aの排他的論理和回路132に入力しているので、フィードバック信号LB2からも故障検知(囲線563内)が可能である。
【0049】
(第3実施形態)
次に、本発明の電力変換装置の第3実施形態を、図8〜図12を参照して説明する。
図8は、本発明の電力変換装置の第3実施形態における第1、第2駆動制御装置の回路構成の詳細を示す図である。第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、表記を省略している。
また、図8の第1駆動制御装置111Bと、図1の第1駆動制御装置111との相違は、フィードバック信号生成回路131Bとインターロック信号生成回路141Bの2点にある。
【0050】
第1点として、図8のフィードバック信号生成回路131Bは、図1のフィードバック信号生成回路131に相当するが、フィードバック信号生成回路131Bとして否定(NOT)回路134と、論理積(AND)回路133を備えた回路としている。
なお、否定回路134にはフィルタ回路161の出力であるフィルタ出力信号(第1フィルタ出力信号)F1を入力し、論理積回路133には絶縁回路171の駆動指令信号EA1と否定回路134の出力の2信号が入力している。
ただし、状態判定回路151の出力である導通状態判定信号H1は入力していない。
【0051】
第2点として、図8のインターロック信号生成回路141Bは、図1のインターロック信号生成回路141に相当するが、インターロック信号生成回路141Bとして論理積(AND)回路143と否定論理和(NOR)回路142を備えた回路としている。
なお、論理積回路143には、絶縁回路171の駆動指令信号EA1とインターロック信号EC1の2信号が入力し、否定論理和回路142には状態判定回路151の出力である導通状態判定信号H1と論理積回路143の出力の2信号が入力している。
【0052】
また、図8の第2駆動制御装置211Bと、図1の第2駆動制御装置211との相違は、フィードバック信号生成回路231Bとインターロック信号生成回路241Bの2点にある。第2駆動制御装置211Bと第1駆動制御装置111Bは基本的には同一の構成をしているので、重複する説明は省略する。
また、図8と図1の電力変換装置の構成は、前記したように第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、第1、第2駆動制御装置以外における重複する説明は省略する。
【0053】
<第3実施形態の動作波形>
次に、第3実施形態の動作波形を図9〜図11に示し、これらの動作波形を参照して、誤動作がどのように防止されているかについて述べる。
【0054】
《健全時の動作波形》
図9は、本発明の第3実施形態が健全時の動作波形を示す図である。横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
図9において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。つまり、原則として、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は交互にオン(High)、オフ(Low)を繰り返している。このオン・オフの境においては、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2が相対的に短いオフ・オフの区間を経てからどちらかがオンしている。したがって、上アームと下アームが同時にオンすることにつながる駆動指令信号LA1と下アームの駆動指令信号LA2が同時にオン(High)となるタイミングがなく動作している。
【0055】
なお、第3実施形態における健全時のフィードバック信号LB1、LB2は、図4に示す第2実施形態における健全時の動作波形とは異なり、細いパルス(囲線401、図4)を出力しない。これは、第3実施形態のフィードバック信号生成回路131Bは、第2実施形態のフィードバック信号生成回路131Aと回路構成が異なるからである。
第3実施形態においては、フィードバック信号LB1、LB2がオン状態になったときに故障・異常とみなす。
【0056】
《絶縁回路が誤動作した場合の動作波形》
図10は、本発明の第3実施形態において、絶縁回路171が誤動作した場合の動作波形を示す図である。
である。図10においては、図9と同様に、横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
【0057】
<故障例1>
故障例1(610)は、図2における上アーム側の駆動制御装置111B内の絶縁回路171の誤動作(611)によって駆動指令信号EA1がオンパルスを出力したケースである。
しかしながら、下アーム側の駆動制御装置211Bの状態判定回路251の出力は、下アーム側が出力する状態であることを認識しているので、導通状態判定信号H2はHighであり、インターロック信号生成回路241Bで反転して出力されたインターロック信号LCDは、Lowである。このインターロック信号LCDは絶縁回路173とフィルタ回路161とを経て、論理積回路122にLow信号として入力している。
【0058】
したがって、前記のように絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力して論理積回路122に入力したとしても、論理積回路122の他方の入力であるフィルタ回路161の出力がLowであるので、論理積回路122の出力はLowのままであり、出力段パワー回路123からはオンパルスは出力されない。そして、導通状態判定信号H1もLowのままである。図10において、駆動指令信号EA1がオンパルスを出力(囲線611)しているにもかかわらず、囲線612で示した導通状態判定信号H1がLowのままであるのは、以上の状況を示している。したがって、上アームと下アームの短絡が防止されている。
【0059】
また、絶縁回路171の誤動作(511)によって出力したオンパルスの駆動指令信号EA1は、フィードバック信号生成回路131Aに備えられた論理積回路133に入力しているので、フィードバック信号LB1には、前記のオンパルスを反映した囲線613のなかのパルスが検出されるので、故障検知可能である。
【0060】
<故障例2>
同様に故障例2(620)は、下アーム側の駆動制御装置211B内の絶縁回路278の誤動作(621)によって駆動指令信号EA2がオンパルスを出力したケースである。
駆動制御装置211Bは、駆動制御装置111Bと基本的には同じ構成をしているので、故障例1(610)で駆動制御装置111Bと駆動制御装置211Bで起きた現象を駆動制御装置211Bと駆動制御装置111Bを入れ換えた現象が起きる。
したがって、誤動作(621)に示した誤動作のパルスは、下アームの導通状態判定信号H2の囲線622に示されるように下アームの駆動回路221に含まれる出力段パワー回路223には出力されず、アーム短絡が防止される。
また、フィードバック信号LB2には、前記のオンパルスを反映した囲線623のなかのパルスが検出されるので、故障検知可能である。
【0061】
<故障例3>
故障例3は、故障例1と同様に上アーム側の駆動制御装置111B内の絶縁回路171の誤動作(631)によって駆動指令信号EA1がオンパルスを出力したケースであるが、それとともに下アームの駆動指令信号EA2も同時にオン(囲線631)になった場合である。
このような場合、インターロック信号LDC、LCDは、図3を参照して述べたように、高周波で発振状態になってしまうが、フィルタ回路161、261によって導通状態判定信号H1、H2の発振を防止(囲線632)し、アーム短絡を抑止できる。また、フィードバック信号FLB1、LB2(囲線633)より故障検知可能であることが分かる。
【0062】
<故障例4>
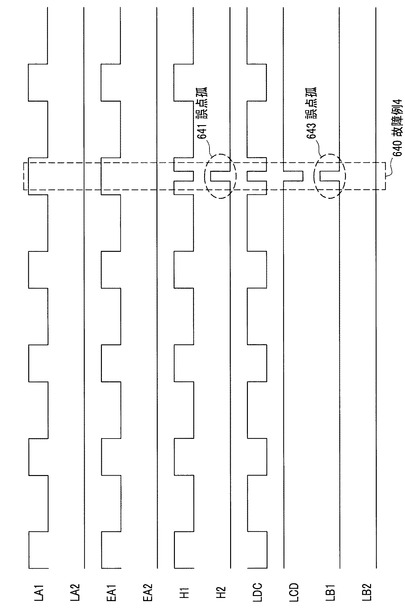
図11は、本発明の第3実施形態において、絶縁回路171が誤動作した場合のさらなる例の動作波形を示す図である。
図11において、故障例4(640)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線641にオンパルス(High)が発生していることで示している。
【0063】
このとき、導通状態判定信号H2は、インターロック信号生成回路241Bにおける否定論理和(NOR)回路242に入力しているので、導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241BからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経て駆動回路121の論理積回路(AND回路)122に入力している。
論理積(AND)回路122には、誤点弧に対応するパルスがLow(オフパルス)として入力するので、駆動指令信号EA1がオンのHighであっても、駆動回路121のスイッチング素子駆動信号I1はオフする。なお、スイッチング素子101がオフしたことを、導通状態判定信号H1においてLowとなっていることで示している。
【0064】
以上のように、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧した場合でも、誤点弧の間は上アームのスイッチング素子101がオフになり、アーム短絡が防止される。
また、誤点弧の発生した際の導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241BからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経てフィードバック信号生成回路131Bに入力しているので、フィードバック信号LB1から故障検知(囲線643内)が可能である。
【0065】
(その他の実施形態)
本発明は前記の実施形態に限定されるものではない。以下に例をあげる。
【0066】
図1において、絶縁回路171〜174、275〜278を用いず、光−電気の信号変換をせずに、指令制御装置312と第1、第2駆動制御装置との間の信号の授受を電気信号によって行った場合においても、第1〜第3実施形態で示した第1、第2駆動制御装置の制御方法は有効である。したがって、必ずしも絶縁回路171〜174、275〜278がなくともよい。
【0067】
図1において、上・下アームとなるスイッチング素子101、201は一対であって1相分の回路構成を示しているが、これらの対を3組備えて3相とした場合にも、第1〜第3実施形態で示した第1、第2駆動制御装置の制御方法は有効に作用する。
【0068】
図1において、電力変換装置に用いるスイッチング素子として、IGBTを用いて説明したが、MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)、BJT(Bipolar Junction Transistor)、BiCMOS(Bipolar Complementary Metal Oxide Semiconductor)、SiC(Silicon Carbide)素子、あるいは、他の適切なスイッチング素子を用いても良い。
【0069】
第2実施形態(図2)の発振対策として、「図3において、駆動回路121(図2)に含まれる出力段パワー回路123(図2)、論理積回路122、また状態判定回路151の応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161は必須の回路ではない。」と述べたが、第1実施形態(図1)、第3実施形態(図8)においても、前記の回路に対応する応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161、261(図1、図8)は必須の回路ではない。
【0070】
図1、図2、図8に示した第1、第2、第3実施形態において、駆動指令信号EA1、EA2、フィードバック信号EB1、EB2、導通状態判定信号H1、H2は、それぞれHighの電位で駆動信号、フィードバック信号、導通状態判定信号が能動的に作用するように設定されている。しかしながら、図1、図2、図8の回路構成の前記の各信号は、必ずしもHighの電位で各信号が能動的に作用するように設定する必要はない。Lowの電位で能動的に作用するような回路構成で設計してもよい。
したがって、例えば、図2において「フィードバック信号LB1、LB2のHighのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす」が、「フィードバック信号LB1、LB2のLowのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす」、回路構成も可能である。
【0071】
<参考回路1>
次に、従来技術(例えば特許文献1)の問題点の第1例の詳細を<参考回路1>として説明する。
図12は、従来の電力変換装置の参考回路1において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
図12において、第1駆動制御装置1111には、光信号を電気信号に変換する絶縁回路171、173と、電気信号を光信号に変換する絶縁回路174とが備えられている。
また、第2駆動制御装置1211には、光信号を電気信号に変換する絶縁回路278、276と、電気信号を光信号に変換する絶縁回路275とが備えられている。
指令制御装置(不図示)と第1駆動制御装置1111、第2駆動制御装置1211との間の信号の授受には、光信号(LA1、LA2)が用いられる。
また、第1駆動制御装置1111と第2駆動制御装置1211との間の信号の授受には、光信号(LCD、LDC)が用いられる。
【0072】
指令制御装置(不図示)の出力する光信号である駆動指令信号LA1は、光−電気変換回路である絶縁回路171で電気信号の駆動指令信号EA1に変換される。
また、指令制御装置の出力する光信号である駆動指令信号LA2は、光−電気変換回路である絶縁回路278で電気信号の駆動指令信号EA2に変換される。
【0073】
また、第1駆動制御装置1111に備えられた後記するインターロック信号生成回路1141の電気信号出力であるインターロック信号ED3は、電気−光変換回路である絶縁回路174で光信号のインターロック信号LDC(第1インターロック信号)に変換され、第2駆動制御装置1211の光−電気変換回路である絶縁回路276で再び電気信号のインターロック信号EC2に変換される。
また、第2駆動制御装置1211に備えられたインターロック信号生成回路1241の電気信号出力であるインターロック信号ED4は、電気−光変換回路である絶縁回路275で光信号のインターロック信号LCDに変換され、第1駆動制御装置1111の光−電気変換回路である絶縁回路173で再び電気信号のインターロック信号EC1に変換される。
【0074】
第1駆動制御装置1111は、論理積(AND)回路122と出力段パワー回路123からなる駆動回路121と、状態判定回路151と、インターロック信号生成回路1141と、前記した絶縁回路171、173、174とを備えて構成される。
【0075】
駆動回路121に備えられた論理積回路122には、駆動指令信号EA1とインターロック信号EC1が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路121に備えられた出力段パワー回路123は論理積回路122の出力E1に基づいて第1スイッチング素子(不図示)を駆動する。
また、状態判定回路151は、出力段パワー回路123からの導通状態信号G1を入力して、スイッチング素子の導通状態を判定し、導通状態判定信号H1を出力する。
【0076】
また、インターロック信号生成回路(NOT回路)1141は、状態判定回路151の出力の導通状態判定信号H1を入力し、反転の演算処理をしてインターロック信号ED3を生成して出力する
なお、インターロック信号生成回路1141のインターロック信号ED1は、絶縁回路174で光信号のインターロック信号LDCに変換され、第2駆動制御装置1211に送られる。
【0077】
なお、下アームの第2駆動制御装置1211は、上アームの第1駆動制御装置1111と同じ構成である。したがって、詳細な構成の説明は省略する。
【0078】
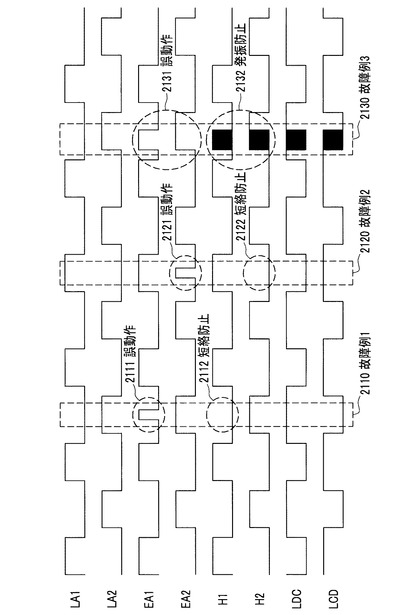
図13は、以上の参考回路1の動作波形を示す図である。
図13において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は排他的に動作している。
【0079】
<故障例1、2>
故障例1(2110)は、上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力(囲線2111)したケースであるが、上アームの導通状態判定信号H1はオフ状態(囲線2112)のままであり、アーム短絡が防止されていることが分かる。
同様に故障例2(2120)は、下アーム側の駆動制御装置1211内の絶縁回路278の誤動作によって駆動指令信号LA2がオンパルスを出力(囲線2121)したケースであるが、上アームの導通状態判定信号H2はオフ状態のままであり、アーム短絡が防止されていることが分かる。
以上、従来の参考回路1も単純な誤動作に対しては一応の策が施されている。しかしながら、次に示す故障例3に対しては不充分な回路となっている。
【0080】
<故障例3>
故障例3(2130)は、故障例1と同様に上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力したケースであるが、上・下アームの駆動指令信号LA1、EA2が同時にオンになった点が異なる。このような場合、高周波で発振状態になってしまい、アーム短絡を抑止することはできずに装置を破壊してしまう。
【0081】
参考回路1において、上・下アームの駆動指令信号LA1、LA2が同時にオンになった場合に発振する理由を、図14を参照して説明する。
図14は、前記したように図12に示す駆動制御装置1111、1211において、駆動指令信号EA1、EA2が同時オン時の挙動を説明するための仮想的な簡略図である。駆動指令信号EA1、EA2が同時オンした場合には、駆動制御装置1111、1211は対称的に動作する。したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、絶縁回路174の出力LDCを絶縁回路173の入力LCDに直結させ、上アーム分だけを切り取って、図12の回路を仮想的に簡略化して図示したのが図14である。
また、図14における各回路、各回路要素の符号は図12に対応している。
【0082】
図14において、論理積(AND)回路122の一方の入力EA1(駆動指令信号)がオンのとき、他方の入力EC1(インターロック信号)と出力E1(駆動信号)は等しくなる。このとき、論理積回路122、インターロック信号生成回路(NOT回路)1141、絶縁回路174、絶縁回路173を経由する閉回路に注目すると、一巡して論理が反転していることが分かる。このような回路状態は不安定であり、閉回路の遅延時間の総和の2倍の周期で発振してしまう。
この発振状態が図13における囲線2132で示した発振波形である。ただし、発振周波数が高いので囲線2132の中の波形は黒く塗りつぶされて表記されている。
また、この状況においては、上アーム(スイッチング素子101、図1)と下アーム(スイッチング素子201、図1)とが短絡することが起こりうる。
【0083】
<参考回路2>
次に、従来技術(例えば特許文献2)の問題点の第2例の詳細を<参考回路2>として説明する。
図15は、従来の電力変換装置の参考回路2において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
図15は、図12の回路における否定(NOT)回路によるインターロック信号生成回路1141を、否定論理和(NOR)回路によるインターロック信号生成回路3141に変更して駆動指令信号EA1の入力を追加したものである。
また、他の回路、接続関係は、図12と同じである。
【0084】
図16は、従来の電力変換装置の参考回路2の動作波形を示す図である。
図16において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。
故障例1(3110)は、上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力(囲線3111)したケースであるが、上アームの導通状態判定信号H1は、オフ状態のままであり、アーム短絡が防止されていることが分かる。
ただし、健全側の下アームの導通状態判定信号H2もオフになっている。
同様に故障例2(3120)は、下アーム側の駆動制御装置1211内の絶縁回路278の誤動作によって駆動指令信号EA2がオンパルスを出力したケースであるが、上アームの導通状態判定信号H2はオフ状態のままであり、アーム短絡が防止されていることが分かる。
ただし、健全側の上アームの導通状態判定信号H1もオフになっている。
【0085】
故障例3(3130)は、故障例1(3110)と同様に上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力したケースであるが、上・下アームの駆動指令信号EA1、EA2が同時にオンになった点が異なる。このような場合でも、参考回路1の動作波形(図13)と異なり、発振を防止かつアーム短絡を抑止することができる。
【0086】
参考回路2において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合に発振しない理由を、次に説明する。
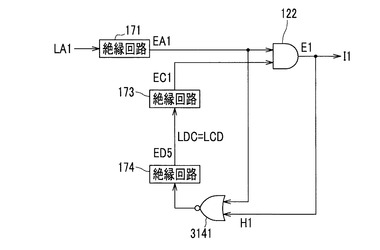
図17は、従来の電力変換装置の参考回路2の上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
図17において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合、上・下アームの駆動制御装置1111、1211は対称に動作する。
したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、絶縁回路174の出力LDCを絶縁回路173の入力LCDに直結させ、上アーム分だけを切り取って、図15の回路を仮想的に簡略化して図示したのが図17である。
また、図17における各回路、各回路要素の符号は図15に対応している。
【0087】
図17において、インターロック信号生成回路(NOR回路)3141の一方の入力EA1(駆動指令信号)がオンのとき、他方の入力H1(導通状態判定信号)の状態によらず必ず出力ED5(インターロック信号)は必ずオフになる。このため、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合でも、原理的に発振しない。
【0088】
しかしながら、故障例1(3110)、故障例2(3120)で示したように、先にオンした健全側のアームまでオフするので、前述した「入力EA1(駆動指令信号)がオンのとき、他方の入力H1(導通状態判定信号)の状態によらず必ず出力ED5(インターロック信号)は必ずオフになる」という条件が崩れて、再度オンしてしまうことがあり、出力ED5(インターロック信号)のオフ時間が短ければ過電圧によりスイッチング素子が破壊されてしまう可能性がある。
【符号の説明】
【0089】
100 電力変換装置
101 スイッチング素子(第1スイッチング素子)
110 出力端子
111、111A、111B 駆動制御装置(第1駆動制御装置)
1111、1211 駆動制御装置
1141、1241 否定回路(NOT回路)
121 駆動回路(第1駆動部)
122、133、143、222、233、243 論理積回路(AND回路)
123、223 出力段パワー回路
131、131A、131B フィードバック信号生成回路(第1フィードバック信号生成部)
132、232 排他的論理和回路(XOR回路)
141、141A、141B インターロック信号生成回路(第1インターロック信号生成部)
151 状態判定回路(第1状態判定部)
161 フィルタ回路(第1フィルタ部)
171〜174、275〜278 絶縁回路(第1絶縁部〜第8絶縁部)
201 スイッチング素子(第2スイッチング素子)
211、211A、211B 駆動制御装置(第2駆動制御装置)
221 駆動回路(第2駆動部)
231、231A、231B フィードバック信号生成回路(第2フィードバック信号生成部)
241、241A、241B インターロック信号生成回路(第2インターロック信号生成部)
251 状態判定回路(第2状態判定部)
261 フィルタ回路(第2フィルタ部)
301 直流電圧源
312 指令制御装置
3141、3241 否定論理和回路(NOR回路)
E1、E2 制御駆動信号
EA1 駆動指令信号(第1駆動指令信号)(電気信号)
EA2 駆動指令信号(第2駆動指令信号)(電気信号)
EB1 フィードバック信号(第1フィードバック信号)(電気信号)
EB2 フィードバック信号(第2フィードバック信号)(電気信号)
EC1 インターロック信号(第2インターロック信号)(電気信号)
EC2 インターロック信号(第1インターロック信号)(電気信号)
ED1 インターロック信号(第1インターロック信号)(電気信号)
ED2 インターロック信号(第2インターロック信号)(電気信号)
F1 フィルタ出力信号(第1フィルタ出力信号)
F2 フィルタ出力信号(第2フィルタ出力信号)
G1、G2 導通状態信号
H1 導通状態判定信号(第1導通状態判定信号)
H2 導通状態判定信号(第2導通状態判定信号)
I1、I2 スイッチング素子駆動信号
LA1 駆動指令信号(第1駆動指令信号)(光信号)
LA2 駆動指令信号(第2駆動指令信号)(光信号)
LB1 フィードバック信号(第1フィードバック信号)(光信号)
LB2 フィードバック信号(第2フィードバック信号)(光信号)
LCD インターロック信号(第2インターロック信号)(光信号)
LDC インターロック信号(第1インターロック信号)(光信号)
【技術分野】
【0001】
本発明は、直流電力を交流電力に、あるいは交流電力を直流電力に変換する電力変換装置に係り、特に電源に直列接続された複数のスイッチング素子のアーム短絡防止機能を有する駆動制御装置を備えた電力変換装置に関する。
【背景技術】
【0002】
直流電力を交流電力に、あるいは交流電力を直流電力に変換する手段として、スイッチング素子を用いた電力変換装置が家電品から鉄道車両まで幅広い分野で使用されている。
電力変換装置は、一般的には、直流電圧に対してスイッチング素子を2個直列に接続し、2個のスイッチング素子の間より負荷出力線を取り出すブリッジ構造をとり、さらにこのブリッジを複数組、たとえば三相インバータの場合は3組備えて構成されている。
通常、直流電圧の正極側と負荷出力線の間(上アーム)のスイッチング素子と、直流電圧の負極側と負荷出力線の間(下アーム)のスイッチング素子は排他的に動作するが、何らかのトラブルによって上・下アーム両方のスイッチング素子がオン状態(いわゆるアーム短絡)になった場合、膨大な短絡電流が上・下アーム両方のスイッチング素子に流れ、装置を破壊してしまう。このようなアーム短絡を防止するため、上・下アームのスイッチング素子を駆動する駆動制御装置間でインターロックを取る技術が知られている(特許文献1〜5参照)。
【0003】
なお、特許文献1においては、上アームの駆動指令と下アームの駆動指令は排他的に動作して、上アームのみ、もしくは下アームのみが誤動作した場合には、アーム短絡が防止される技術が開示されている。
また、特許文献2においては、上アームの駆動指令と下アームの駆動指令は排他的に動作して、上アームのみ、もしくは下アームのみが誤動作した場合、さらには、上アームと下アームが同時にオンになった場合でも発振を防止し、かつアーム短絡を抑止することができる技術が開示されている。
また、特許文献3〜5には、前記したような電力変換装置に係る一般的な技術が開示されている。
また、特許文献6においては、スイッチング素子の導通状態を検出する手段を備え、さらに検出した導通状態を、絶縁手段を介して指令制御装置に伝える手段を備えて、駆動制御装置がスイッチング素子に与える駆動信号を検証する技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭56−141782号公報
【特許文献2】特開平8−298786号公報
【特許文献3】特開2007−185024号公報
【特許文献4】特開2006−34077号公報
【特許文献5】特開2009−296732号公報
【特許文献6】特開2001−238432号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、所定の故障例のアーム短絡が防止されるものの、上・下アームの駆動指令が同時にオンになった場合に、高周波で発振状態となることがあり、アーム短絡を抑止することはできずに装置を破壊してしまうという問題がある(詳細は後記する図12〜図14に示す参考回路1を参照)。
また、特許文献2においては、上・下アームの駆動指令が同時にオンになった場合でも、発振を防止かつアーム短絡を抑止することができるものの、後記する所定の故障例では、先にオンした健全側のアームまでオフして再度オンしてしまうことがあり、オフ時間が短ければ過電圧によりスイッチング素子が破壊されてしまう可能性があるという問題がある(詳細は後記する図15〜図17に示す参考回路2を参照)。
また、特許文献1、特許文献2、特許文献6に開示された技術を組み合わせた場合には、絶縁回路の故障により誤動作が頻発するようになった際に、上・下アーム間でインターロック信号をやり取りすることでアーム短絡は抑止され、スイッチング素子の導通状態は正常状態に保たれるが、絶縁回路の故障を検知できず、鉄芯に渦電流損失が発生し、磁性部品の鉄損が増加するという問題がある。
【0006】
そこで、本発明はこのような問題点を解決するものであって、その目的は、指令制御装置の出力した駆動指令信号に関連する回路が誤動作した場合でもアーム短絡を抑止でき、かつ誤動作したことを検知する電力変換回路を提供することである。
【課題を解決するための手段】
【0007】
前記の目的を達成するために、各発明を以下のような構成にした。
すなわち、本発明の電力変換装置は、直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、前記第1スイッチング素子を駆動制御する第1駆動制御装置と、前記第2スイッチング素子を駆動制御する第2駆動制御装置と、前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、前記第1駆動制御装置は、前記指令制御装置の第1駆動指令信号と前記第2駆動制御装置の出力する第2インターロック信号との演算結果に基づいて前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、前記第1スイッチング素子の導通状態を判定する第1状態判定部と、前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、前記第1駆動指令信号と前記第2インターロック信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、前記第2駆動制御装置は、前記指令制御装置の第2駆動指令信号と前記第1駆動制御装置の出力する第1インターロック信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、前記第2スイッチング素子の導通状態を判定する第2状態判定部と、前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、前記第2駆動指令信号と前記第1インターロック信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備えることを特徴とする。
また、その他の手段は、発明を実施するための形態のなかで説明する。
【発明の効果】
【0008】
本発明によれば、指令制御装置の出力した駆動指令信号に関連する回路が誤動作した場合でもアーム短絡を抑止でき、かつ誤動作したことを検知する電力変換回路を提供できる。
【図面の簡単な説明】
【0009】
【図1】本発明の電力変換装置の第1実施形態の回路構成を示す図である。
【図2】本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置の回路構成の詳細を示す図である。
【図3】本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明する仮想的な回路の簡略図である。
【図4】本発明の電力変換装置の第2実施形態が健全時の動作波形を示す図である。
【図5】本発明の電力変換装置の第2実施形態において、絶縁回路が誤動作した場合の動作波形である。
【図6】本発明の電力変換装置の第2実施形態において、第1、第2スイッチング素子が点弧不良の場合の動作波形を示す図である。
【図7】本発明の電力変換装置の第2実施形態において、スイッチング素子が誤点弧した場合の動作波形を示す図である。
【図8】本発明の電力変換装置の第3実施形態における第1、第2駆動制御装置の回路構成の詳細を示す図である。
【図9】本発明の電力変換装置の第3実施形態が健全時の動作波形を示す図である。
【図10】本発明の電力変換装置の第3実施形態において、絶縁回路が誤動作した場合の動作波形を示す図である。
【図11】本発明の電力変換装置の第3実施形態において、絶縁回路が誤動作した場合のさらなる例の動作波形を示す図である。
【図12】従来の電力変換装置の参考回路1において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
【図13】従来の電力変換装置の参考回路1の動作波形を示す図である。
【図14】従来の電力変換装置の参考回路1に示す駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
【図15】従来の電力変換装置の参考回路2において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
【図16】従来の電力変換装置の参考回路2の動作波形を示す図である。
【図17】従来の電力変換装置の参考回路2に示す駆動制御装置において、第1、第2駆動指令信号が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態を、図面を参照して説明する。
【0011】
(第1実施形態)
本発明の電力変換装置の第1実施形態を、図1を参照して説明する。第1実施形態は本発明の電力変換装置の基本的な回路構成と機能動作を示すものである。
【0012】
《全体の概略構成》
図1は、第1実施形態の回路構成を示す図である。
図1において、第1実施形態の電力変換装置100は、直流電圧源301に直列接続された第1のスイッチング素子(以下、「第1スイッチング素子」と適宜、表記する)101と、第2のスイッチング素子(第2スイッチング素子)201と、第1スイッチング素子101を駆動する第1の駆動制御装置(第1駆動制御装置)111と、第2スイッチング素子201を駆動する第2の駆動制御装置(第2駆動制御装置)211と、第1駆動制御装置111と第2駆動制御装置211に指令を与える指令制御装置312を備えて構成される。
なお、直流電圧源301は、電力変換装置100に備えてもよいし、また電力変換装置100の外部にある直流電圧源を用いてもよい。
【0013】
《指令制御装置》
指令制御装置312からは、上アームとなる第1スイッチング素子101と下アームとなる第2スイッチング素子201を交互にオン(ON)させるための駆動信号(High、正電位)が、駆動指令信号LA1(第1駆動指令信号)と駆動指令信号LA2(第2駆動指令信号)によって第1駆動制御装置111と第2駆動制御装置211に送信される。
また、指令制御装置312は、故障判定回路(故障判定部、不図示)を備えていて、フィードバック信号LB1、LB2をそれぞれ第1駆動制御装置111と第2駆動制御装置211から受信し、ノイズなどによって、第1スイッチング素子101と第2スイッチング素子201が同時にオンして短絡電流が流れることを防止する。
なお、指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間の信号の授受は、光信号によって行われるので、次に光信号と電気信号の変換について説明する。
【0014】
《光信号と電気信号の変換》
第1駆動制御装置111には、光信号を電気信号に変換する絶縁回路(絶縁部)171(第1絶縁部)、絶縁回路173(第3絶縁部)と、電気信号を光信号に変換する絶縁回路172(第2絶縁部)、絶縁回路174(第4絶縁部)とが備えられている。
また、第2駆動制御装置211には、光信号を電気信号に変換する絶縁回路(絶縁部)278(第8絶縁部)、絶縁回路276(第6絶縁部)と、電気信号を光信号に変換する絶縁回路277(第7絶縁部)、絶縁回路275(第5絶縁部)とが備えられている。
指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間の信号の授受には、光信号(LA1、LA2、LB1、LB2)が用いられる。
また、第1駆動制御装置111と第2駆動制御装置211との間の信号の授受には、光信号(LCD、LDC)が用いられる。
これは、指令制御装置312と第1駆動制御装置111、第2駆動制御装置211との間は、電気的に隔離することと、併せて信号にノイズがのることを軽減するためである。
【0015】
指令制御装置312の出力する光信号である駆動指令信号LA1(第1駆動指令信号)は、光−電気変換回路である絶縁回路171で電気信号の駆動指令信号EA1に変換される。
また、指令制御装置312の出力する光信号である駆動指令信号LA2は、光−電気変換回路である絶縁回路278で電気信号の駆動指令信号EA2に変換される。
また、第1駆動制御装置111に備えられた後記するフィードバック信号生成回路(第1フィードバック信号生成部)131の電気信号出力であるフィードバック信号EB1は、電気−光変換回路である絶縁回路172で光信号のフィードバック信号LB1に変換される。
また、第2駆動制御装置211に備えられた後記するフィードバック信号生成回路(第1フィードバック信号生成部)231の電気信号出力であるフィードバック信号EB2は、電気−光変換回路である絶縁回路277で光信号のフィードバック信号LB2に変換される。
【0016】
また、第1駆動制御装置111に備えられた後記するインターロック信号生成回路(第1インターロック信号生成部)141の電気信号出力であるインターロック信号ED1は、電気−光変換回路である絶縁回路174で光信号のインターロック信号LDC(第1インターロック信号)に変換され、第2駆動制御装置211の光−電気変換回路である絶縁回路276で再び電気信号のインターロック信号EC2(第1インターロック信号)に変換される。
また、第2駆動制御装置211に備えられた後記するインターロック信号生成回路241の電気信号出力であるインターロック信号ED2は、電気−光変換回路である絶縁回路275で光信号のインターロック信号LCD(第2インターロック信号)に変換され、第1駆動制御装置111の光−電気変換回路である絶縁回路173で再び電気信号のインターロック信号EC1(第2インターロック信号)に変換される。
【0017】
《第1駆動制御装置》
第1駆動制御装置111は、フィルタ回路161(第1フィルタ部)と、論理積(AND)回路122および出力段パワー回路123からなる駆動回路121(第1駆動部)と、状態判定回路(図1においては「状態判定」と表記)151(第1状態判定部)と、フィードバック信号生成回路(図1においては「フィードバック信号生成」と表記)131(第1フィードバック信号生成部)と、インターロック信号生成回路(図1においては「インターロック信号生成」と表記)141(第1インターロック信号生成部)と、前記した絶縁回路171〜174と、を備えて構成される。
【0018】
フィルタ回路161は、絶縁回路173の出力するインターロック信号EC1を入力して高周波成分を除去し、論理積回路122とフィードバック信号生成回路131に出力信号を送っている。
駆動回路121に備えられた論理積回路122には、前記したフィルタ回路161の出力であるフィルタ出力信号F1と絶縁回路171の駆動指令信号EA1が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路121に備えられた出力段パワー回路123は論理積回路122の出力である制御駆動信号E1に基づいて第1スイッチング素子101を駆動する。
また、状態判定回路151は、出力段パワー回路123からの導通状態信号G1を入力して、スイッチング素子101の導通状態を判定し、導通状態判定信号H1を出力する。
【0019】
また、インターロック信号生成回路141は、絶縁回路171の駆動指令信号EA1と、絶縁回路173のインターロック信号EC1と、状態判定回路151の出力の導通状態判定信号H1を入力し、演算処理をしてインターロック信号ED1を生成して出力する
また、フィードバック信号生成回路131は、絶縁回路171の駆動指令信号EA1と、フィルタ回路161の出力であるフィルタ出力信号(第1フィルタ出力信号)F1と、状態判定回路151の出力である導通状態判定信号H1を入力し、演算処理をしてフィードバック信号EB1(第1フィードバック信号)を出力する。
なお、インターロック信号生成回路141のインターロック信号ED1は、絶縁回路174で光信号のインターロック信号LDCに変換され、第2駆動制御装置211に送られる。
また、フィードバック信号生成回路131のフィードバック信号EB1は、絶縁回路172で光信号のフィードバック信号LB1(第1フィードバック信号)に変換され、指令制御装置312に送られる。
【0020】
《第2駆動制御装置》
第2駆動制御装置211は、フィルタ回路261(第2フィルタ部)と、論理積(AND)回路222および出力段パワー回路223からなる駆動回路221(第2駆動部)と、状態判定回路251(第2状態判定部)と、フィードバック信号生成回路231(第2フィードバック信号生成部)と、インターロック信号生成回路241(第2インターロック信号生成部)と、前記した絶縁回路275〜278とを備えて構成される。
【0021】
フィルタ回路261は、絶縁回路276の出力するインターロック信号EC2を入力して高周波成分を除去し、論理積回路222とフィードバック信号生成回路231に出力信号を送っている。
駆動回路221に備えられた論理積回路222には、前記したフィルタ回路261の出力であるフィルタ出力信号F2と絶縁回路278の駆動指令信号EA2が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路221に備えられた出力段パワー回路223は論理積回路222の出力E2に基づいて第2スイッチング素子201を駆動する。
また、状態判定回路251は、出力段パワー回路223からの導通状態信号G2を入力して、スイッチング素子201の導通状態を判定し、導通状態判定信号H2を出力する。
【0022】
また、インターロック信号生成回路241は、絶縁回路278の駆動指令信号EA2と、絶縁回路276のインターロック信号EC2と、状態判定回路251の出力の導通状態判定信号H2を入力し、演算処理をしてインターロック信号ED2を生成して出力する
また、フィードバック信号生成回路231は、絶縁回路278の駆動指令信号EA2と、フィルタ回路261の出力であるフィルタ出力信号(第2フィルタ出力信号)F2と、状態判定回路251の出力である導通状態判定信号H2を入力し、演算処理をしてフィードバック信号EB2(第2フィードバック信号)を出力する。
なお、インターロック信号生成回路241のインターロック信号ED2は、絶縁回路275で光信号のインターロック信号LCDに変換され、第1駆動制御装置111に送られる。
また、フィードバック信号生成回路231のフィードバック信号EB2は、絶縁回路277で光信号のフィードバック信号LB2(第2フィードバック信号)に変換され、指令制御装置312に送られる。
【0023】
《スイッチング素子による出力駆動回路》
上アームとなるスイッチング素子101と下アームとなるスイッチング素子201は、IGBT(Insulated Gate Bipolar Transistor)によって構成されている。なお、IGBTは、逆並列に還流ダイオードを備えている、もしくはダイオードが寄生している。
スイッチング素子101とスイッチング素子201は直列に接続されていて、スイッチング素子101のコレクタは直流電圧源301の正極に接続され、スイッチング素子201のエミッタは直流電圧源301の負極に接続されている。また、スイッチング素子101とスイッチング素子201との接続点は、電力変換装置100の出力端子110となっている。
駆動制御装置111、211のそれぞれのスイッチング素子駆動信号I1、I2をそれぞれスイッチング素子101、201のゲートに入力して制御されることにより、電力変換装置100の出力駆動回路として動作する。
【0024】
《全体の機能動作》
以上の回路構成で、指令制御装置312の駆動指令信号LA1、LA2により、第1駆動制御装置111と第2駆動制御装置211は、第1スイッチング素子101と第2スイッチング素子201を駆動している。
また、状態判定回路151、251と、インターロック信号生成回路141、241と、フィードバック信号生成回路131、231とによって、第1駆動制御装置111と第2駆動制御装置211に誤信号が入力したとしても、第1スイッチング素子101と第2スイッチング素子201が同時にオン(ON)しないように制御している。
また、フィルタ回路161、261によって、第1駆動制御装置111と第2駆動制御装置211の所定のタイミングによる発振経路の発生による誤動作を防止している。
【0025】
また、指令制御装置312は、前記したように故障判定回路(不図示)を備えていて、フィードバック信号生成回路131、231からのフィードバック信号LB1、LB2を入力して、第1駆動制御装置111と第2駆動制御装置211の故障を検知し、電力変換装置100の動作停止や故障の警告情報の発生を行う。
また、前記故障判定回路は、フィードバック信号生成回路131、231の出力EB1、EB2もしくは絶縁回路172、277の出力であるフィードバック信号LB1、LB2が所定時間以上連続して所定の電位を出力した場合に故障と判定する。
以上の第1実施形態は本発明の電力変換装置の基本的な回路構成と機能動作を示すものであって、実際の動作はインターロック信号生成回路141、241とフィードバック信号生成回路131、231との具体的な回路構成によって変化するので、より詳しい動作については、インターロック信号生成回路141、241とフィードバック信号生成回路131、231の具体的な回路構成を示す第2実施形態と第3実施形態において述べる。
【0026】
(第2実施形態)
次に、本発明の電力変換装置の第2実施形態を、図2〜図7を参照して説明する。
図2は、本発明の電力変換装置の第2実施形態の第1、第2駆動制御装置の回路構成の詳細を示す図である。第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、表記を省略している。
また、図2の第1駆動制御装置111Aと、図1の第1駆動制御装置111との相違は、フィードバック信号生成回路131Aとインターロック信号生成回路141Aの2点にある。
【0027】
第1点として、図2のフィードバック信号生成回路131Aは、図1のフィードバック信号生成回路131に相当するが、フィードバック信号生成回路131Aとして排他的論理和(XOR)132を用いており、絶縁回路171の駆動指令信号EA1と状態判定回路151の出力である導通状態判定信号H1を入力としている。ただし、フィルタ回路161の出力であるフィルタ出力信号F1は入力していない。
第2点として、図2のインターロック信号生成回路141Aは、図1のインターロック信号生成回路141に相当するが、インターロック信号生成回路141Aとして論理積(AND)回路143と否定論理和(NOR)回路142を備えた回路としている。
なお、論理積回路143には、絶縁回路171の駆動指令信号EA1とインターロック信号EC1の2信号が入力し、否定論理和回路142には状態判定回路151の出力である導通状態判定信号H1と論理積回路143の出力の2信号が入力している。
【0028】
また、図2の第2駆動制御装置211Aと、図1の第2駆動制御装置211との相違は、フィードバック信号生成回路231Aとインターロック信号生成回路241Aの2点にある。第2駆動制御装置211Aと第1駆動制御装置111Aは基本的には同一の構成をしているので、重複する説明は省略する。
また、図2と図1の電力変換装置の構成は、前記したように第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、第1、第2駆動制御装置以外における重複する説明は省略する。
【0029】
<第2実施形態の動作>
次に、第2実施形態の動作を図3を参照して説明する。
まず、上アーム、下アーム(それぞれスイッチング素子101、スイッチング素子201、図1)の駆動指令信号EA1、EA2が同時にオンになった場合にアーム短絡(スイッチング素子101、201間の短絡)を抑止できる理由を、図3および図2を参照して説明する。
図2において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合、上・下アームの駆動制御装置111A、211Aは上下対称に動作するので、上アームの駆動制御装置111Aの出力するインターロック信号LDCと入力するインターロック信号LCDは等しいと過渡的には見なせる。このときの状態(LDC=LCD)が成立しているときの等価回路を、絶縁回路174の出力LDCを絶縁回路173の入力LCDに仮想的に直結させ、上アーム分に相当する回路を切り取って簡略化して示したものが図3である。
【0030】
図3は、前記したように図2に示す駆動制御装置111A、211Aにおいて、駆動指令信号EA1、EA2が同時オン時の挙動を説明する仮想的な回路の簡略図である。駆動指令信号EA1、EA2が同時オンした場合には、駆動制御装置111A、211Aは対称的に動作する。したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、図2の回路を仮想的に簡略化して図示したのが図3である。
また、図3における各回路、各回路要素の符号は図2に対応している。
【0031】
図3において、インターロック信号生成回路141Aへの第1の入力である駆動指令信号EA1がオン(High)、また第2の入力である導通状態判定信号H1がオフ(Low)のとき、出力であるインターロック信号ED1は、否定論理和回路142を通るので、第3の入力であるインターロック信号EC1の否定の信号となる。
このとき、インターロック信号生成回路141A、絶縁回路174、絶縁回路173を経由する閉回路に注目すると、一巡して論理が反転している。このような回路状態は不安定であり、前記閉回路の遅延時間の総和の2倍の周期で発振してしまう。
【0032】
ところが、この前記閉回路の遅延時間の総和の2倍の周期よりもフィルタ回路161のフィルタの時定数が充分に大きく設定すると、発振したインターロック信号EC1をフィルタ回路161が遮断して、スイッチング素子駆動信号I1に発振した信号が入力するのを防止し、正常な動作を維持するのでアーム短絡を抑制することができる。
なお、図3において、駆動回路121(図2)に含まれる出力段パワー回路123(図2)、論理積回路122、また状態判定回路151の応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161は必須の回路ではない。
【0033】
<第2実施形態の動作波形>
次に、第2実施形態の動作波形を図4〜図7に示し、これらの動作波形を参照して、誤動作がどのように防止されているかについて述べる。
【0034】
《健全時の動作波形》
図4は、本発明の第2実施形態が健全時の動作波形を示す図である。横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
図4において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。つまり、原則として、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は交互にオン(High、正電位)、オフ(Low、負電位)を繰り返している。このオン・オフの境においては、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2が相対的に短いオフ・オフの区間を経てからどちらかがオンしている。したがって、上アームと下アームが同時にオンすることにつながる駆動指令信号LA1と下アームの駆動指令信号LA2が同時にオンとなるタイミングがなく動作している。
【0035】
また、フィードバック信号LB1、LB2はごく細い幅のパルス(例えば囲線401の中のパルス)を出力しているが、これは駆動回路121、221(図2)に含まれる出力段パワー回路123、223(図2)、論理積回路122、221、また状態判定回路151、251の動作遅延によってフィードバック信号生成回路131A、231Aを構成する排他的論理和回路132、232が、前記の動作遅延の間だけ細いパルスを出力するものであり、故障ではなく正常状態で起こる現象である。フィードバック信号LB1、LB2のHighのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす。
【0036】
《絶縁回路が誤動作した場合の動作波形》
図5は、本発明の第2実施形態において、絶縁回路171が誤動作した場合の動作波形である。図5においては、図4と同様に、横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
【0037】
<故障例1>
故障例1(510)は、図2における上アーム側の駆動制御装置111A内の絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力したケースである。
しかしながら、下アーム側の駆動制御装置211Aの状態判定回路251の出力は、下アーム側が出力する状態であることを認識しているので、導通状態判定信号H2はHighであり、インターロック信号生成回路241Aで反転して出力されたインターロック信号LCDは、Lowである。このインターロック信号LCDは絶縁回路173とフィルタ回路161とを経て、論理積回路122にLow信号として入力している。
【0038】
したがって、前記のように絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力して論理積回路122に入力したとしても、論理積回路122の他方の入力であるフィルタ回路161の出力がLowであるので、論理積回路122の出力はLowのままであり、出力段パワー回路123からはオンパルスは出力されない。そして、導通状態判定信号H1もLowのままである。図5において、駆動指令信号EA1がオンパルスを出力(囲線511)しているにもかかわらず、囲線512で示した導通状態判定信号H1がLowのままであるのは、以上の状況を示している。したがって、上アームと下アームの短絡が防止されている。
【0039】
また、絶縁回路171の誤動作(511)によって出力したオンパルスの駆動指令信号EA1は、フィードバック信号生成回路131Aである排他的論理和(XOR)132に入力しているので、フィードバック信号LB1には、前記のオンパルスを反映した囲線513のなかのパルスが検出されるので、故障検知可能である。
【0040】
<故障例2>
同様に故障例2(520)は、下アーム側の駆動制御装置211A内の絶縁回路278の誤動作(521)によって駆動指令信号EA2がオンパルスを出力したケースである。
駆動制御装置211Aは、駆動制御装置111Aと基本的には同じ構成をしているので、故障例1(510)で駆動制御装置111Aと駆動制御装置211Aで起きた現象を駆動制御装置211Aと駆動制御装置111Aを入れ換えた現象が起きる。
したがって、誤動作(521)に示した誤動作のパルスは、下アームの導通状態判定信号H2の囲線522に示されるように下アームの駆動回路221に含まれる出力段パワー回路223には出力されず、アーム短絡が防止される。
また、フィードバック信号LB2には、前記のオンパルスを反映した囲線523のなかのパルスが検出されるので、故障検知可能である。
【0041】
<故障例3>
故障例3(530)は、故障例1と同様に上アーム側の駆動制御装置111A内の絶縁回路171の誤動作(531)によって駆動指令信号EA1がオンパルスを出力したケースであるが、それとともに下アームの駆動指令信号EA2も同時にオン(囲線531)になった場合である。
このような場合、インターロック信号LDC、LCDは、図3を参照して述べたように、高周波で発振状態になってしまうが、フィルタ回路161、261によって導通状態判定信号H1、H2の発振を防止(囲線532)し、アーム短絡を抑止できる。また、フィードバック信号FLB1、LB2(囲線533)より故障検知可能であることが分かる。
【0042】
<故障例4>
図6は、本発明の第2実施形態において、スイッチング素子101、102が点弧不良の場合の動作波形を示す図である。
故障例4(540)は、上アームの駆動指令信号EA1がオンになっても、上アームのスイッチング素子101が点弧しなかったケースである。
これは上アームの駆動指令信号EA1が駆動回路121に伝達されなかったか、駆動回路121内部での誤動作で正常に動作しなかったことが推定される。
このときには、駆動回路121の出力がLowのままであるので、導通状態判定信号H1は、囲線541に示すようにLowの状態のままであり、点弧不良である信号の状態である。
【0043】
しかしながら、図2において、駆動指令信号EA1と導通状態判定信号H1がフィードバック信号生成回路131Aの排他的論理和(XOR)回路132に入力しているので、図6の故障例4(540)の区間においては、駆動指令信号EA1(High)と導通状態判定信号H1(Low)の状態であって、排他的論理和回路132はHighの信号を出力する。したがって、フィードバック信号生成回路131Aは、囲線543の故障検知に示すように、スイッチング素子101の動作不良の場合でもフィードバック信号LB1により故障検知可能であることが分かる。
以上は、駆動指令信号EA1側の点弧不良の故障検知であったが、駆動制御装置211Aは、駆動制御装置111Aと基本的には同じ構成をしているので、駆動指令信号EA2側の点弧不良の故障検知も可能である。
【0044】
<故障例5>
図7は、本発明の第2実施形態において、スイッチング素子が誤点弧した場合の動作波形を示す図である。
図7において、故障例5(550)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線551にオンパルス(High)が発生していることで示している。
また、図7においては、スイッチング素子201の誤動作を明確に示すために、駆動制御装置211A側の正常なパルスを表記していない。
【0045】
導通状態判定信号H2は、フィードバック信号生成回路231Aである排他的論理和回路232に入力し、また下アームの駆動指令信号EA2も排他的論理和回路232に入力している。そして、前記したように下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、導通状態判定信号H2にオンパルス(High)が発生するので排他的論理和回路232からHighの信号が出力する。したがって、フィードバック信号LB2には、囲線553内に示したHighの信号が出力するので故障検知が可能である。
【0046】
<故障例6>
図7において、故障例6(560)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線561にオンパルス(High)が発生していることで示している。
【0047】
このとき、導通状態判定信号H2は、インターロック信号生成回路241Aにおける否定論理和(NOR)回路242に入力しているので、導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241AからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経て駆動回路121の論理積(AND)回路122に入力している。
論理積回路122には、誤点弧に対応するパルスがLow(オフパルス)として入力するので、駆動指令信号EA1がオンのHighであっても、駆動回路121のスイッチング素子駆動信号I1はオフする。なお、スイッチング素子101がオフしたことを、導通状態判定信号H1においてLowとなっていることで示している。
【0048】
以上のように、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧した場合でも、誤点弧の間は上アームのスイッチング素子101がオフになり、アーム短絡が防止される。
また、誤点弧の発生した際の導通状態判定信号H2は、フィードバック信号生成回路231Aの排他的論理和回路232に入力しているので、フィードバック信号LB1から故障検知(囲線563内)が可能である。
なお、短絡を防止するためにスイッチング素子101がオフして導通状態判定信号H1もLowとなったときに、導通状態判定信号H1は、フィードバック信号生成回路131Aの排他的論理和回路132に入力しているので、フィードバック信号LB2からも故障検知(囲線563内)が可能である。
【0049】
(第3実施形態)
次に、本発明の電力変換装置の第3実施形態を、図8〜図12を参照して説明する。
図8は、本発明の電力変換装置の第3実施形態における第1、第2駆動制御装置の回路構成の詳細を示す図である。第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、表記を省略している。
また、図8の第1駆動制御装置111Bと、図1の第1駆動制御装置111との相違は、フィードバック信号生成回路131Bとインターロック信号生成回路141Bの2点にある。
【0050】
第1点として、図8のフィードバック信号生成回路131Bは、図1のフィードバック信号生成回路131に相当するが、フィードバック信号生成回路131Bとして否定(NOT)回路134と、論理積(AND)回路133を備えた回路としている。
なお、否定回路134にはフィルタ回路161の出力であるフィルタ出力信号(第1フィルタ出力信号)F1を入力し、論理積回路133には絶縁回路171の駆動指令信号EA1と否定回路134の出力の2信号が入力している。
ただし、状態判定回路151の出力である導通状態判定信号H1は入力していない。
【0051】
第2点として、図8のインターロック信号生成回路141Bは、図1のインターロック信号生成回路141に相当するが、インターロック信号生成回路141Bとして論理積(AND)回路143と否定論理和(NOR)回路142を備えた回路としている。
なお、論理積回路143には、絶縁回路171の駆動指令信号EA1とインターロック信号EC1の2信号が入力し、否定論理和回路142には状態判定回路151の出力である導通状態判定信号H1と論理積回路143の出力の2信号が入力している。
【0052】
また、図8の第2駆動制御装置211Bと、図1の第2駆動制御装置211との相違は、フィードバック信号生成回路231Bとインターロック信号生成回路241Bの2点にある。第2駆動制御装置211Bと第1駆動制御装置111Bは基本的には同一の構成をしているので、重複する説明は省略する。
また、図8と図1の電力変換装置の構成は、前記したように第1、第2駆動制御装置の回路構成以外は、図1と同じ構成であるので、第1、第2駆動制御装置以外における重複する説明は省略する。
【0053】
<第3実施形態の動作波形>
次に、第3実施形態の動作波形を図9〜図11に示し、これらの動作波形を参照して、誤動作がどのように防止されているかについて述べる。
【0054】
《健全時の動作波形》
図9は、本発明の第3実施形態が健全時の動作波形を示す図である。横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
図9において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。つまり、原則として、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は交互にオン(High)、オフ(Low)を繰り返している。このオン・オフの境においては、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2が相対的に短いオフ・オフの区間を経てからどちらかがオンしている。したがって、上アームと下アームが同時にオンすることにつながる駆動指令信号LA1と下アームの駆動指令信号LA2が同時にオン(High)となるタイミングがなく動作している。
【0055】
なお、第3実施形態における健全時のフィードバック信号LB1、LB2は、図4に示す第2実施形態における健全時の動作波形とは異なり、細いパルス(囲線401、図4)を出力しない。これは、第3実施形態のフィードバック信号生成回路131Bは、第2実施形態のフィードバック信号生成回路131Aと回路構成が異なるからである。
第3実施形態においては、フィードバック信号LB1、LB2がオン状態になったときに故障・異常とみなす。
【0056】
《絶縁回路が誤動作した場合の動作波形》
図10は、本発明の第3実施形態において、絶縁回路171が誤動作した場合の動作波形を示す図である。
である。図10においては、図9と同様に、横軸は時間の経過である。また、光信号の駆動指令信号LA1、LA2、電気信号の駆動指令信号EA1、EA2、導通状態判定信号H1、H2、インターロック信号LDC、LCD、フィードバック信号LB1、LB2の各波形が示されている。
【0057】
<故障例1>
故障例1(610)は、図2における上アーム側の駆動制御装置111B内の絶縁回路171の誤動作(611)によって駆動指令信号EA1がオンパルスを出力したケースである。
しかしながら、下アーム側の駆動制御装置211Bの状態判定回路251の出力は、下アーム側が出力する状態であることを認識しているので、導通状態判定信号H2はHighであり、インターロック信号生成回路241Bで反転して出力されたインターロック信号LCDは、Lowである。このインターロック信号LCDは絶縁回路173とフィルタ回路161とを経て、論理積回路122にLow信号として入力している。
【0058】
したがって、前記のように絶縁回路171の誤動作(511)によって駆動指令信号EA1がオンパルスを出力して論理積回路122に入力したとしても、論理積回路122の他方の入力であるフィルタ回路161の出力がLowであるので、論理積回路122の出力はLowのままであり、出力段パワー回路123からはオンパルスは出力されない。そして、導通状態判定信号H1もLowのままである。図10において、駆動指令信号EA1がオンパルスを出力(囲線611)しているにもかかわらず、囲線612で示した導通状態判定信号H1がLowのままであるのは、以上の状況を示している。したがって、上アームと下アームの短絡が防止されている。
【0059】
また、絶縁回路171の誤動作(511)によって出力したオンパルスの駆動指令信号EA1は、フィードバック信号生成回路131Aに備えられた論理積回路133に入力しているので、フィードバック信号LB1には、前記のオンパルスを反映した囲線613のなかのパルスが検出されるので、故障検知可能である。
【0060】
<故障例2>
同様に故障例2(620)は、下アーム側の駆動制御装置211B内の絶縁回路278の誤動作(621)によって駆動指令信号EA2がオンパルスを出力したケースである。
駆動制御装置211Bは、駆動制御装置111Bと基本的には同じ構成をしているので、故障例1(610)で駆動制御装置111Bと駆動制御装置211Bで起きた現象を駆動制御装置211Bと駆動制御装置111Bを入れ換えた現象が起きる。
したがって、誤動作(621)に示した誤動作のパルスは、下アームの導通状態判定信号H2の囲線622に示されるように下アームの駆動回路221に含まれる出力段パワー回路223には出力されず、アーム短絡が防止される。
また、フィードバック信号LB2には、前記のオンパルスを反映した囲線623のなかのパルスが検出されるので、故障検知可能である。
【0061】
<故障例3>
故障例3は、故障例1と同様に上アーム側の駆動制御装置111B内の絶縁回路171の誤動作(631)によって駆動指令信号EA1がオンパルスを出力したケースであるが、それとともに下アームの駆動指令信号EA2も同時にオン(囲線631)になった場合である。
このような場合、インターロック信号LDC、LCDは、図3を参照して述べたように、高周波で発振状態になってしまうが、フィルタ回路161、261によって導通状態判定信号H1、H2の発振を防止(囲線632)し、アーム短絡を抑止できる。また、フィードバック信号FLB1、LB2(囲線633)より故障検知可能であることが分かる。
【0062】
<故障例4>
図11は、本発明の第3実施形態において、絶縁回路171が誤動作した場合のさらなる例の動作波形を示す図である。
図11において、故障例4(640)は、下アームの駆動指令信号EA2がオフ(Low)にもかかわらず、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧したケースである。なお、スイッチング素子201が誤点弧したことを、導通状態判定信号H2において囲線641にオンパルス(High)が発生していることで示している。
【0063】
このとき、導通状態判定信号H2は、インターロック信号生成回路241Bにおける否定論理和(NOR)回路242に入力しているので、導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241BからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経て駆動回路121の論理積回路(AND回路)122に入力している。
論理積(AND)回路122には、誤点弧に対応するパルスがLow(オフパルス)として入力するので、駆動指令信号EA1がオンのHighであっても、駆動回路121のスイッチング素子駆動信号I1はオフする。なお、スイッチング素子101がオフしたことを、導通状態判定信号H1においてLowとなっていることで示している。
【0064】
以上のように、上アームのスイッチング素子101が点弧中に下アームのスイッチング素子201が誤点弧した場合でも、誤点弧の間は上アームのスイッチング素子101がオフになり、アーム短絡が防止される。
また、誤点弧の発生した際の導通状態判定信号H2のオンパルス(High)は、インターロック信号生成回路241BからLow(オフパルス)のインターロック信号ED2として出力し、絶縁回路275で光信号のインターロック信号LCD(Low、オフパルス)に変換され、さらに絶縁回路173で電気信号のインターロック信号EC1に変換され、フィルタ回路161を経てフィードバック信号生成回路131Bに入力しているので、フィードバック信号LB1から故障検知(囲線643内)が可能である。
【0065】
(その他の実施形態)
本発明は前記の実施形態に限定されるものではない。以下に例をあげる。
【0066】
図1において、絶縁回路171〜174、275〜278を用いず、光−電気の信号変換をせずに、指令制御装置312と第1、第2駆動制御装置との間の信号の授受を電気信号によって行った場合においても、第1〜第3実施形態で示した第1、第2駆動制御装置の制御方法は有効である。したがって、必ずしも絶縁回路171〜174、275〜278がなくともよい。
【0067】
図1において、上・下アームとなるスイッチング素子101、201は一対であって1相分の回路構成を示しているが、これらの対を3組備えて3相とした場合にも、第1〜第3実施形態で示した第1、第2駆動制御装置の制御方法は有効に作用する。
【0068】
図1において、電力変換装置に用いるスイッチング素子として、IGBTを用いて説明したが、MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor)、BJT(Bipolar Junction Transistor)、BiCMOS(Bipolar Complementary Metal Oxide Semiconductor)、SiC(Silicon Carbide)素子、あるいは、他の適切なスイッチング素子を用いても良い。
【0069】
第2実施形態(図2)の発振対策として、「図3において、駆動回路121(図2)に含まれる出力段パワー回路123(図2)、論理積回路122、また状態判定回路151の応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161は必須の回路ではない。」と述べたが、第1実施形態(図1)、第3実施形態(図8)においても、前記の回路に対応する応答時定数に対し、発振周波数が充分に高い場合は、フィルタ回路161、261(図1、図8)は必須の回路ではない。
【0070】
図1、図2、図8に示した第1、第2、第3実施形態において、駆動指令信号EA1、EA2、フィードバック信号EB1、EB2、導通状態判定信号H1、H2は、それぞれHighの電位で駆動信号、フィードバック信号、導通状態判定信号が能動的に作用するように設定されている。しかしながら、図1、図2、図8の回路構成の前記の各信号は、必ずしもHighの電位で各信号が能動的に作用するように設定する必要はない。Lowの電位で能動的に作用するような回路構成で設計してもよい。
したがって、例えば、図2において「フィードバック信号LB1、LB2のHighのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす」が、「フィードバック信号LB1、LB2のLowのオンパルス(所定電位のパルス)幅が上記の遅延時間(所定の時間)を越えたときに故障あるいは異常とみなす」、回路構成も可能である。
【0071】
<参考回路1>
次に、従来技術(例えば特許文献1)の問題点の第1例の詳細を<参考回路1>として説明する。
図12は、従来の電力変換装置の参考回路1において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
図12において、第1駆動制御装置1111には、光信号を電気信号に変換する絶縁回路171、173と、電気信号を光信号に変換する絶縁回路174とが備えられている。
また、第2駆動制御装置1211には、光信号を電気信号に変換する絶縁回路278、276と、電気信号を光信号に変換する絶縁回路275とが備えられている。
指令制御装置(不図示)と第1駆動制御装置1111、第2駆動制御装置1211との間の信号の授受には、光信号(LA1、LA2)が用いられる。
また、第1駆動制御装置1111と第2駆動制御装置1211との間の信号の授受には、光信号(LCD、LDC)が用いられる。
【0072】
指令制御装置(不図示)の出力する光信号である駆動指令信号LA1は、光−電気変換回路である絶縁回路171で電気信号の駆動指令信号EA1に変換される。
また、指令制御装置の出力する光信号である駆動指令信号LA2は、光−電気変換回路である絶縁回路278で電気信号の駆動指令信号EA2に変換される。
【0073】
また、第1駆動制御装置1111に備えられた後記するインターロック信号生成回路1141の電気信号出力であるインターロック信号ED3は、電気−光変換回路である絶縁回路174で光信号のインターロック信号LDC(第1インターロック信号)に変換され、第2駆動制御装置1211の光−電気変換回路である絶縁回路276で再び電気信号のインターロック信号EC2に変換される。
また、第2駆動制御装置1211に備えられたインターロック信号生成回路1241の電気信号出力であるインターロック信号ED4は、電気−光変換回路である絶縁回路275で光信号のインターロック信号LCDに変換され、第1駆動制御装置1111の光−電気変換回路である絶縁回路173で再び電気信号のインターロック信号EC1に変換される。
【0074】
第1駆動制御装置1111は、論理積(AND)回路122と出力段パワー回路123からなる駆動回路121と、状態判定回路151と、インターロック信号生成回路1141と、前記した絶縁回路171、173、174とを備えて構成される。
【0075】
駆動回路121に備えられた論理積回路122には、駆動指令信号EA1とインターロック信号EC1が入力してこれらの信号の論理積(AND)を求めている。また、駆動回路121に備えられた出力段パワー回路123は論理積回路122の出力E1に基づいて第1スイッチング素子(不図示)を駆動する。
また、状態判定回路151は、出力段パワー回路123からの導通状態信号G1を入力して、スイッチング素子の導通状態を判定し、導通状態判定信号H1を出力する。
【0076】
また、インターロック信号生成回路(NOT回路)1141は、状態判定回路151の出力の導通状態判定信号H1を入力し、反転の演算処理をしてインターロック信号ED3を生成して出力する
なお、インターロック信号生成回路1141のインターロック信号ED1は、絶縁回路174で光信号のインターロック信号LDCに変換され、第2駆動制御装置1211に送られる。
【0077】
なお、下アームの第2駆動制御装置1211は、上アームの第1駆動制御装置1111と同じ構成である。したがって、詳細な構成の説明は省略する。
【0078】
図13は、以上の参考回路1の動作波形を示す図である。
図13において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は排他的に動作している。
【0079】
<故障例1、2>
故障例1(2110)は、上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力(囲線2111)したケースであるが、上アームの導通状態判定信号H1はオフ状態(囲線2112)のままであり、アーム短絡が防止されていることが分かる。
同様に故障例2(2120)は、下アーム側の駆動制御装置1211内の絶縁回路278の誤動作によって駆動指令信号LA2がオンパルスを出力(囲線2121)したケースであるが、上アームの導通状態判定信号H2はオフ状態のままであり、アーム短絡が防止されていることが分かる。
以上、従来の参考回路1も単純な誤動作に対しては一応の策が施されている。しかしながら、次に示す故障例3に対しては不充分な回路となっている。
【0080】
<故障例3>
故障例3(2130)は、故障例1と同様に上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力したケースであるが、上・下アームの駆動指令信号LA1、EA2が同時にオンになった点が異なる。このような場合、高周波で発振状態になってしまい、アーム短絡を抑止することはできずに装置を破壊してしまう。
【0081】
参考回路1において、上・下アームの駆動指令信号LA1、LA2が同時にオンになった場合に発振する理由を、図14を参照して説明する。
図14は、前記したように図12に示す駆動制御装置1111、1211において、駆動指令信号EA1、EA2が同時オン時の挙動を説明するための仮想的な簡略図である。駆動指令信号EA1、EA2が同時オンした場合には、駆動制御装置1111、1211は対称的に動作する。したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、絶縁回路174の出力LDCを絶縁回路173の入力LCDに直結させ、上アーム分だけを切り取って、図12の回路を仮想的に簡略化して図示したのが図14である。
また、図14における各回路、各回路要素の符号は図12に対応している。
【0082】
図14において、論理積(AND)回路122の一方の入力EA1(駆動指令信号)がオンのとき、他方の入力EC1(インターロック信号)と出力E1(駆動信号)は等しくなる。このとき、論理積回路122、インターロック信号生成回路(NOT回路)1141、絶縁回路174、絶縁回路173を経由する閉回路に注目すると、一巡して論理が反転していることが分かる。このような回路状態は不安定であり、閉回路の遅延時間の総和の2倍の周期で発振してしまう。
この発振状態が図13における囲線2132で示した発振波形である。ただし、発振周波数が高いので囲線2132の中の波形は黒く塗りつぶされて表記されている。
また、この状況においては、上アーム(スイッチング素子101、図1)と下アーム(スイッチング素子201、図1)とが短絡することが起こりうる。
【0083】
<参考回路2>
次に、従来技術(例えば特許文献2)の問題点の第2例の詳細を<参考回路2>として説明する。
図15は、従来の電力変換装置の参考回路2において、誤動作に対する策が不充分な駆動制御回路を参考として示した図である。
図15は、図12の回路における否定(NOT)回路によるインターロック信号生成回路1141を、否定論理和(NOR)回路によるインターロック信号生成回路3141に変更して駆動指令信号EA1の入力を追加したものである。
また、他の回路、接続関係は、図12と同じである。
【0084】
図16は、従来の電力変換装置の参考回路2の動作波形を示す図である。
図16において、上アームの駆動指令信号LA1と下アームの駆動指令信号LA2は、排他的に動作している。
故障例1(3110)は、上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力(囲線3111)したケースであるが、上アームの導通状態判定信号H1は、オフ状態のままであり、アーム短絡が防止されていることが分かる。
ただし、健全側の下アームの導通状態判定信号H2もオフになっている。
同様に故障例2(3120)は、下アーム側の駆動制御装置1211内の絶縁回路278の誤動作によって駆動指令信号EA2がオンパルスを出力したケースであるが、上アームの導通状態判定信号H2はオフ状態のままであり、アーム短絡が防止されていることが分かる。
ただし、健全側の上アームの導通状態判定信号H1もオフになっている。
【0085】
故障例3(3130)は、故障例1(3110)と同様に上アーム側の駆動制御装置1111内の絶縁回路171の誤動作によって駆動指令信号EA1がオンパルスを出力したケースであるが、上・下アームの駆動指令信号EA1、EA2が同時にオンになった点が異なる。このような場合でも、参考回路1の動作波形(図13)と異なり、発振を防止かつアーム短絡を抑止することができる。
【0086】
参考回路2において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合に発振しない理由を、次に説明する。
図17は、従来の電力変換装置の参考回路2の上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合の挙動を説明するための仮想的な簡略図である。
図17において、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合、上・下アームの駆動制御装置1111、1211は対称に動作する。
したがって、インターロック信号LDC、LCDにおいて、過渡的にLDC=LCDが成立する状態が発生することがある。このLDC=LCDが成立する場合において、絶縁回路174の出力LDCを絶縁回路173の入力LCDに直結させ、上アーム分だけを切り取って、図15の回路を仮想的に簡略化して図示したのが図17である。
また、図17における各回路、各回路要素の符号は図15に対応している。
【0087】
図17において、インターロック信号生成回路(NOR回路)3141の一方の入力EA1(駆動指令信号)がオンのとき、他方の入力H1(導通状態判定信号)の状態によらず必ず出力ED5(インターロック信号)は必ずオフになる。このため、上・下アームの駆動指令信号EA1、EA2が同時にオンになった場合でも、原理的に発振しない。
【0088】
しかしながら、故障例1(3110)、故障例2(3120)で示したように、先にオンした健全側のアームまでオフするので、前述した「入力EA1(駆動指令信号)がオンのとき、他方の入力H1(導通状態判定信号)の状態によらず必ず出力ED5(インターロック信号)は必ずオフになる」という条件が崩れて、再度オンしてしまうことがあり、出力ED5(インターロック信号)のオフ時間が短ければ過電圧によりスイッチング素子が破壊されてしまう可能性がある。
【符号の説明】
【0089】
100 電力変換装置
101 スイッチング素子(第1スイッチング素子)
110 出力端子
111、111A、111B 駆動制御装置(第1駆動制御装置)
1111、1211 駆動制御装置
1141、1241 否定回路(NOT回路)
121 駆動回路(第1駆動部)
122、133、143、222、233、243 論理積回路(AND回路)
123、223 出力段パワー回路
131、131A、131B フィードバック信号生成回路(第1フィードバック信号生成部)
132、232 排他的論理和回路(XOR回路)
141、141A、141B インターロック信号生成回路(第1インターロック信号生成部)
151 状態判定回路(第1状態判定部)
161 フィルタ回路(第1フィルタ部)
171〜174、275〜278 絶縁回路(第1絶縁部〜第8絶縁部)
201 スイッチング素子(第2スイッチング素子)
211、211A、211B 駆動制御装置(第2駆動制御装置)
221 駆動回路(第2駆動部)
231、231A、231B フィードバック信号生成回路(第2フィードバック信号生成部)
241、241A、241B インターロック信号生成回路(第2インターロック信号生成部)
251 状態判定回路(第2状態判定部)
261 フィルタ回路(第2フィルタ部)
301 直流電圧源
312 指令制御装置
3141、3241 否定論理和回路(NOR回路)
E1、E2 制御駆動信号
EA1 駆動指令信号(第1駆動指令信号)(電気信号)
EA2 駆動指令信号(第2駆動指令信号)(電気信号)
EB1 フィードバック信号(第1フィードバック信号)(電気信号)
EB2 フィードバック信号(第2フィードバック信号)(電気信号)
EC1 インターロック信号(第2インターロック信号)(電気信号)
EC2 インターロック信号(第1インターロック信号)(電気信号)
ED1 インターロック信号(第1インターロック信号)(電気信号)
ED2 インターロック信号(第2インターロック信号)(電気信号)
F1 フィルタ出力信号(第1フィルタ出力信号)
F2 フィルタ出力信号(第2フィルタ出力信号)
G1、G2 導通状態信号
H1 導通状態判定信号(第1導通状態判定信号)
H2 導通状態判定信号(第2導通状態判定信号)
I1、I2 スイッチング素子駆動信号
LA1 駆動指令信号(第1駆動指令信号)(光信号)
LA2 駆動指令信号(第2駆動指令信号)(光信号)
LB1 フィードバック信号(第1フィードバック信号)(光信号)
LB2 フィードバック信号(第2フィードバック信号)(光信号)
LCD インターロック信号(第2インターロック信号)(光信号)
LDC インターロック信号(第1インターロック信号)(光信号)
【特許請求の範囲】
【請求項1】
直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、
前記第1スイッチング素子を駆動制御する第1駆動制御装置と、
前記第2スイッチング素子を駆動制御する第2駆動制御装置と、
前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、
前記第1駆動制御装置は、
前記指令制御装置の第1駆動指令信号と前記第2駆動制御装置の出力する第2インターロック信号との演算結果に基づいて前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、
前記第1スイッチング素子の導通状態を判定する第1状態判定部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、
前記第2駆動制御装置は、
前記指令制御装置の第2駆動指令信号と前記第1駆動制御装置の出力する第1インターロック信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、
前記第2スイッチング素子の導通状態を判定する第2状態判定部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備え
ることを特徴とする電力変換装置。
【請求項2】
前記第1駆動制御装置は、前記第1インターロック信号を前記第2駆動制御装置に供給し、前記第1フィードバック信号を前記指令制御装置に供給し、
前記第2駆動制御装置は、前記第2インターロック信号を前記第1駆動制御装置に供給し、前記第2フィードバック信号を前記指令制御装置に供給する
ことを特徴とする請求項1に記載の電力変換装置。
【請求項3】
直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、
前記第1スイッチング素子を駆動制御する第1駆動制御装置と、
前記第2スイッチング素子を駆動制御する第2駆動制御装置と、
前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、
前記第1駆動制御装置は、
前記第2駆動制御装置の出力する第2インターロック信号の高周波成分を除去する第1フィルタ部と、
前記指令制御装置の第1駆動指令信号と前記第1フィルタ部の出力する第1フィルタ出力信号とを演算して前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、
前記第1スイッチング素子の導通状態を判定する第1状態判定部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、
前記第1駆動指令信号と前記第1フィルタ出力信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、
前記第2駆動制御装置は、
前記第1駆動制御装置の出力する第1インターロック信号の高周波成分を除去する第2フィルタ部と、
前記指令制御装置の第2駆動指令信号と前記第2フィルタ部の出力する第2フィルタ出力信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、
前記第2スイッチング素子の導通状態を判定する第2状態判定部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、
前記第2駆動指令信号と前記第2フィルタ出力信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備え
ることを特徴とする電力変換装置。
【請求項4】
前記第1駆動制御装置は、前記第1インターロック信号を前記第2駆動制御装置に供給し、前記第1フィードバック信号を前記指令制御装置に供給し、
前記第2駆動制御装置は、前記第2インターロック信号を前記第1駆動制御装置に供給し、前記第2フィードバック信号を前記指令制御装置に供給する
ことを特徴とする請求項3に記載の電力変換装置。
【請求項5】
前記指令制御装置が前記第1駆動制御装置および前記第2駆動制御装置との間で信号を授受する入出力信号は光信号であり、
さらに、前記第1駆動制御装置は、第1絶縁部、第2絶縁部、第3絶縁部、第4絶縁部を備え、
前記第2駆動制御装置は、第5絶縁部、第6絶縁部、第7絶縁部、第8絶縁部を備え、
前記第1絶縁部は前記指令制御装置の第1駆動指令信号を光信号から電気信号に変換し、前記第8絶縁部は前記指令制御装置の第2駆動指令信号を光信号から電気信号に変換し、前記第2絶縁部は前記第1フィードバック信号を電気信号から光信号に変換し、前記第7絶縁部は前記第2フィードバック信号を電気信号から光信号に変換し、前記第4絶縁部は前記第1インターロック信号を電気信号から光信号に変換し、前記第5絶縁部は前記第2インターロック信号を電気信号から光信号に変換し、前記第3絶縁部は前記第5絶縁部が変換した前記第2インターロック信号の光信号を電気信号に変換し、前記第6絶縁部は前記第4絶縁部が変換した前記第1インターロック信号の光信号を電気信号に変換することを特徴とする請求項1または請求項2に記載の電力変換装置。
【請求項6】
前記指令制御装置が前記第1駆動制御装置および前記第2駆動制御装置との間で信号を授受する入出力信号は光信号であり、
さらに、前記第1駆動制御装置は、第1絶縁部、第2絶縁部、第3絶縁部、第4絶縁部を備え、
前記第2駆動制御装置は、第5絶縁部、第6絶縁部、第7絶縁部、第8絶縁部を備え、
前記第1絶縁部は前記指令制御装置の第1駆動指令信号を光信号から電気信号に変換し、前記第8絶縁部は前記指令制御装置の第2駆動指令信号を光信号から電気信号に変換し、前記第2絶縁部は前記第1フィードバック信号を電気信号から光信号に変換し、前記第7絶縁部は前記第2フィードバック信号を電気信号から光信号に変換し、前記第4絶縁部は前記第1インターロック信号を電気信号から光信号に変換し、前記第5絶縁部は前記第2インターロック信号を電気信号から光信号に変換し、前記第3絶縁部は前記第5絶縁部が変換した前記第2インターロック信号の光信号を電気信号に変換し、前記第6絶縁部は前記第4絶縁部が変換した前記第1インターロック信号の光信号を電気信号に変換することを特徴とする請求項3または請求項4に記載の電力変換装置。
【請求項7】
前記第1駆動部と前記第1スイッチング素子とによる応答時定数は、前記第3絶縁部の遅延時間と前記第5絶縁部の遅延時間と前記第2インターロック信号生成部の遅延時間の総和の2倍よりも大きいことを特徴とする請求項5に記載の電力変換装置。
【請求項8】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力信号と前記第3絶縁部の出力の否定との論理積を出力することを特徴とする請求項5乃至請求項7のいずれか一項に記載の電力変換装置。
【請求項9】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力信号と前記第1状態判定部の出力との排他的論理和を出力することを特徴とする請求項5乃至請求項7のいずれか一項に記載の電力変換装置。
【請求項10】
前記第1フィルタ部の時定数は、前記第3絶縁部の遅延時間と前記第5絶縁部の遅延時間と前記第2インターロック信号生成部の遅延時間の総和の2倍よりも大きいことを特徴とする請求項6に記載の電力変換装置。
【請求項11】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力と前記第1フィルタ部の出力の否定の論理積を出力することを特徴とする請求項6または請求項10に記載の電力変換装置。
【請求項12】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力と前記第1状態判定部の出力との排他的論理和を出力することを特徴とする請求項6または請求項10に記載の電力変換装置。
【請求項13】
前記第1フィードバック信号生成部または前記第2フィードバック信号生成部が所定の電位を所定時間以上連続して出力した場合に故障と判定する故障判定部を前記指令制御装置に備えることを特徴とする請求項1乃至請求項4に記載の電力変換装置。
【請求項14】
前記第2絶縁部または前記第7絶縁部が所定の電位を所定時間以上連続して出力した場合に故障と判定する故障判定部を前記指令制御装置に備えることを特徴とする請求項5乃至請求項12のいずれか一項に記載の電力変換装置。
【請求項15】
前記直流電圧源を前記電力変換装置に備えたことを特徴とする請求項1乃至請求項14のいずれか一項に記載の電力変換装置。
【請求項1】
直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、
前記第1スイッチング素子を駆動制御する第1駆動制御装置と、
前記第2スイッチング素子を駆動制御する第2駆動制御装置と、
前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、
前記第1駆動制御装置は、
前記指令制御装置の第1駆動指令信号と前記第2駆動制御装置の出力する第2インターロック信号との演算結果に基づいて前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、
前記第1スイッチング素子の導通状態を判定する第1状態判定部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、
前記第2駆動制御装置は、
前記指令制御装置の第2駆動指令信号と前記第1駆動制御装置の出力する第1インターロック信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、
前記第2スイッチング素子の導通状態を判定する第2状態判定部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備え
ることを特徴とする電力変換装置。
【請求項2】
前記第1駆動制御装置は、前記第1インターロック信号を前記第2駆動制御装置に供給し、前記第1フィードバック信号を前記指令制御装置に供給し、
前記第2駆動制御装置は、前記第2インターロック信号を前記第1駆動制御装置に供給し、前記第2フィードバック信号を前記指令制御装置に供給する
ことを特徴とする請求項1に記載の電力変換装置。
【請求項3】
直流電圧源に直列接続された第1スイッチング素子と第2スイッチング素子と、
前記第1スイッチング素子を駆動制御する第1駆動制御装置と、
前記第2スイッチング素子を駆動制御する第2駆動制御装置と、
前記第1駆動制御装置と前記第2駆動制御装置とに指令を与える指令制御装置とを含んでなる電力変換装置であって、
前記第1駆動制御装置は、
前記第2駆動制御装置の出力する第2インターロック信号の高周波成分を除去する第1フィルタ部と、
前記指令制御装置の第1駆動指令信号と前記第1フィルタ部の出力する第1フィルタ出力信号とを演算して前記第1スイッチング素子を駆動するスイッチング素子駆動信号を出力する第1駆動部と、
前記第1スイッチング素子の導通状態を判定する第1状態判定部と、
前記第1駆動指令信号と前記第2インターロック信号と前記第1状態判定部の出力する第1導通状態判定信号の少なくとも1つを入力して第1インターロック信号を生成する第1インターロック信号生成部と、
前記第1駆動指令信号と前記第1フィルタ出力信号と前記第1導通状態判定信号の少なくとも2つを入力して第1フィードバック信号を出力する第1フィードバック信号生成部と、を備え、
前記第2駆動制御装置は、
前記第1駆動制御装置の出力する第1インターロック信号の高周波成分を除去する第2フィルタ部と、
前記指令制御装置の第2駆動指令信号と前記第2フィルタ部の出力する第2フィルタ出力信号とを演算して前記第2スイッチング素子を駆動するスイッチング素子駆動信号を出力する第2駆動部と、
前記第2スイッチング素子の導通状態を判定する第2状態判定部と、
前記第2駆動指令信号と前記第1インターロック信号と前記第2状態判定部の出力する第2導通状態判定信号の少なくとも1つを入力して第2インターロック信号を生成する第2インターロック信号生成部と、
前記第2駆動指令信号と前記第2フィルタ出力信号と前記第2導通状態判定信号の少なくとも2つを入力して第2フィードバック信号を出力する第2フィードバック信号生成部と、を備え
ることを特徴とする電力変換装置。
【請求項4】
前記第1駆動制御装置は、前記第1インターロック信号を前記第2駆動制御装置に供給し、前記第1フィードバック信号を前記指令制御装置に供給し、
前記第2駆動制御装置は、前記第2インターロック信号を前記第1駆動制御装置に供給し、前記第2フィードバック信号を前記指令制御装置に供給する
ことを特徴とする請求項3に記載の電力変換装置。
【請求項5】
前記指令制御装置が前記第1駆動制御装置および前記第2駆動制御装置との間で信号を授受する入出力信号は光信号であり、
さらに、前記第1駆動制御装置は、第1絶縁部、第2絶縁部、第3絶縁部、第4絶縁部を備え、
前記第2駆動制御装置は、第5絶縁部、第6絶縁部、第7絶縁部、第8絶縁部を備え、
前記第1絶縁部は前記指令制御装置の第1駆動指令信号を光信号から電気信号に変換し、前記第8絶縁部は前記指令制御装置の第2駆動指令信号を光信号から電気信号に変換し、前記第2絶縁部は前記第1フィードバック信号を電気信号から光信号に変換し、前記第7絶縁部は前記第2フィードバック信号を電気信号から光信号に変換し、前記第4絶縁部は前記第1インターロック信号を電気信号から光信号に変換し、前記第5絶縁部は前記第2インターロック信号を電気信号から光信号に変換し、前記第3絶縁部は前記第5絶縁部が変換した前記第2インターロック信号の光信号を電気信号に変換し、前記第6絶縁部は前記第4絶縁部が変換した前記第1インターロック信号の光信号を電気信号に変換することを特徴とする請求項1または請求項2に記載の電力変換装置。
【請求項6】
前記指令制御装置が前記第1駆動制御装置および前記第2駆動制御装置との間で信号を授受する入出力信号は光信号であり、
さらに、前記第1駆動制御装置は、第1絶縁部、第2絶縁部、第3絶縁部、第4絶縁部を備え、
前記第2駆動制御装置は、第5絶縁部、第6絶縁部、第7絶縁部、第8絶縁部を備え、
前記第1絶縁部は前記指令制御装置の第1駆動指令信号を光信号から電気信号に変換し、前記第8絶縁部は前記指令制御装置の第2駆動指令信号を光信号から電気信号に変換し、前記第2絶縁部は前記第1フィードバック信号を電気信号から光信号に変換し、前記第7絶縁部は前記第2フィードバック信号を電気信号から光信号に変換し、前記第4絶縁部は前記第1インターロック信号を電気信号から光信号に変換し、前記第5絶縁部は前記第2インターロック信号を電気信号から光信号に変換し、前記第3絶縁部は前記第5絶縁部が変換した前記第2インターロック信号の光信号を電気信号に変換し、前記第6絶縁部は前記第4絶縁部が変換した前記第1インターロック信号の光信号を電気信号に変換することを特徴とする請求項3または請求項4に記載の電力変換装置。
【請求項7】
前記第1駆動部と前記第1スイッチング素子とによる応答時定数は、前記第3絶縁部の遅延時間と前記第5絶縁部の遅延時間と前記第2インターロック信号生成部の遅延時間の総和の2倍よりも大きいことを特徴とする請求項5に記載の電力変換装置。
【請求項8】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力信号と前記第3絶縁部の出力の否定との論理積を出力することを特徴とする請求項5乃至請求項7のいずれか一項に記載の電力変換装置。
【請求項9】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力信号と前記第1状態判定部の出力との排他的論理和を出力することを特徴とする請求項5乃至請求項7のいずれか一項に記載の電力変換装置。
【請求項10】
前記第1フィルタ部の時定数は、前記第3絶縁部の遅延時間と前記第5絶縁部の遅延時間と前記第2インターロック信号生成部の遅延時間の総和の2倍よりも大きいことを特徴とする請求項6に記載の電力変換装置。
【請求項11】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力と前記第1フィルタ部の出力の否定の論理積を出力することを特徴とする請求項6または請求項10に記載の電力変換装置。
【請求項12】
前記第1フィードバック信号生成部は、前記第1絶縁部の出力と前記第1状態判定部の出力との排他的論理和を出力することを特徴とする請求項6または請求項10に記載の電力変換装置。
【請求項13】
前記第1フィードバック信号生成部または前記第2フィードバック信号生成部が所定の電位を所定時間以上連続して出力した場合に故障と判定する故障判定部を前記指令制御装置に備えることを特徴とする請求項1乃至請求項4に記載の電力変換装置。
【請求項14】
前記第2絶縁部または前記第7絶縁部が所定の電位を所定時間以上連続して出力した場合に故障と判定する故障判定部を前記指令制御装置に備えることを特徴とする請求項5乃至請求項12のいずれか一項に記載の電力変換装置。
【請求項15】
前記直流電圧源を前記電力変換装置に備えたことを特徴とする請求項1乃至請求項14のいずれか一項に記載の電力変換装置。
【図1】



【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】
【図12】

【図13】
【図14】

【図15】

【図16】

【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−110905(P2013−110905A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255795(P2011−255795)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]