
国立大学法人東京工業大学により出願された特許
111 - 120 / 1,821
力学挙動解析システム、及び力学挙動解析方法
【課題】被解析試料の巨視的な動きを伴った場合であっても材料や構造物などの被解析試料の微視的な領域の力学挙動を簡便に解析可能な新規な力学挙動解析システム、及び力学挙動解析方法を提供する。
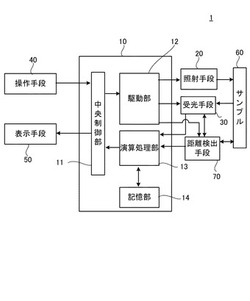
【解決手段】力学挙動解析システムは、被解析試料の解析表面を少なくとも被覆し、変形自在であって、かつ、被解析試料側の少なくとも表層に所定の周期構造が形成されている表面ラベルグレーティング膜及び被解析試料からなるサンプル60と、スポット光であるプローブ光を入射する照射手段20と、表面ラベルグレーティング膜からの回折光を検出する受光手段30と、被解析試料と受光手段との距離を検出する距離検出手段70と、回折角のデータを保持する記憶手段14と、記憶手段14に保持された複数の前記回折角のデータから、回折格子の周期構造変化を算出し、当該周期構造変化から被解析試料の力学挙動を解析する解析手段13と、を具備する。
(もっと読む)
加速度センサ特性評価方法及びプログラム

【課題】センサ主軸の方向を回転行列及びその逆行列を用いて演算し、コスト、測定時間及び測定精度の向上を図る。
【解決手段】加速度センサパッケージ1を固定する正三角状のテーブル2の各頂点に、同一長さrたとえば50mmのリンク3−1、3−2、3−3が接続されている。リンク3−1、3−2、3−3は互いに平行であり、矢印R1、R2、R3に示すごとく、これらの回転軸4−1、4−2、4−3に対して等速円運動が可能となる。この等速円運動の角度θはテーブル2上に設けられたロータリエンコーダ2aによって検出される。加速度センサパッケージ1は同時にx方向、y方向に正弦波振動を受け、これにより、加速度センサパッケージ1の2軸同時測定が可能となる。また、加速度センサパッケージ1の既知の変位がリンク3−1、3−2、3−3の長さrを半径とする真円で保証されるので、加速度センサパッケージ1の測定値の補正も可能となる。
(もっと読む)
フェライト微粒子の製造方法、フェライト微粒子、及びフェライト微粒子の製造装置
【課題】粒径が30nmから数100nmのフェライト微粒子を連続式で合成することのできる合成方法を開発する。
【解決手段】一方から2価鉄イオンを含有する反応液を送出して輸送し、他方からで酸化剤液を送出して輸送し、送出された前記反応液と前記酸化剤液とを合流させ、合流した前記反応液と前記酸化剤液とを、流れ反応器中に流しながら反応させて粒径が30nmから数100nmで結晶性の良好なフェライト微粒子を合成する。またフェライト微粒子の合成とフェライト微粒子の表面修飾とを一つにまとめた形で、表面修飾されたフェライト微粒子の製造することができるようになった。こうして粒径が30nmから数100nmの範囲の粒径を有し粒径の揃ったフェライト微粒子の表面を修飾して液に分散することにより、粒子サイズが大きく磁化が大きくしかも分散安定性に優れ、これまで実現することのできなかった分散液が製造できるようになった。
(もっと読む)
液晶性ブロック共重合体塗膜、液晶性ブロック共重合体薄膜の製造方法及びパターン形成方法
【課題】液晶性ブロック共重合体のミクロ相分離構造が一軸水平配向したナノパターンを有する良好な品質の液晶性ブロック共重合体薄膜を、大面積でも簡便に安定して製造する。
【解決手段】表面をラビング処理した配向基板14上に、液晶性ブロック鎖(A)及び該液晶性ブロック鎖(A)と非相溶なブロック鎖(B)を有する液晶性ブロック共重合体(I)と、前記ブロック鎖(A)及びブロック鎖(B)の両方と非相溶な疎水性材料(II)を含む液晶性ブロック共重合体塗膜16Aを形成する工程と、液晶性ブロック共重合体塗膜16Aを加熱処理して液晶性ブロック共重合体薄膜前駆体を形成する工程と、前記液晶性ブロック共重合体薄膜前駆体から前記疎水性材料(II)を除去する工程を有する、液晶性ブロック共重合体薄膜の製造方法。
(もっと読む)
力算出システム
【課題】小型かつ安価であって、力を算出する対象部分に電気的な装置を使わずに、その部分に与えられている力を算出すること。
【解決手段】本発明の力算出システム100は、所定の圧力で空気を送り出す空気送出部1と、空気送出部1から送り出された空気のための流路2と、外力を受けると変形することで、流路2を流れる空気の流れやすさを変化させる受感部4と、流路2を流れる空気の流量を計測する流量計3と、受感部4が受ける外力の大きさ、および、空気送出部1から送出された空気が流路を流れる流量の対応関係を示す流量・力対応関係情報531を予め記憶する記憶部53と、流量計3が計測した流路2を流れる空気の流量、および、記憶部53に記憶された流量・力対応関係情報531に基づいて、受感部4が受けている外力の大きさを算出する処理部52と、を備える。
(もっと読む)
非晶質酸化物を利用した半導体デバイス
【課題】透明酸化物膜を用いた半導体デバイスや回路を提供する。
【解決手段】電子キャリア濃度が1015/cm3以上、1018/cm3未満である、In―Zn―Ga酸化物、In―Zn―Ga―Mg酸化物、In―Zn酸化物、In―Sn酸化物、Sn−In−Zn酸化物、In酸化物、Zn―Ga酸化物、及びIn―Ga酸化物のうちのいずれかである非晶質酸化物を、N型半導体として用いたN型TFTを含む回路を構成要素としており、前記N型TFTは、ゲート電圧無印加時のソース−ドレイン端子間の電流が10マイクロアンペア未満であり、電界効果移動度が1cm2/(V・秒)超であることを特徴とする集積回路。
(もっと読む)
四輪走行車両
【課題】低コスト且つ軽量化した不整地踏破性の高い四輪走行車両を提供する。
【解決手段】車両本体部11と、受動車輪である後車輪13と、前方リンク16a及び後方リンク16bと、前方リンク及び後方リンクを連接する上方リンク16c及び下方リンク16dとからなり、平地走行時において、前方リンクが後方リンクよりも上方に配置されている車両本体部の左右に配置された一対のリンク機構16、17と、車両本体部の左右側面にそれぞれ設けられ、各リンク機構の上方リンク及び下方リンクの各中間部分を回動可能に支持してリンク機構を揺動可能に構成する各一対の支持軸18a、18bと、リンク機構の後方リンク又はその延長部に連結された能動車輪である左車輪14及び右車輪15と、車両本体部の前方に配置され、一対のリンク機構を互いに連結する連結部材20と、連結部材に配置された受動車輪である前車輪22とを具備する。
(もっと読む)
電力変換装置
【課題】簡単な構成で瞬時電圧低下から復帰した際の過電圧を抑制し、装置の小型化を図るとともに、電力損失や発熱を低減することのできる電力変換装置を提供する。
【解決手段】交流電源1の交流を直流に変換する交流―直流変換回路2と、この交流―直流変換回路2の出力を平滑する第1のコンデンサ3と、ダイオード4と抵抗5の並列接続構成に第2のコンデンサ6を直列接続することで構成され、上記第1のコンデンサ3と並列に接続される過電圧抑制回路7と、この過電圧抑制回路7に並列接続され、直流を交流に変換する直流―交流変換回路8とを具備し、上記第1及び第2のコンデンサ3、6の容量を各々C1、C2としたとき、コンデンサ容量の比C2/C1を3以上かつ20以下に設定し、交流電源1が瞬時電圧低下から復帰する場合に第1のコンデンサ3に発生する過電圧を抑制するよう構成している。
(もっと読む)
整流装置
【課題】消費電力のピークを分散させることが可能であり、さらに電圧変換効率を向上させることも可能である整流装置を提供する。
【解決手段】交流信号を直流信号に整流する整流装置は、時分割部10と整流部20とからなる。時分割部10は、交流信号に同期してその1周期毎に、所定の時間間隔の複数のスロットに1周期を分割し、所定のスロットを選択し、交流信号の選択されるスロットの所の周期的信号を出力する。整流部20は、周期的信号を直流信号に整流する。
(もっと読む)
薄膜太陽電池およびその製造方法
【課題】光閉じ込めに極めて有効な凹凸形状を形成した透明導電膜を用いた薄膜太陽電池を提供する。
【解決手段】基板上に、p型半導体層、i型半導体層およびn型半導体層、またはp型半導体層およびn型半導体層、からなる単位セルを少なくとも1個有するセル層が形成され、かつ該セル層の基板側の片面に電極層、該セル層の基板と反対側の片面に対向電極層が形成されてなる薄膜太陽電池であって、凹凸形状を有する基板上に該電極層が形成され、該基板の凹凸形状は、凹部の縦断面が深さ500〜2000nm、隣り合う頂点間の距離が2〜5μm、かつ凹部の谷部における水平方向における傾斜角度が10〜30度であり、該電極層は透明導電膜であることを特徴とする薄膜太陽電池。
(もっと読む)
111 - 120 / 1,821
[ Back to top ]